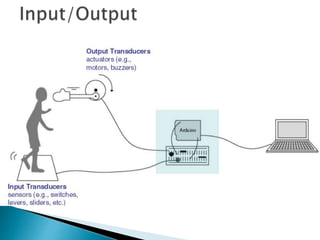
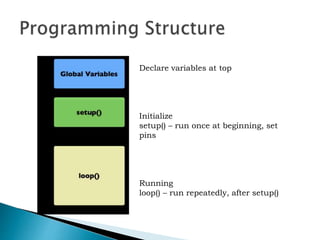
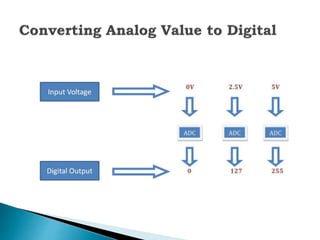
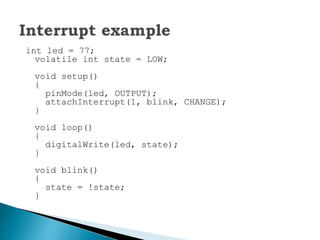
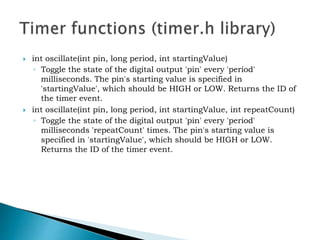
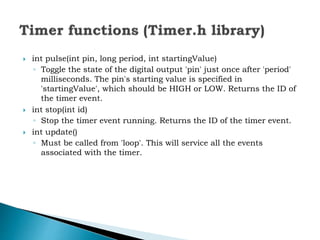
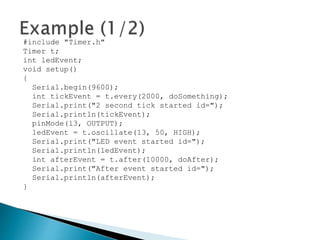
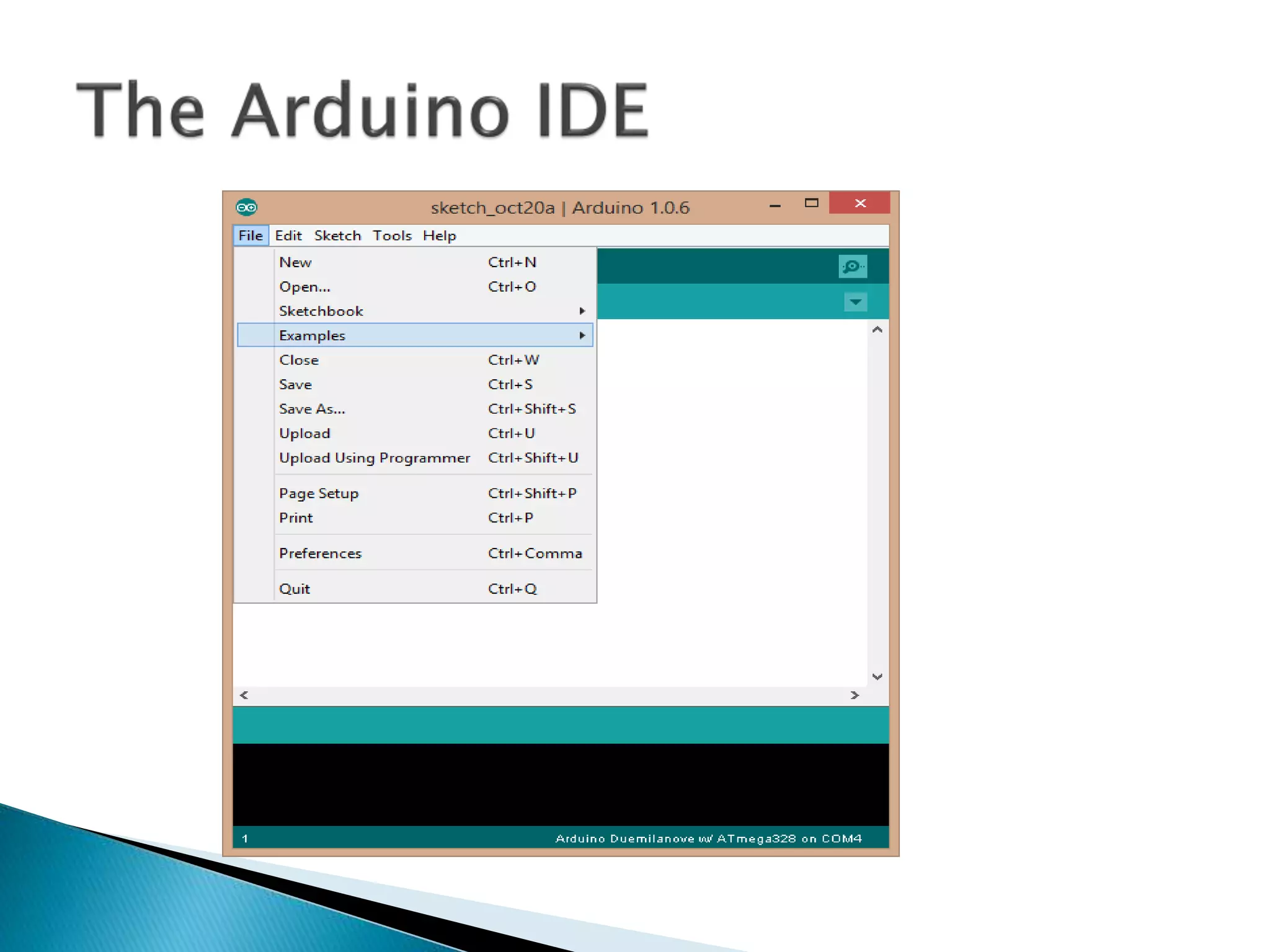
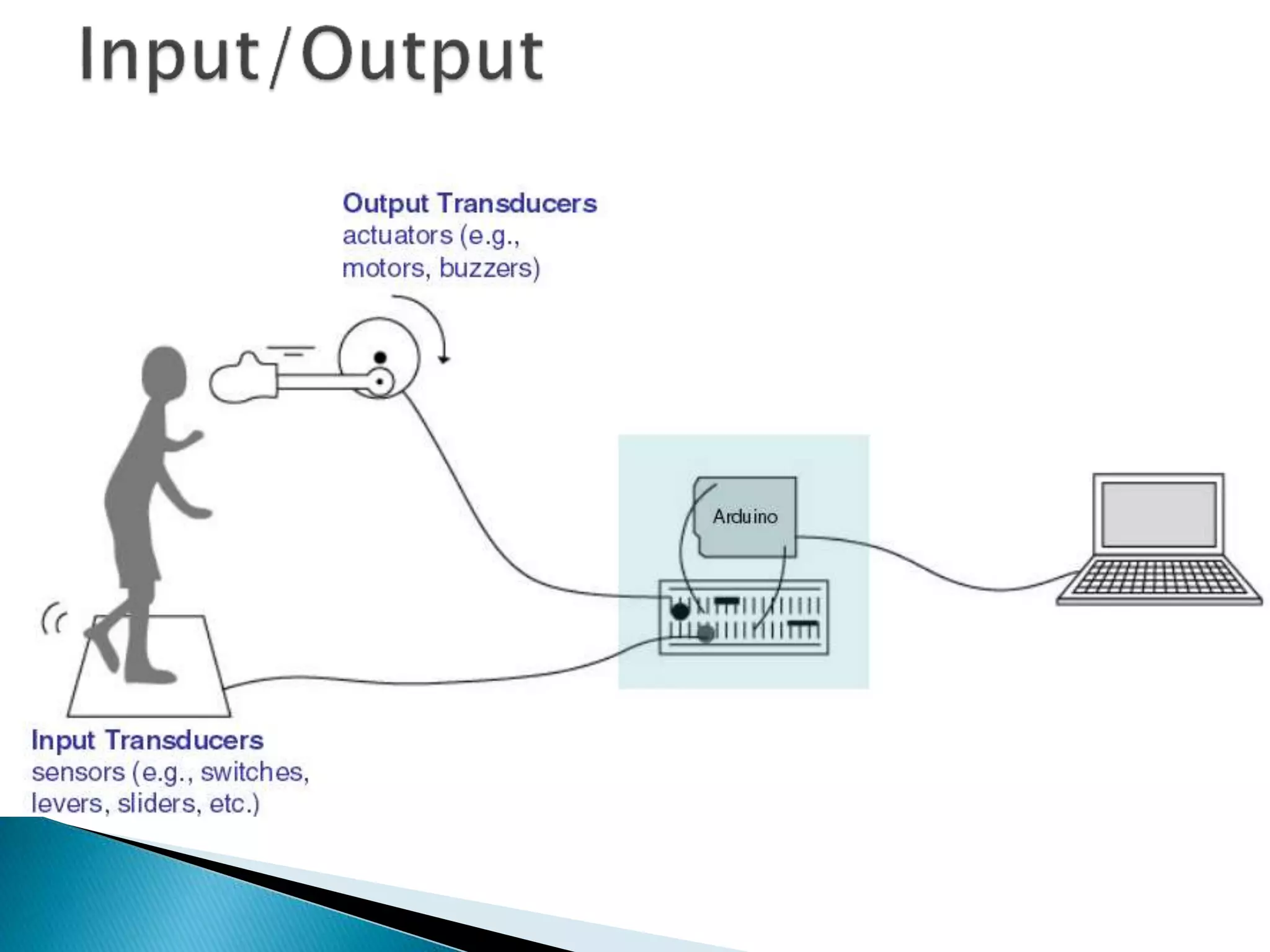
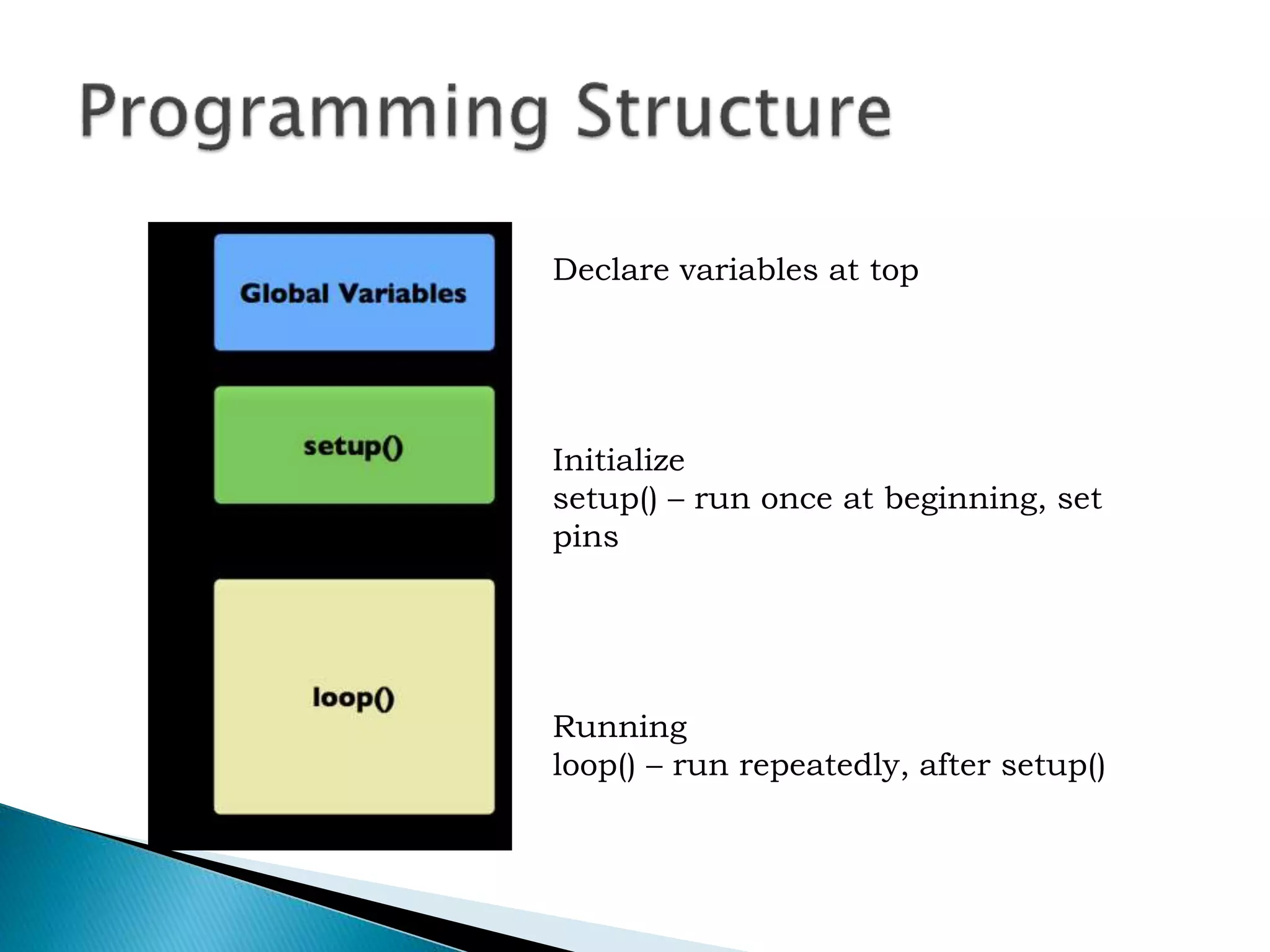
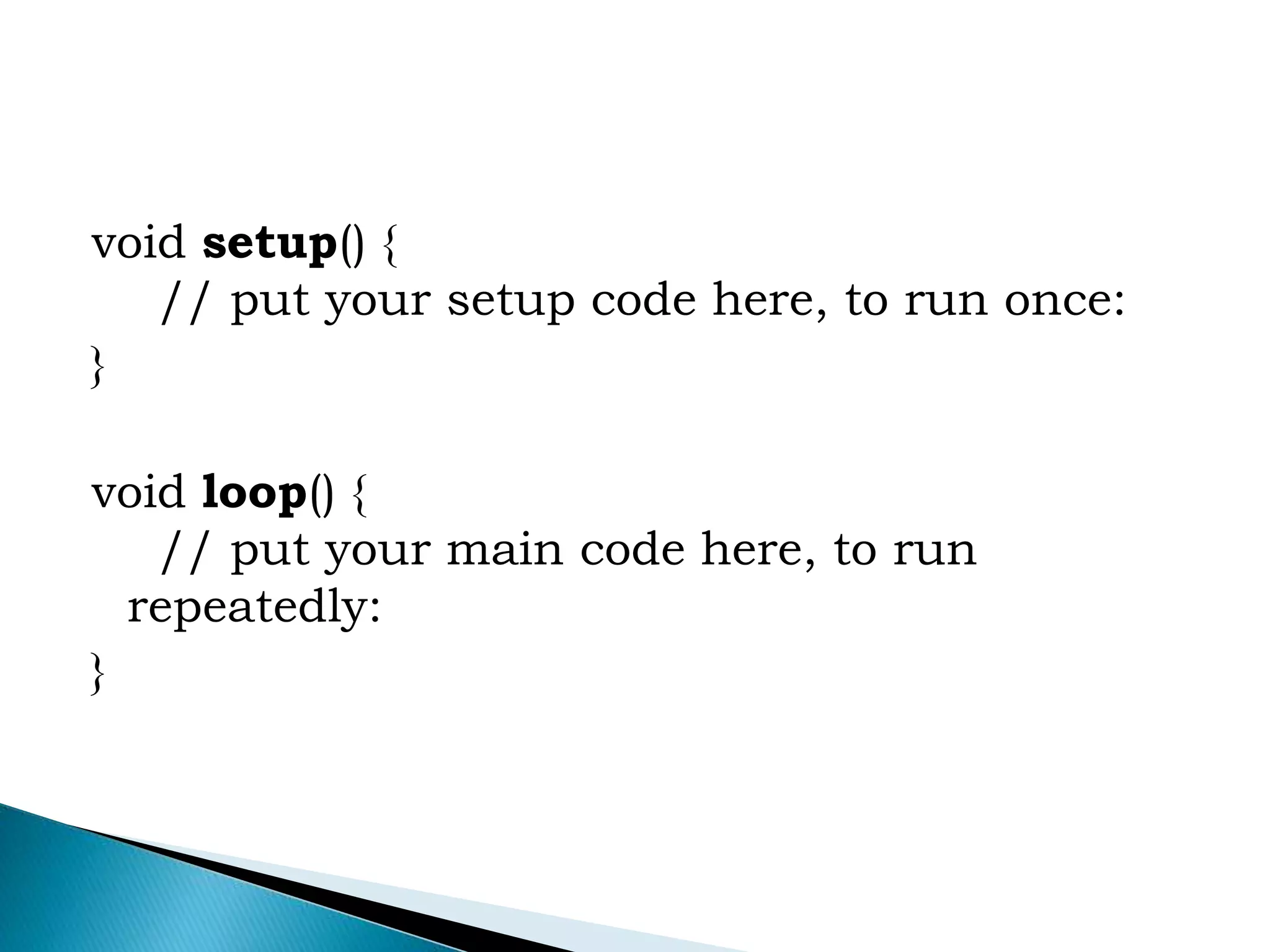
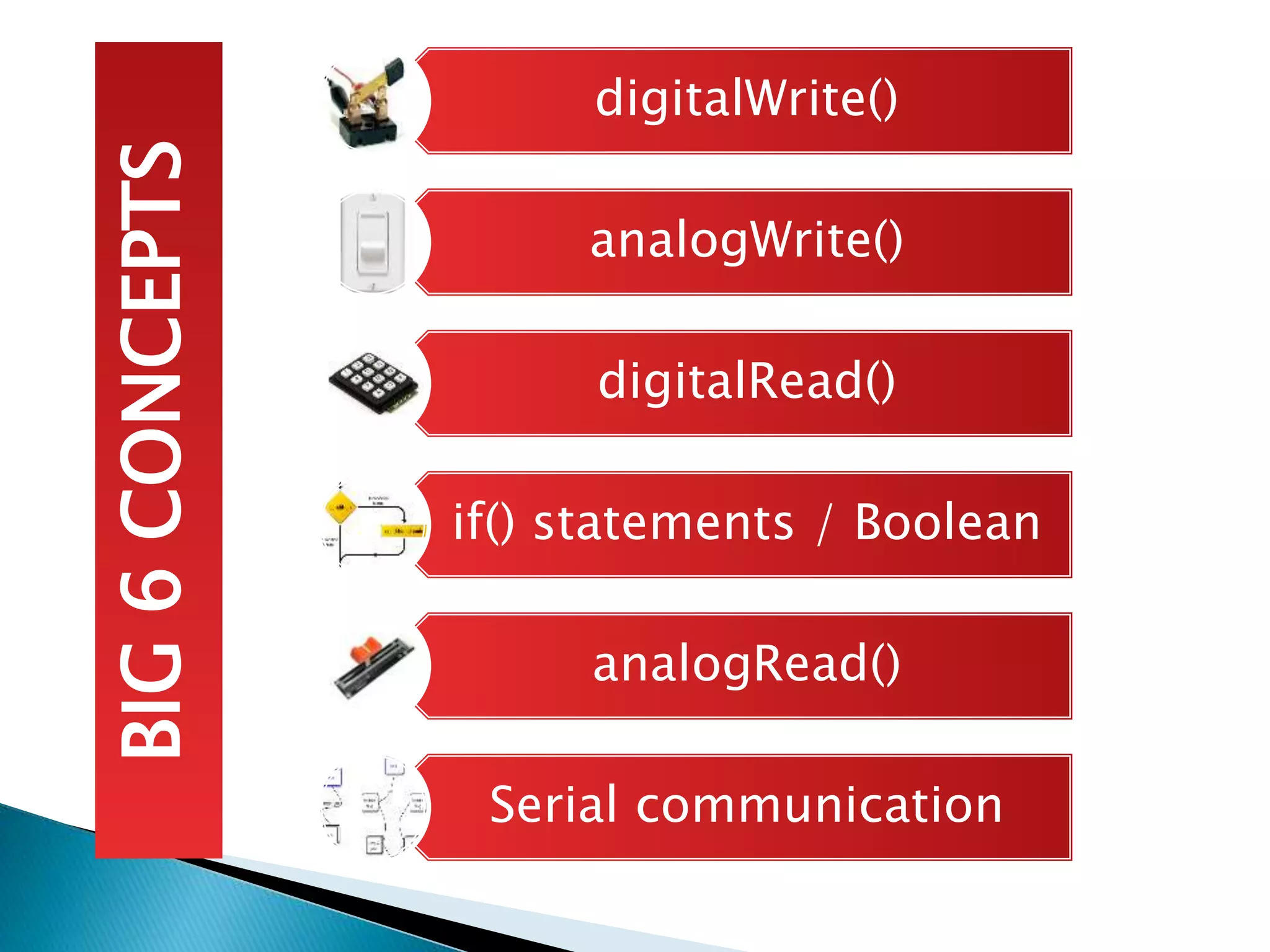
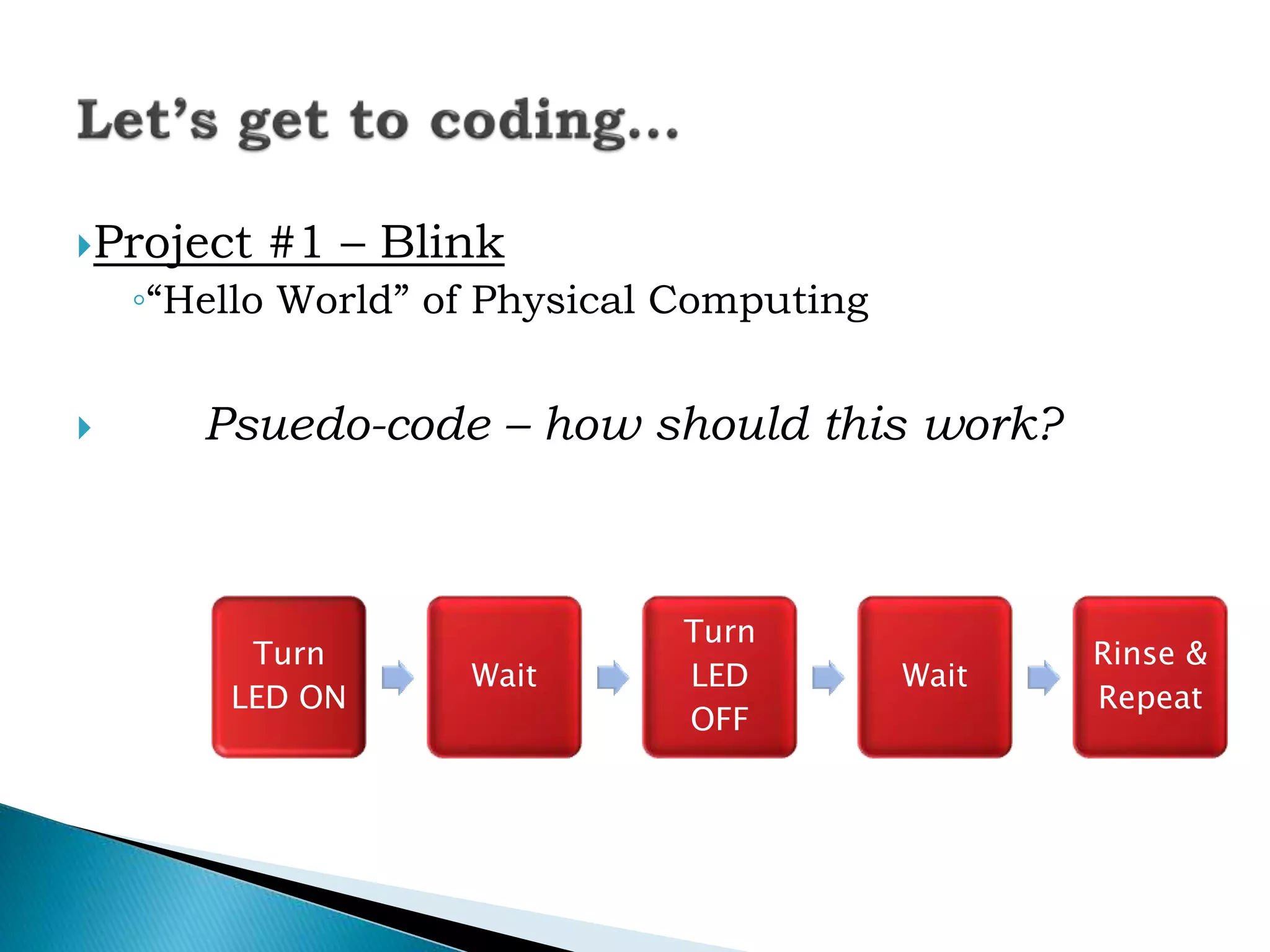
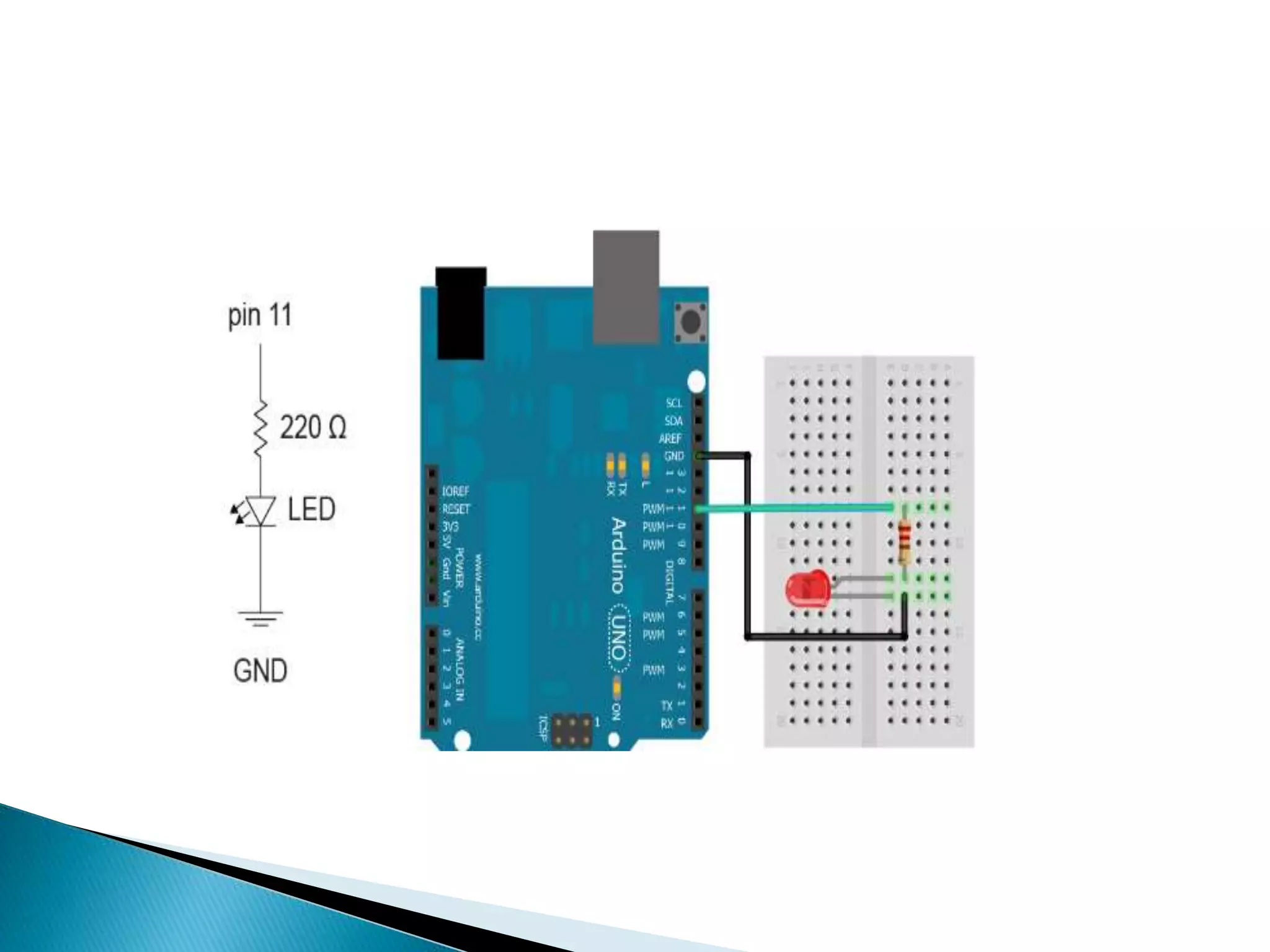
The document provides an overview of topics related to interfacing sensors and actuators with Arduino microcontrollers. It discusses basic I/O components, sensor interfacing including ultrasonic, IR, temperature and motion sensors. It also covers actuators, motor control, LCD displays and programming concepts for Arduino like digital and analog I/O, PWM and interrupts. References for further reading on Arduino programming are also provided.