Download to read offline
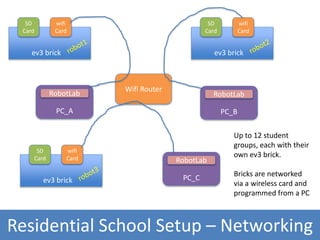
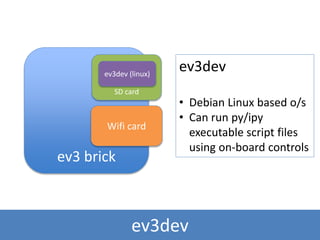
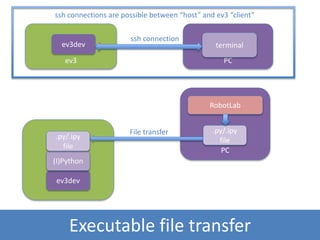
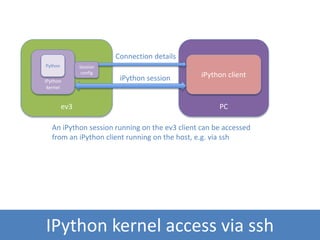
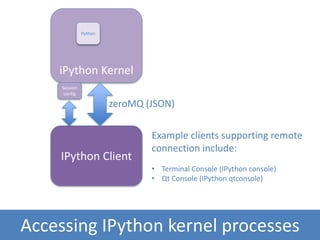

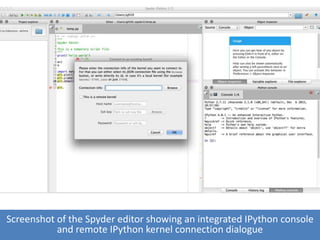
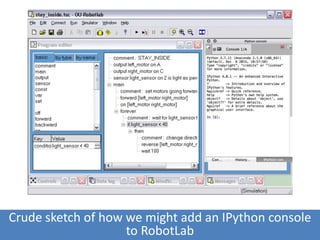
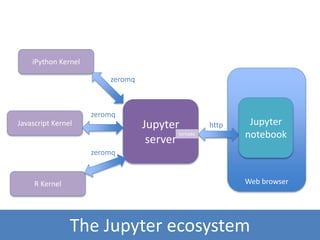
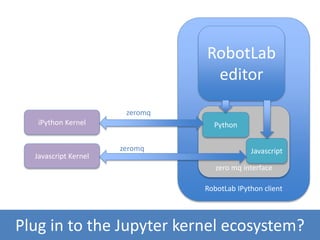
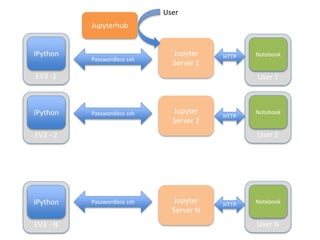
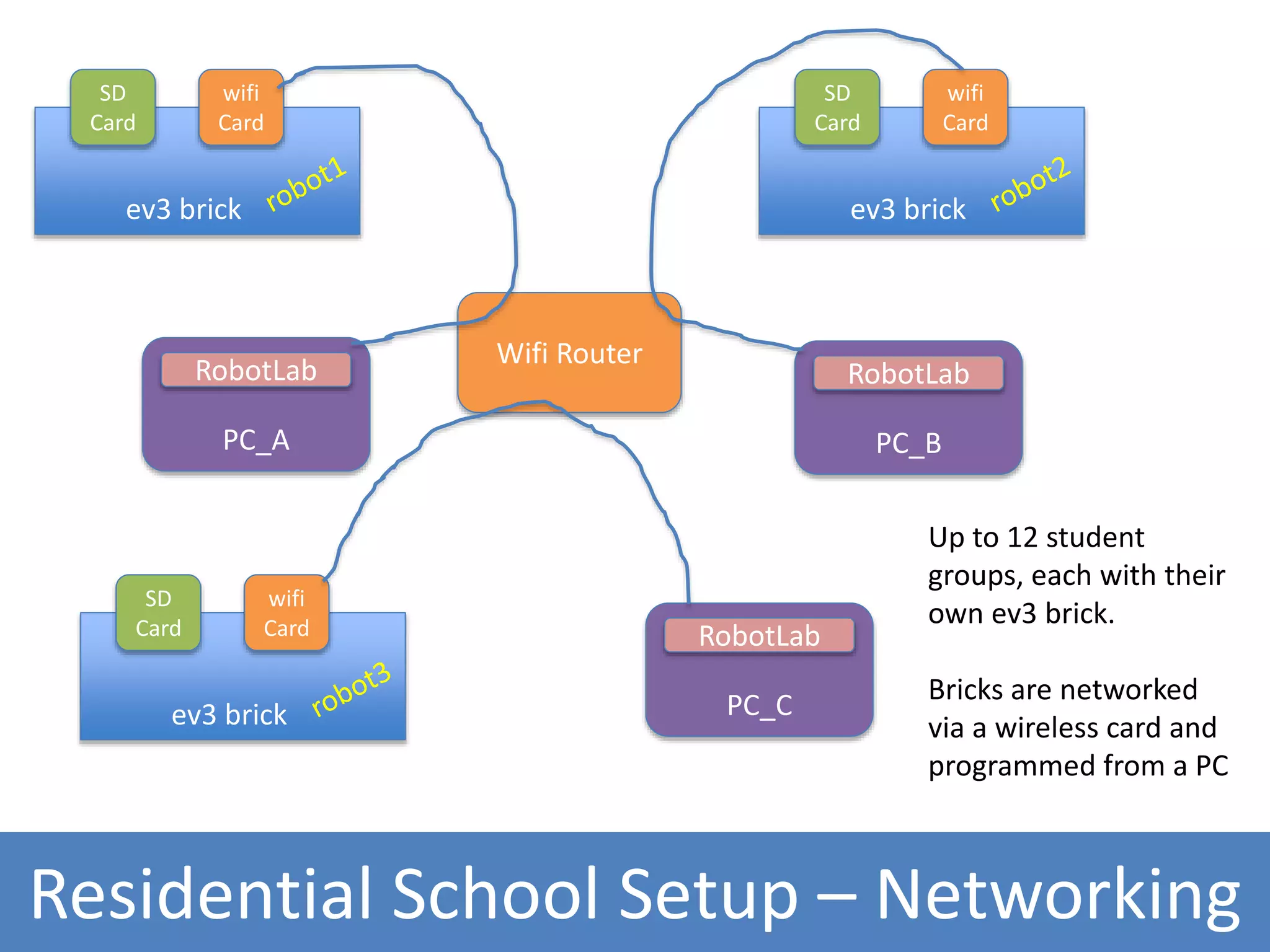
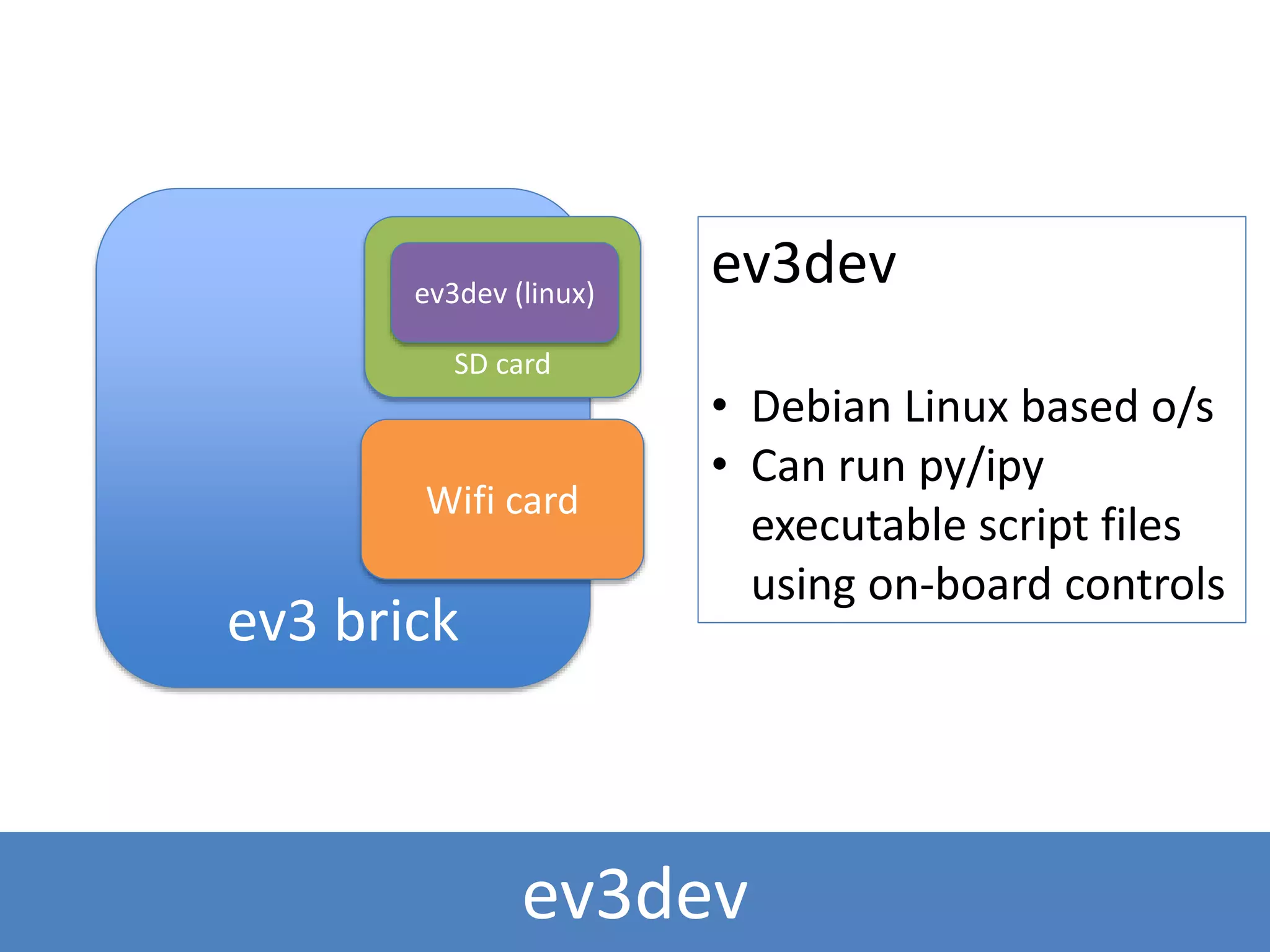
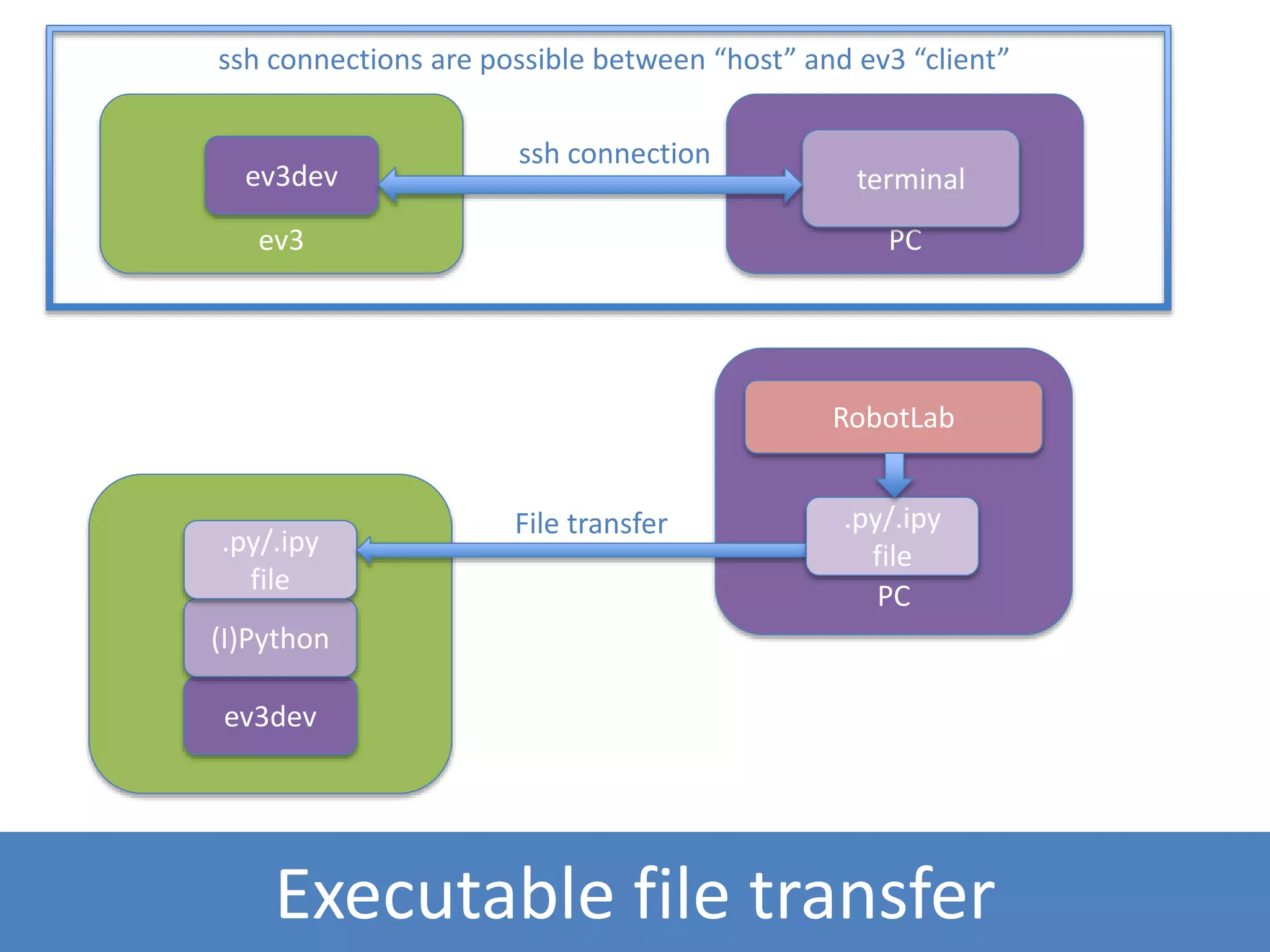
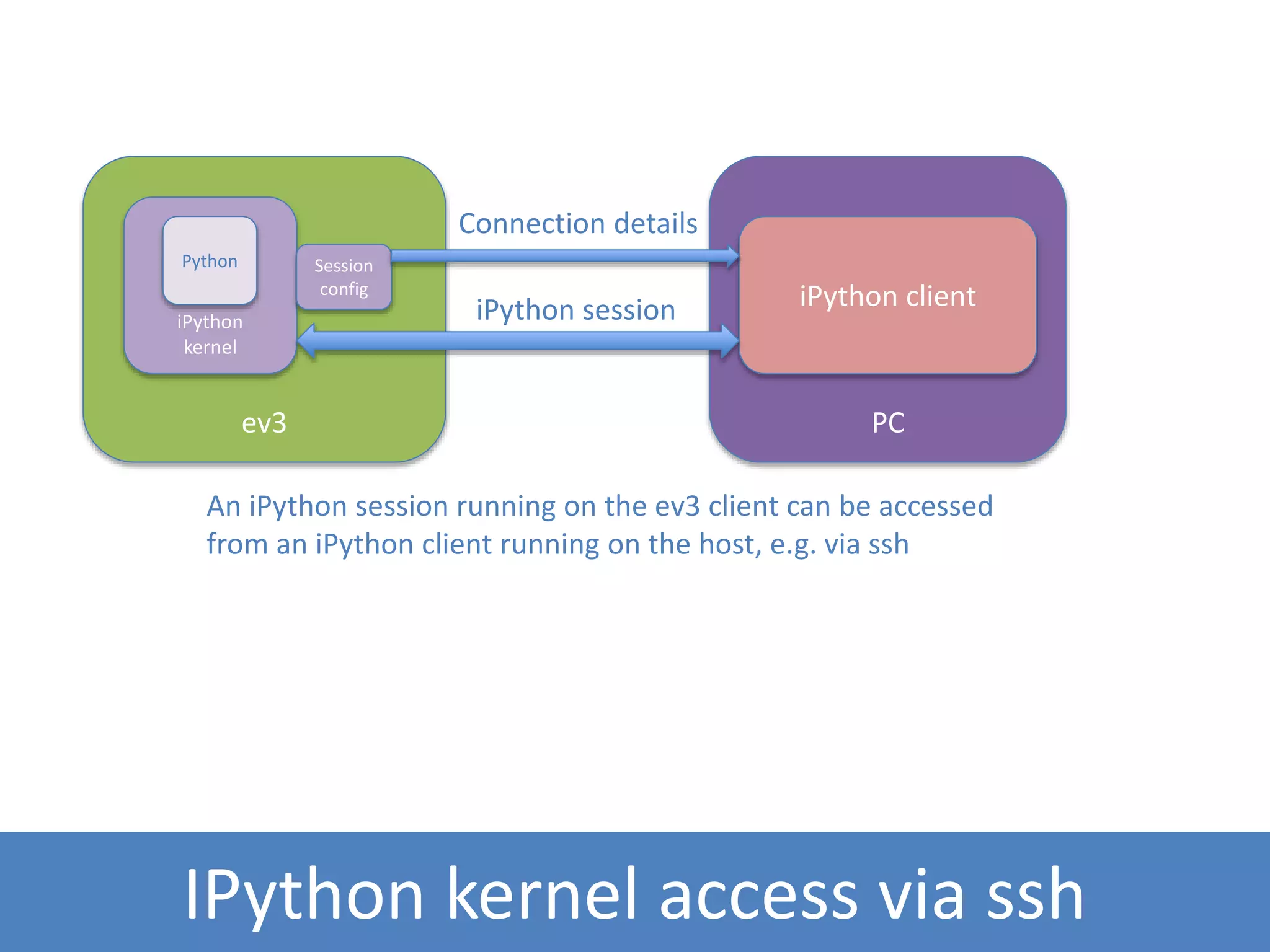

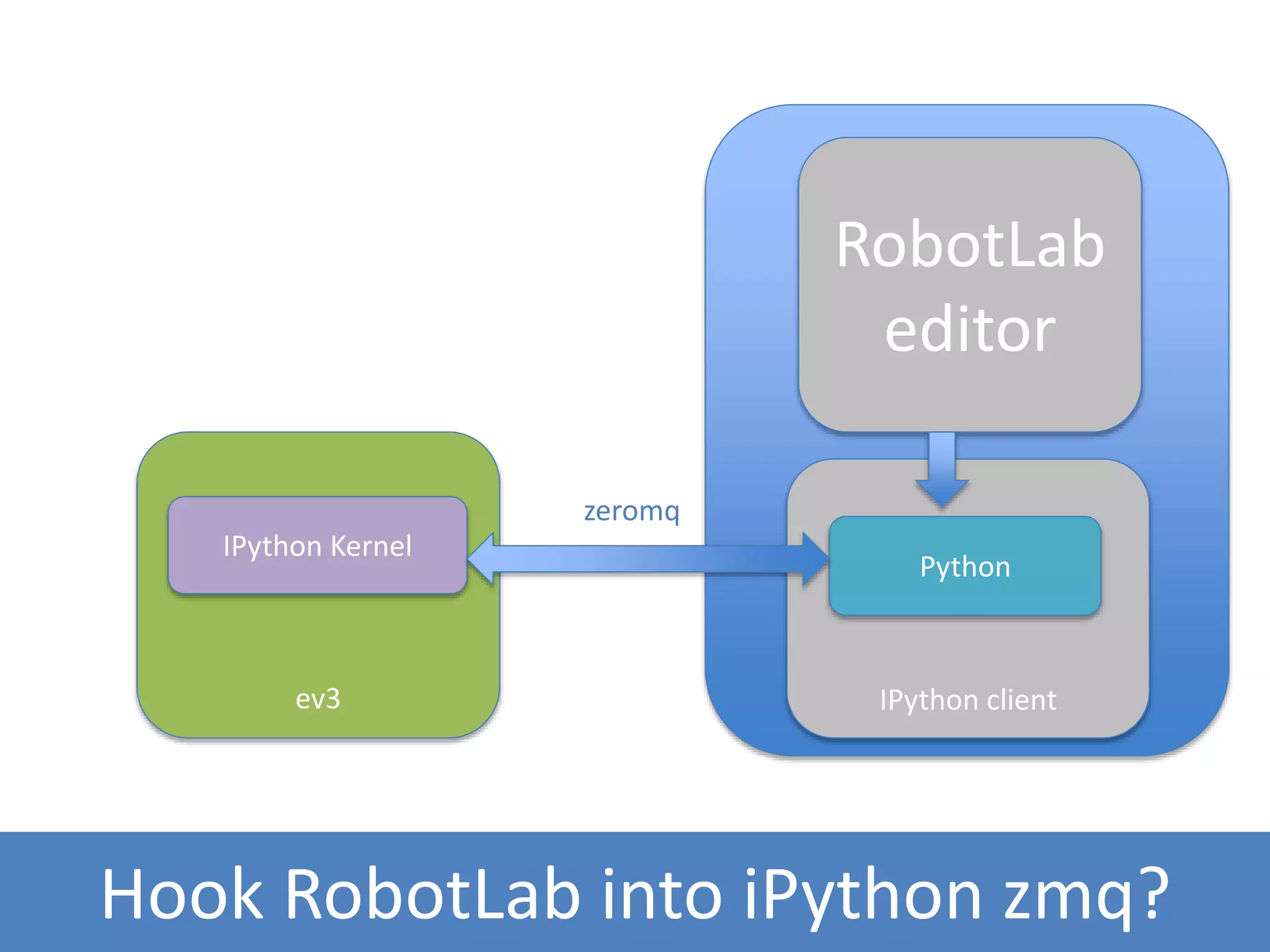
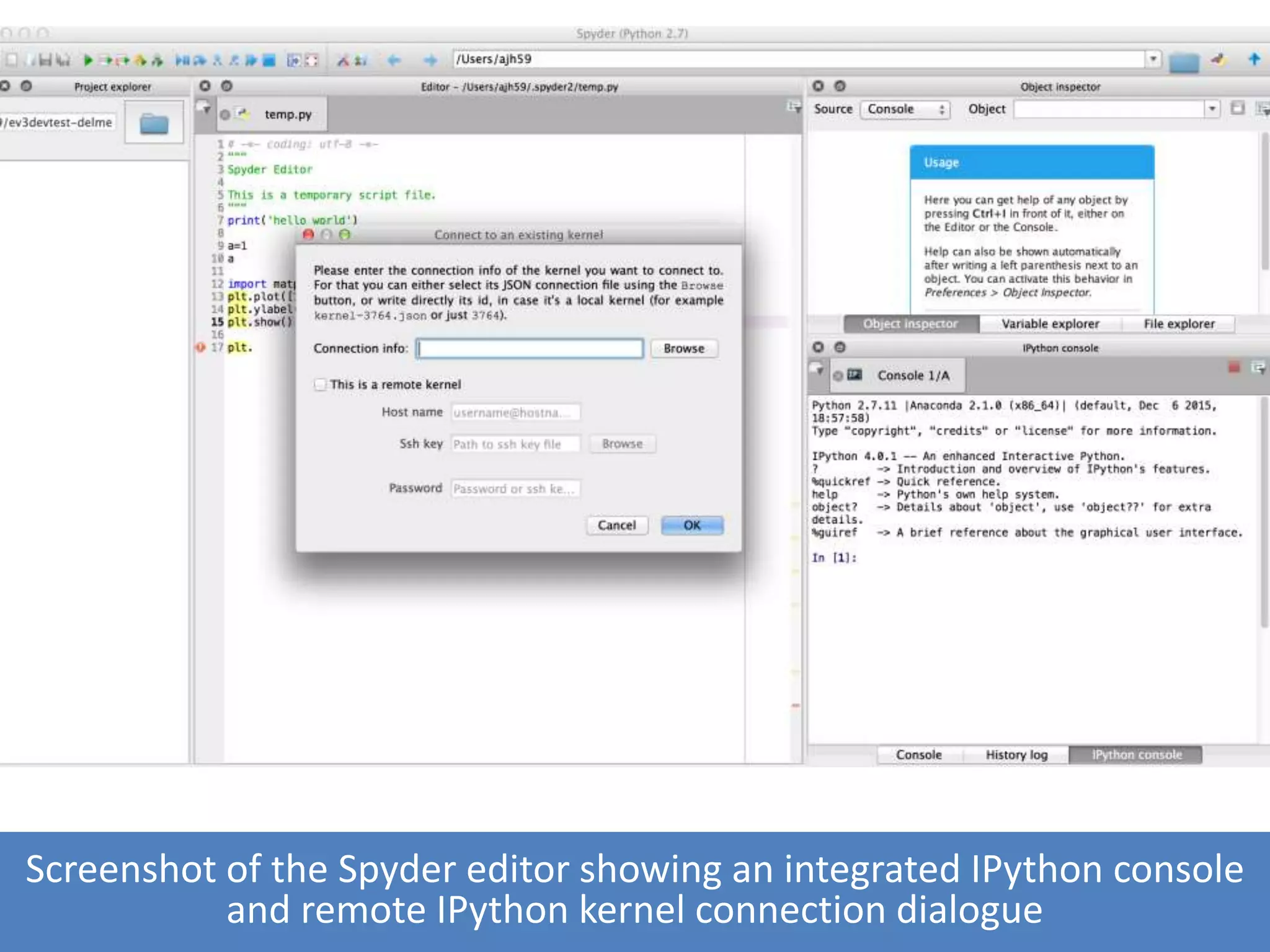
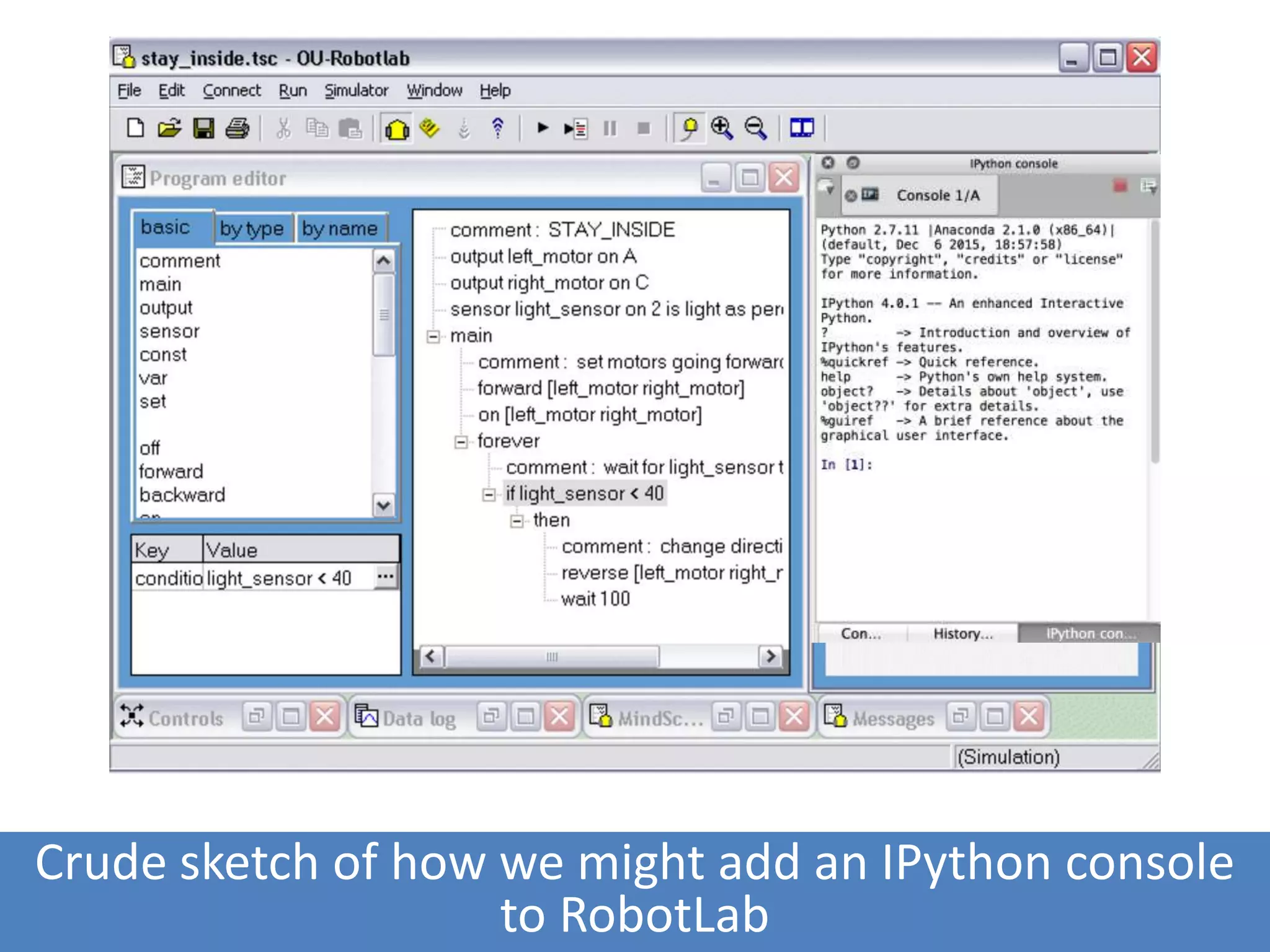
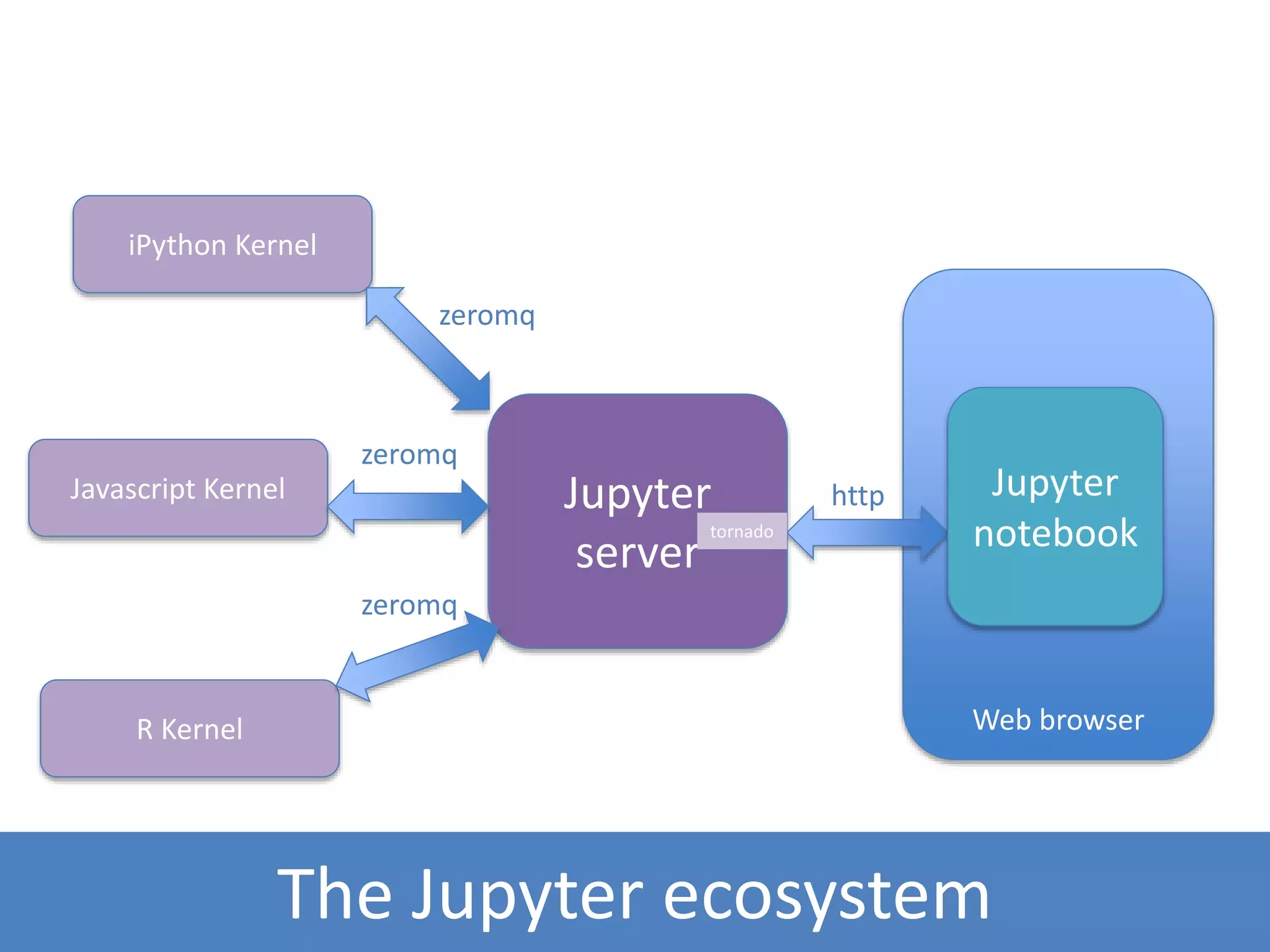
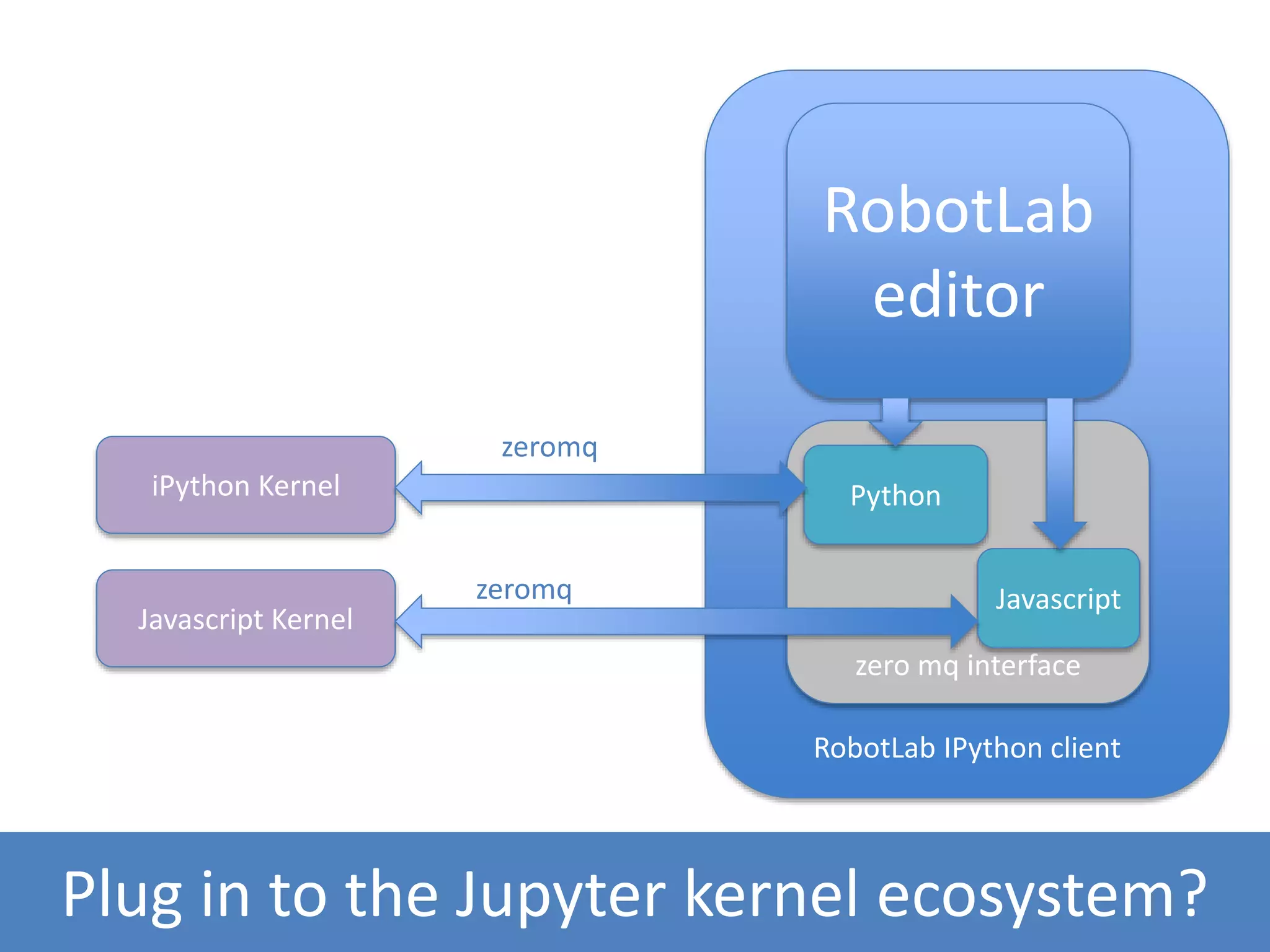
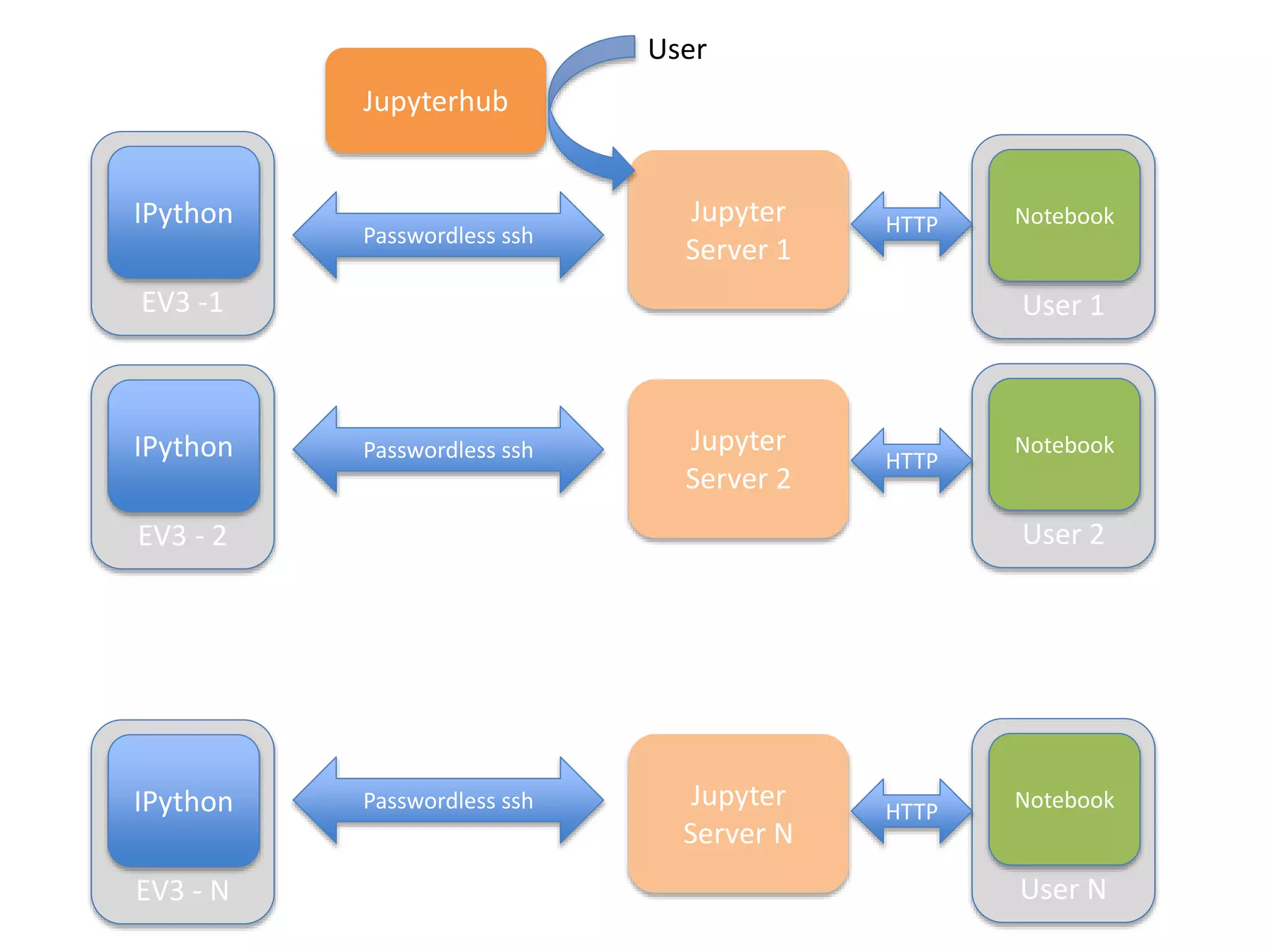

This document discusses setting up a residential robotics school with multiple EV3 bricks connected over a wireless network. The bricks would each have an SD card and WiFi card to allow them to be programmed from PCs running RobotLab software. Considerations include giving each brick a static IP or domain name for easy identification. An interactive tablet interface is suggested. The EV3 bricks run a Debian-based ev3dev operating system and support running Python/IPython scripts from the on-board controls or via SSH from a host PC. Connecting an IPython kernel on the EV3 to clients like Jupyter notebooks on a host PC is described. Integrating RobotLab with the Jupyter/IPython ecosystem to allow programming robots from a web browser



































































