Downloaded 49 times


The document discusses various feature types and selection methods used in pattern recognition, detailing template matching, structural decomposition, and series expansion as techniques for feature extraction. It also covers different classifier types, including statistical methods, neural networks, and rule-based methods, highlighting their applications in recognizing and classifying patterns. Key processes in a pattern recognition system include data acquisition, pre-processing, feature extraction, model learning, classification, and optional post-processing to enhance performance.
Overview of the training course focus on pattern recognition methods and types of features.
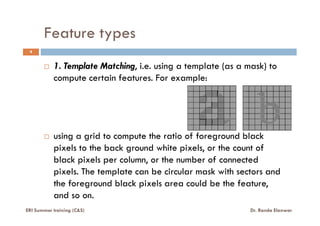
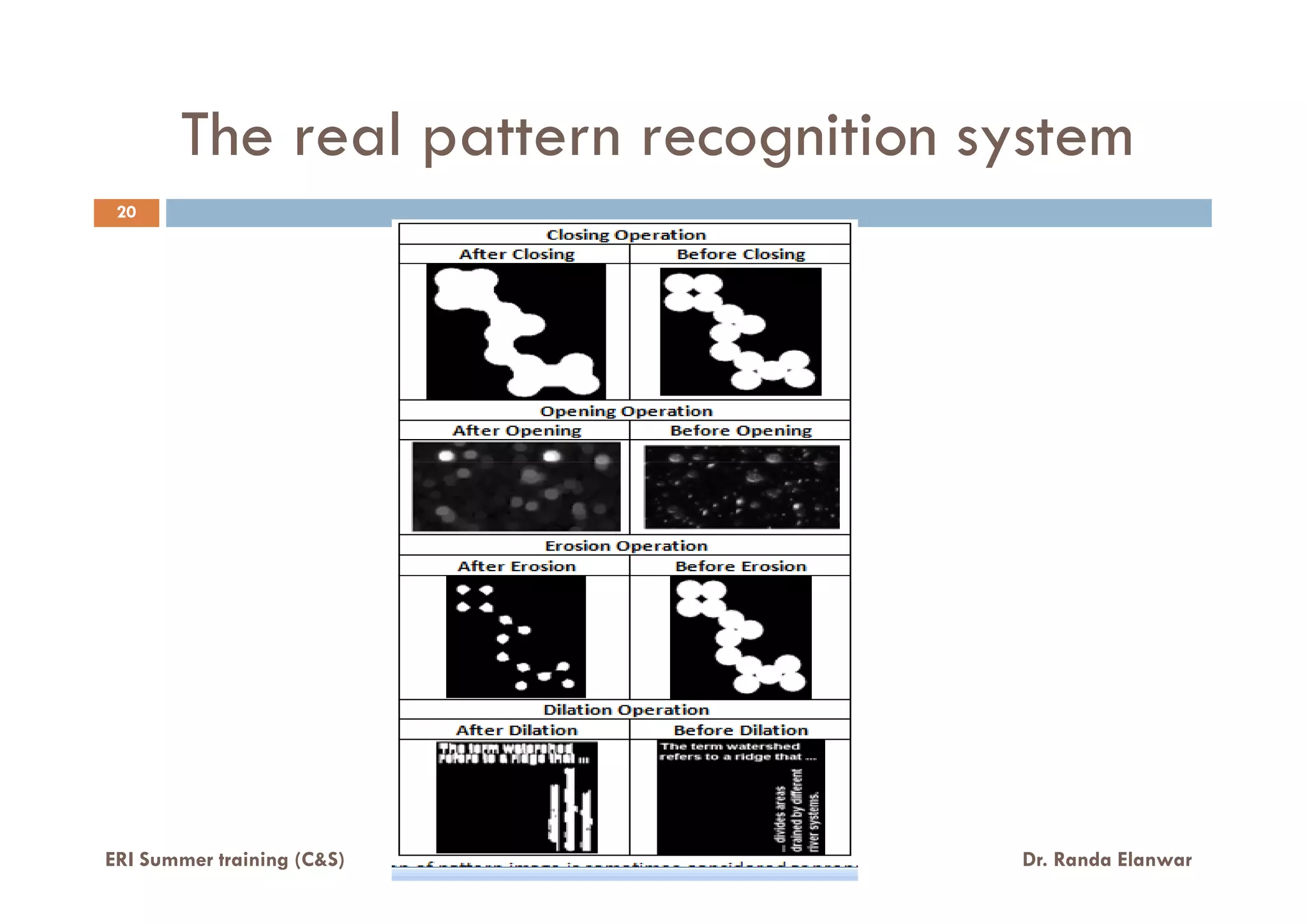
Discusses template matching, structural decomposition, and series expansion as feature extraction methods.
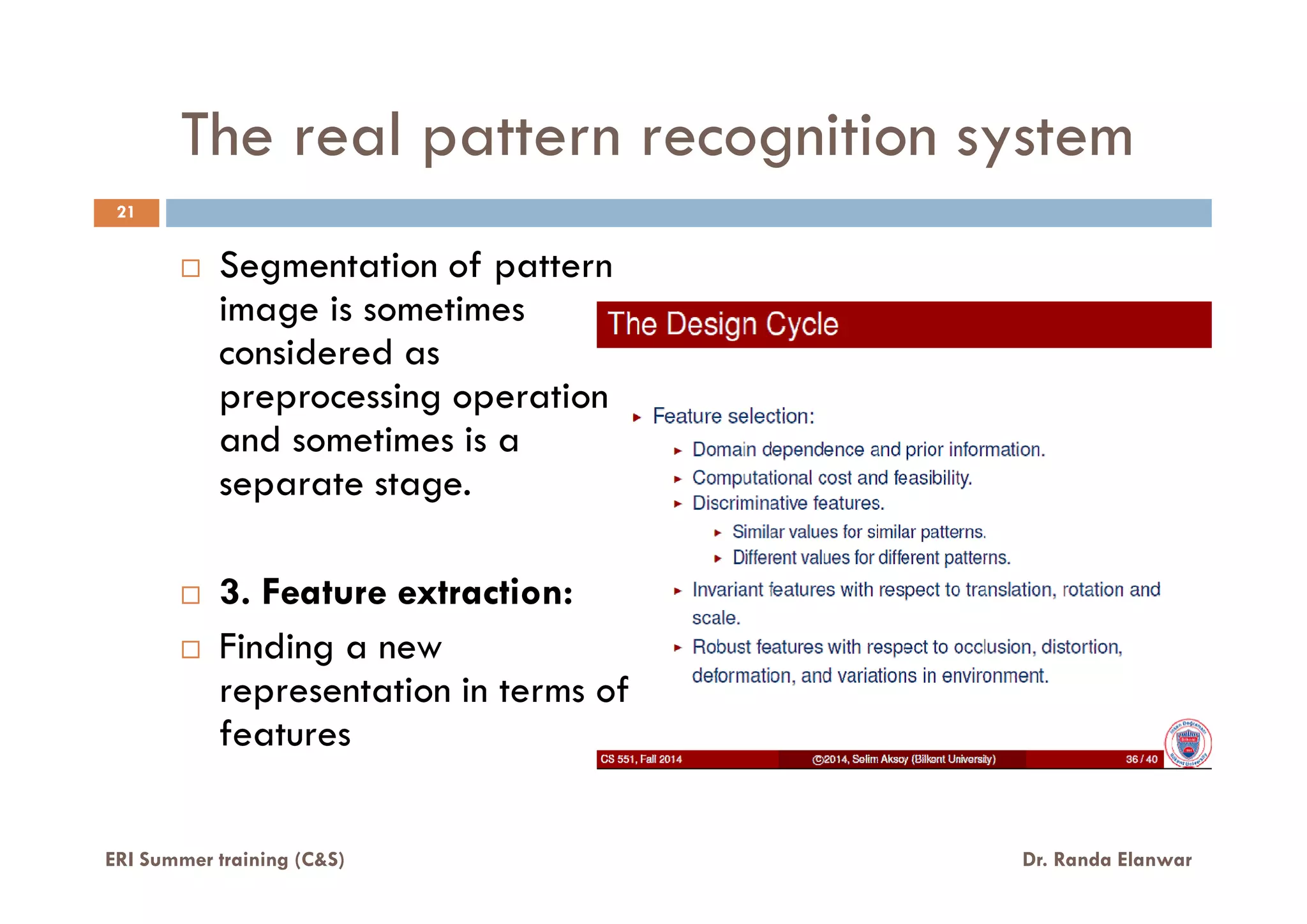
Overview of techniques for selecting features that optimize classification results, including various selection strategies.
Explores various classifier types such as template matching, statistical methods, and stochastic processes.
Details on structural matching and rule-based methods for pattern recognition, emphasizing their unique applications.
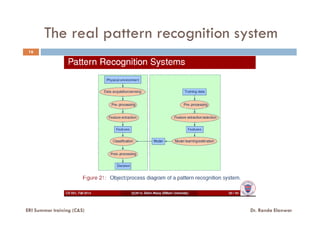
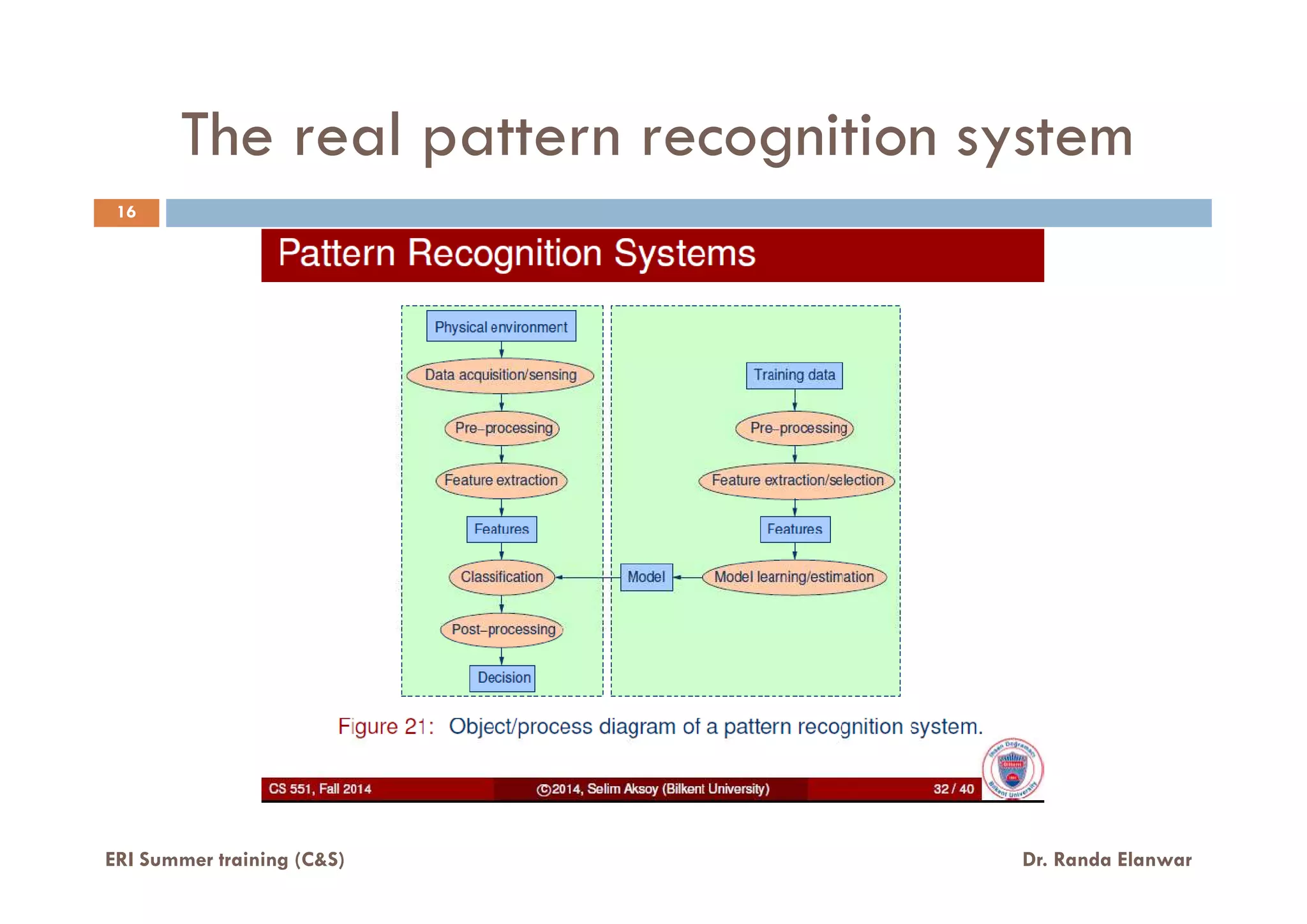
Describes the components of a complete pattern recognition system including data acquisition, preprocessing, feature extraction, model learning, classification, and post-processing.











































































































