Download as PDF, PPTX
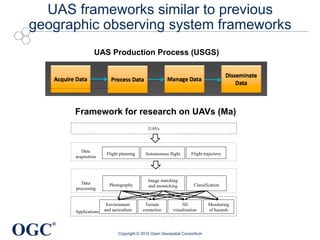
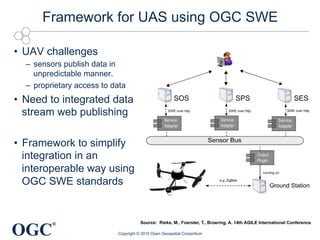
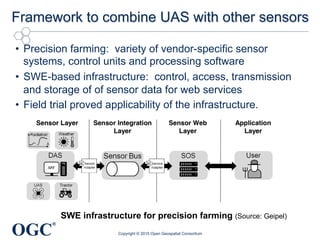
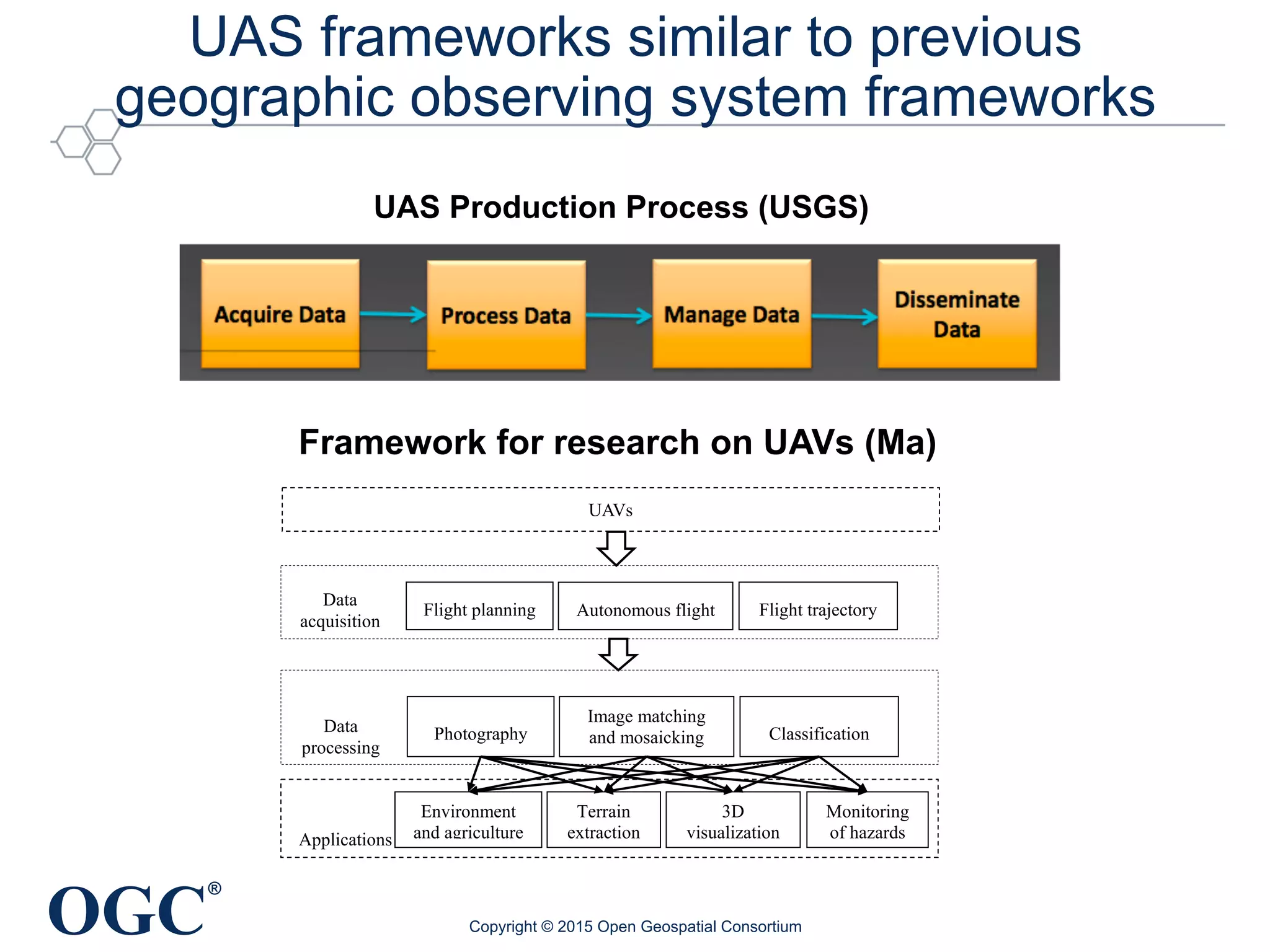
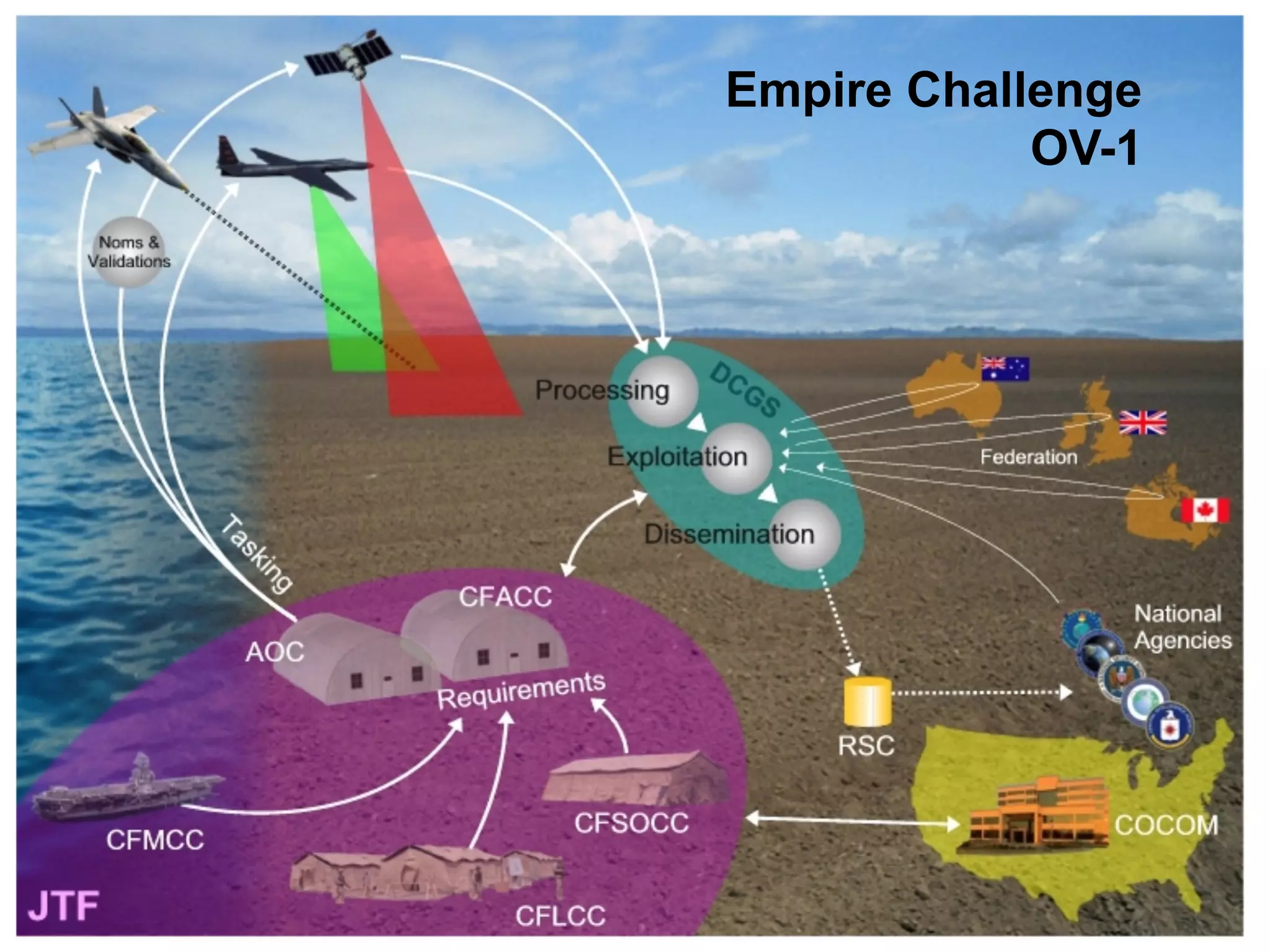

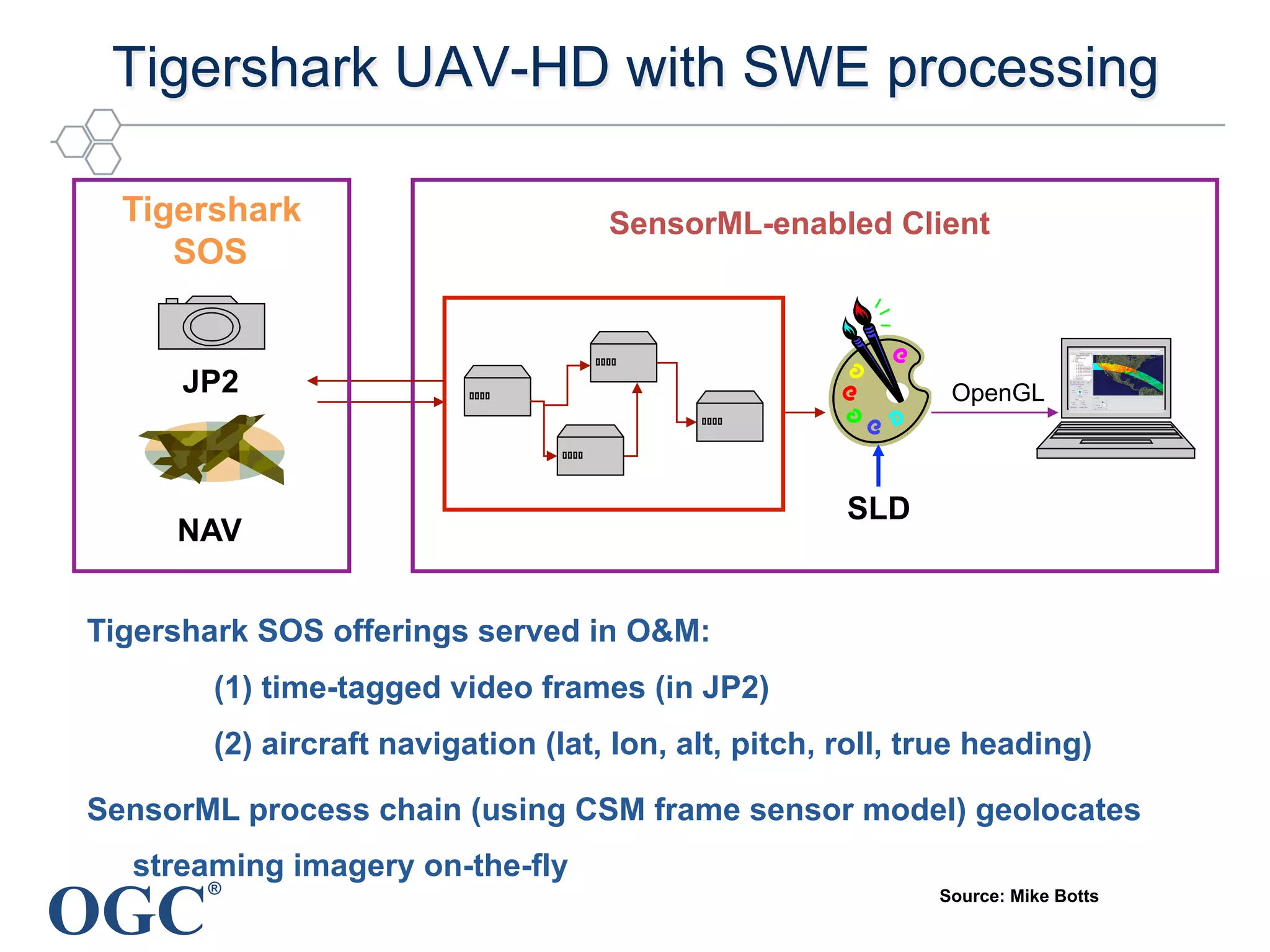
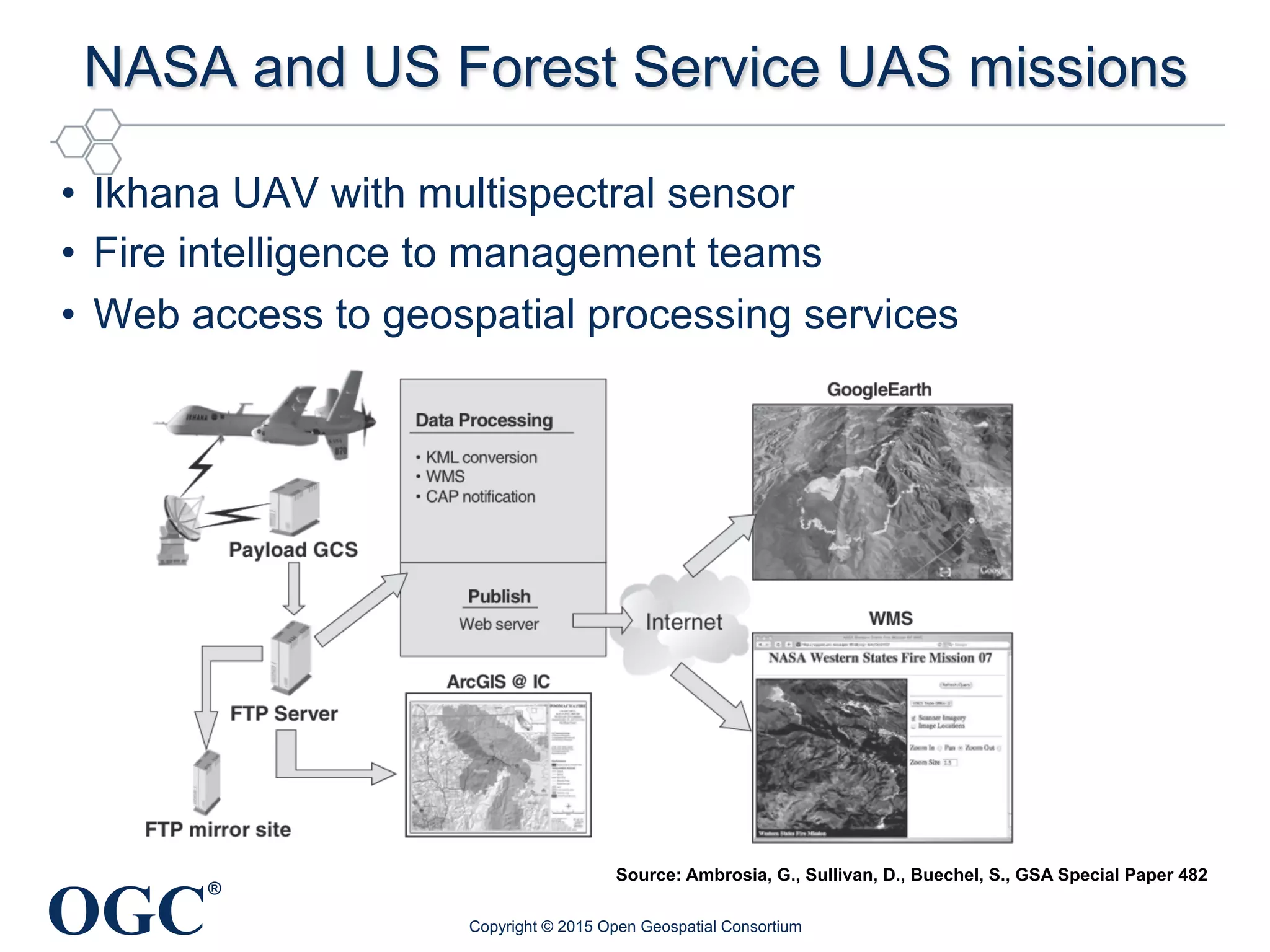
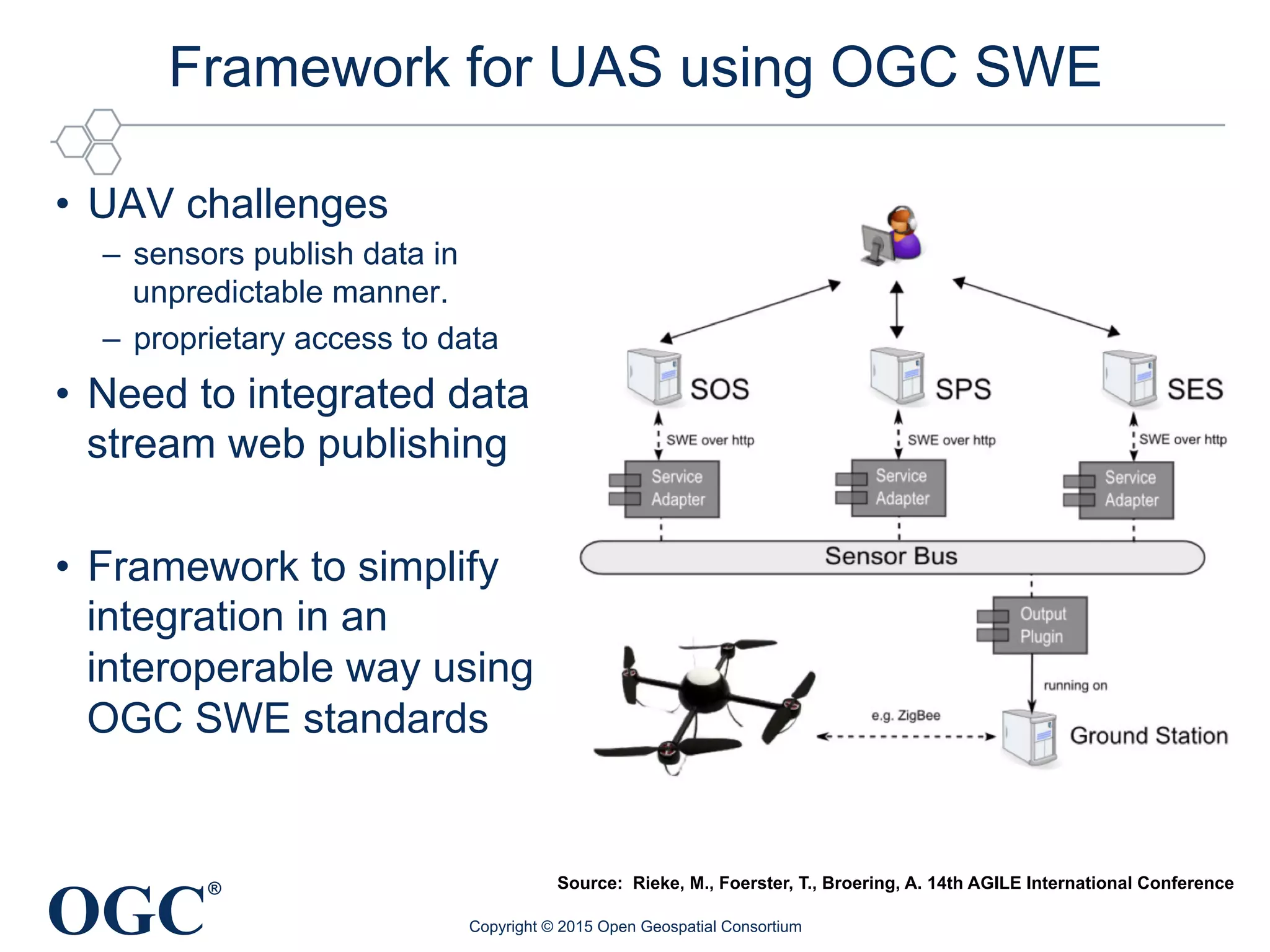
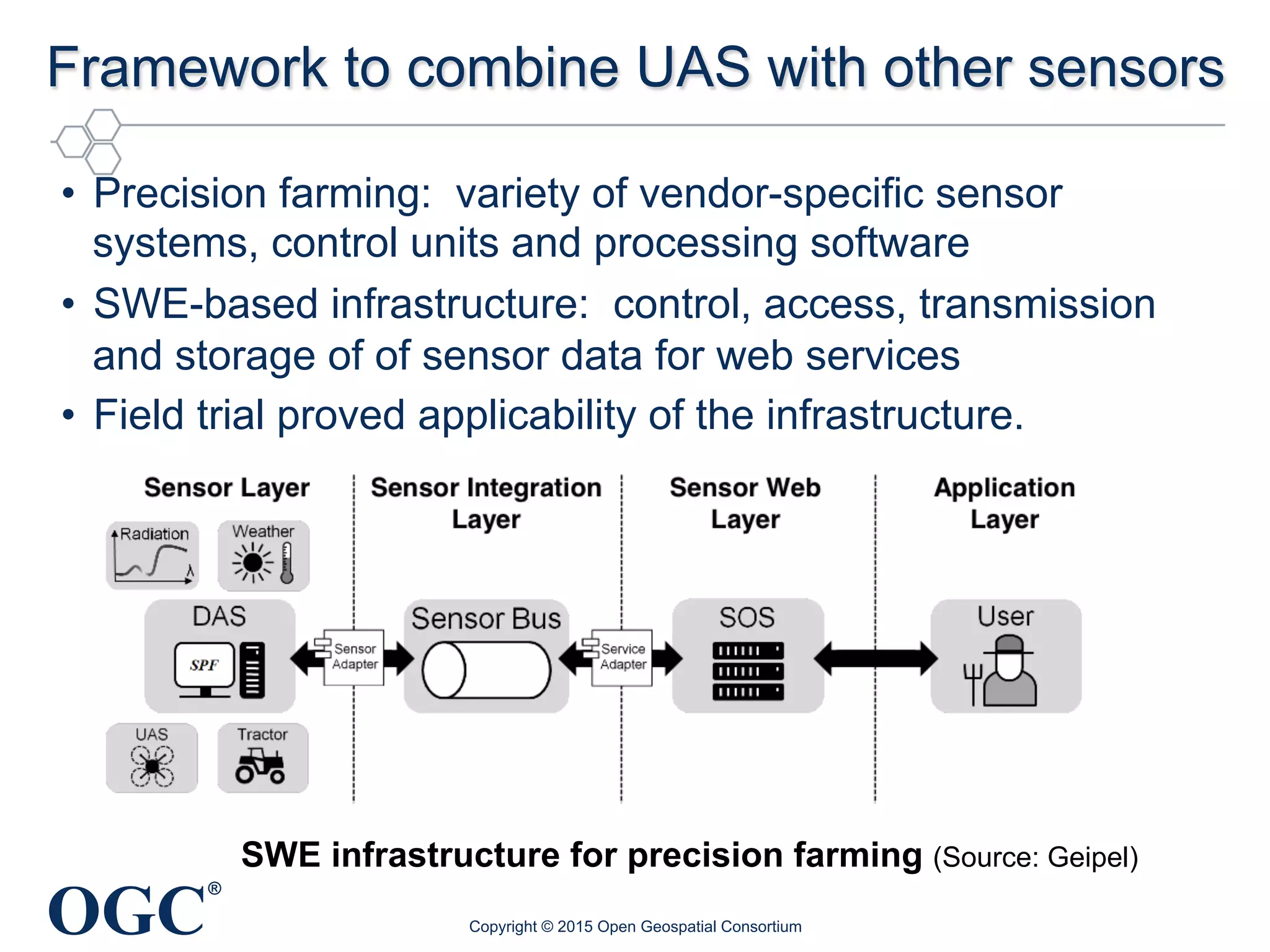
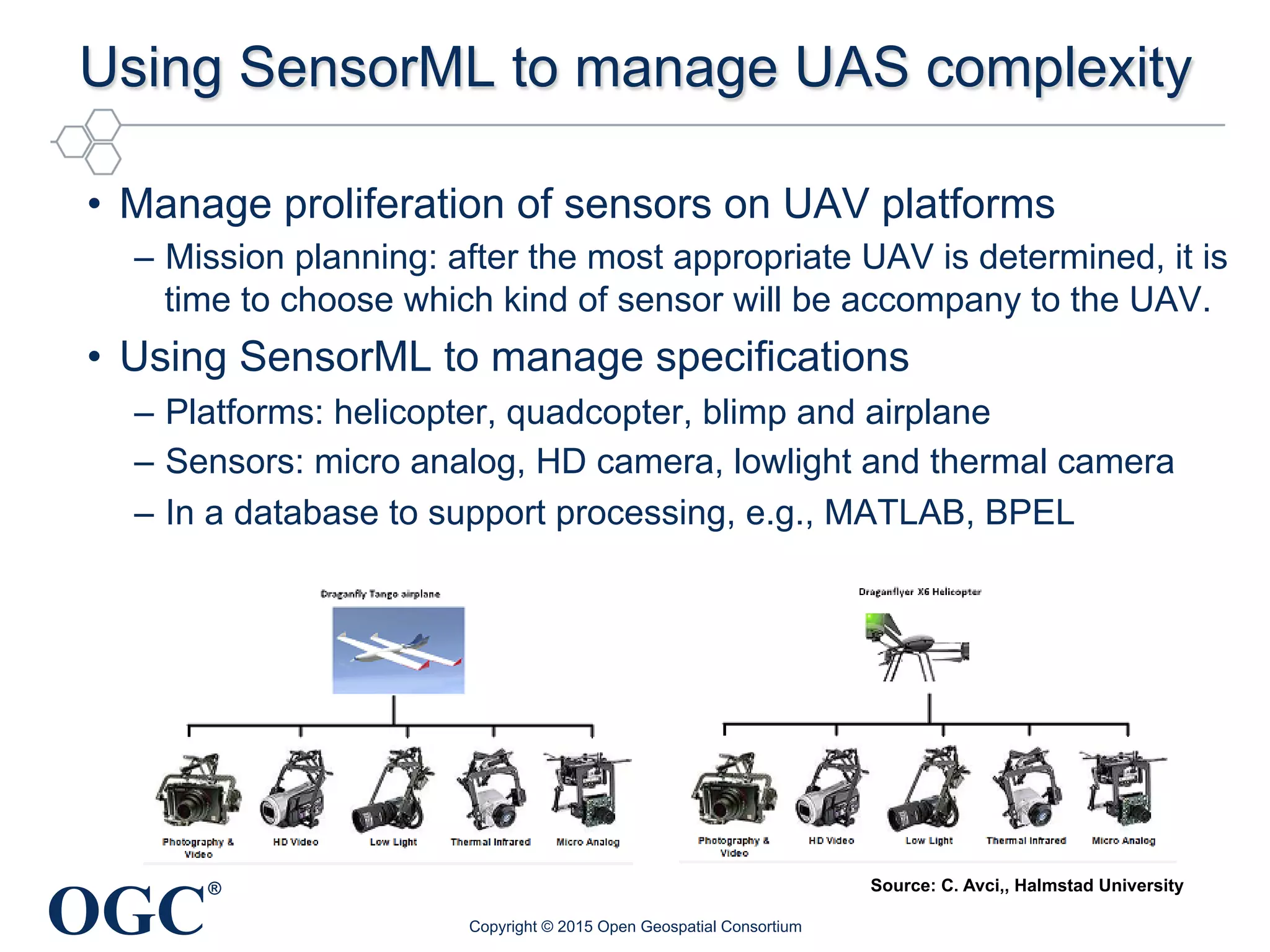
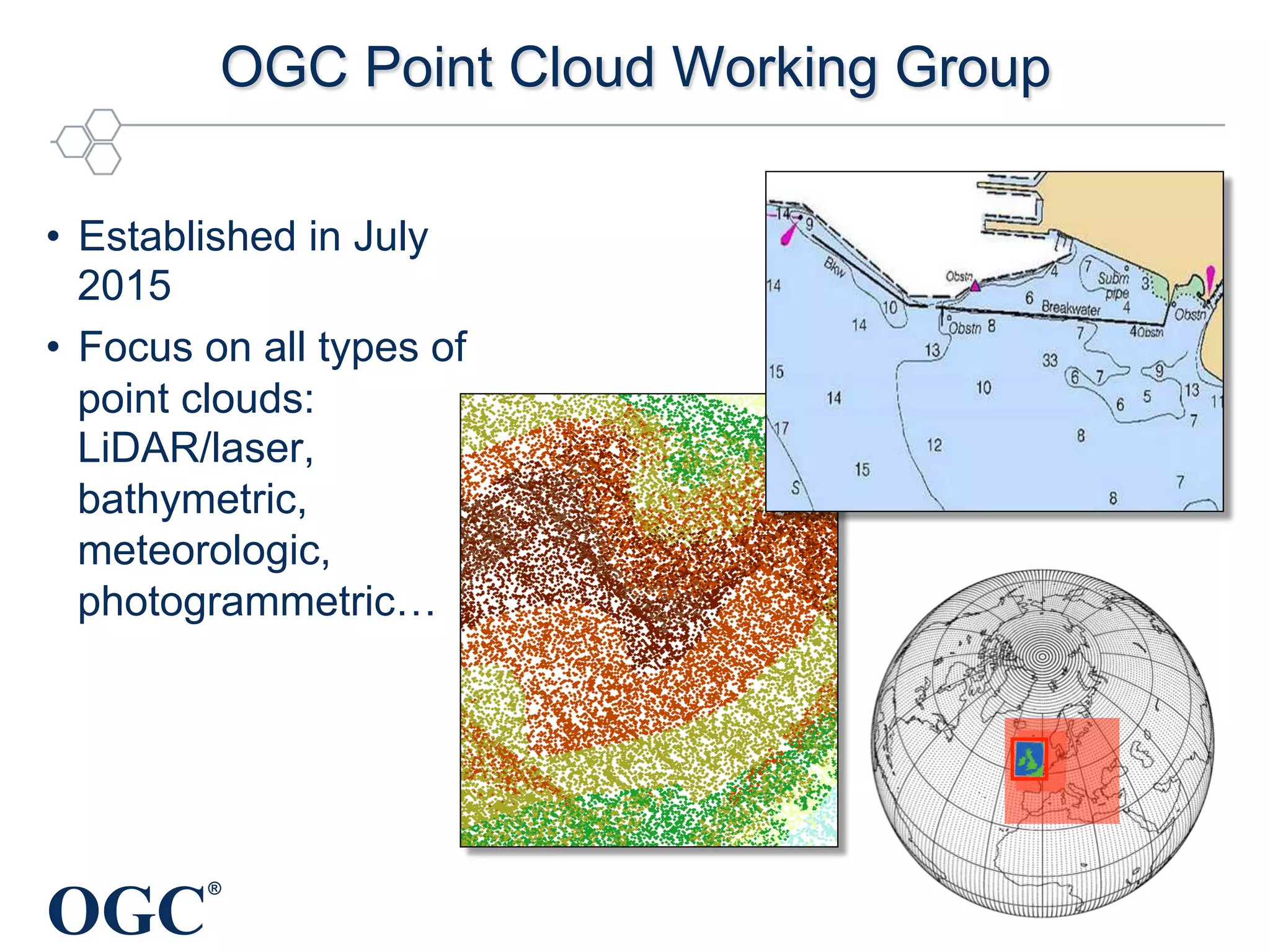

The document discusses a common approach for Unmanned Aerial Systems (UAS) data geoprocessing, highlighting the benefits of using existing geographic standards to address unique challenges related to UAV technology. It emphasizes the need for standardization across sensors and platforms to ensure interoperability and effective data processing. Additionally, it outlines the importance of open standards in facilitating the integration of various data sources, thus enhancing the usability and efficiency of UAV-derived geospatial information.






















































































