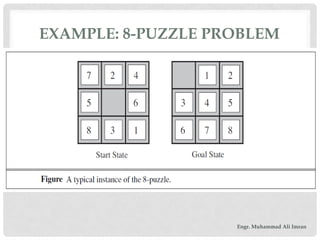
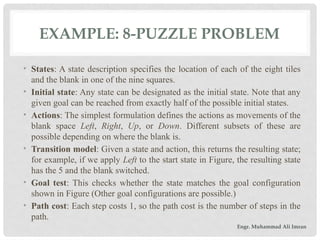
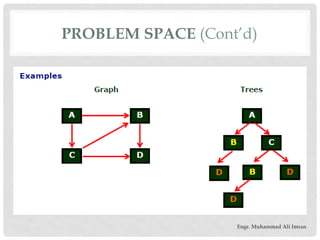
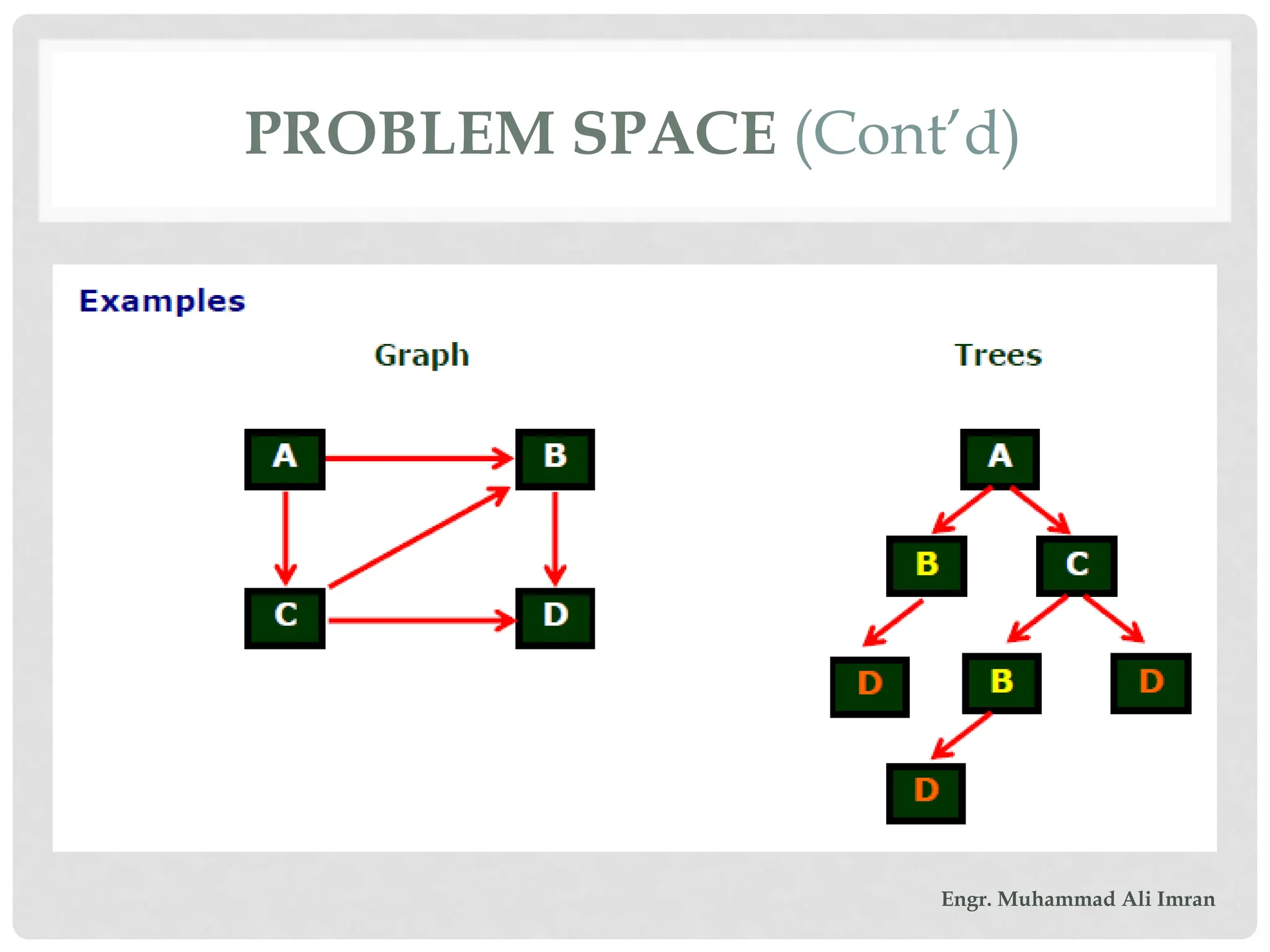
This document discusses the nature of problem-solving in artificial intelligence (AI), emphasizing its historical significance as a measure of intelligence and the various methods employed, such as direct and indirect approaches. It describes classical problem-solving techniques, toy versus real-world problems, and provides examples like the 8-puzzle and tower of Hanoi to illustrate problem spaces and search strategies. The document also highlights the importance of understanding state, actions, and path costs in the context of solving problems algorithmically.




























![Agentic Systems and Compliance - A brief intro [1.2]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticsystemsandcompliace-1-251018025303-958a42ec-thumbnail.jpg?width=600ounds&width=560&fit=bounds)










![Matrix and determinant URT [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/matrixanddeterminanturtautosaved-251018190340-9e6a6deb-thumbnail.jpg?width=600ounds&width=560&fit=bounds)







