0% found this document useful (0 votes)
60 views31 pagesVerilog Interview Qs
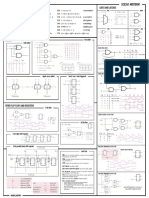
The document provides a comprehensive collection of Verilog code examples for various digital design components, including a half-adder, multiplexer, flip-flop, ripple carry adder, and more. Each example includes a module definition with inputs, outputs, and the logic implemented using Verilog syntax. The document serves as a resource for mastering Verilog through practical coding exercises and implementations.
Uploaded by
sindhuravemuCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
60 views31 pagesVerilog Interview Qs
The document provides a comprehensive collection of Verilog code examples for various digital design components, including a half-adder, multiplexer, flip-flop, ripple carry adder, and more. Each example includes a module definition with inputs, outputs, and the logic implemented using Verilog syntax. The document serves as a resource for mastering Verilog through practical coding exercises and implementations.
Uploaded by
sindhuravemuCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
/ 31