Dynamic programming is an algorithm design technique for optimization problems that reduces time by increasing space usage. It works by breaking problems down into overlapping subproblems and storing the solutions to subproblems, rather than recomputing them, to build up the optimal solution. The key aspects are identifying the optimal substructure of problems and handling overlapping subproblems in a bottom-up manner using tables. Examples that can be solved with dynamic programming include the knapsack problem, shortest paths, and matrix chain multiplication.
TOPIC:
Introduction to dynamicprogramming and
problem solving
BY:
PREYASH MISTRY(160110107029)
NARSINGANI AMISHA(160110107031)
G H Patel College Of Engineering
& Technology, V.V.Nagar
2.
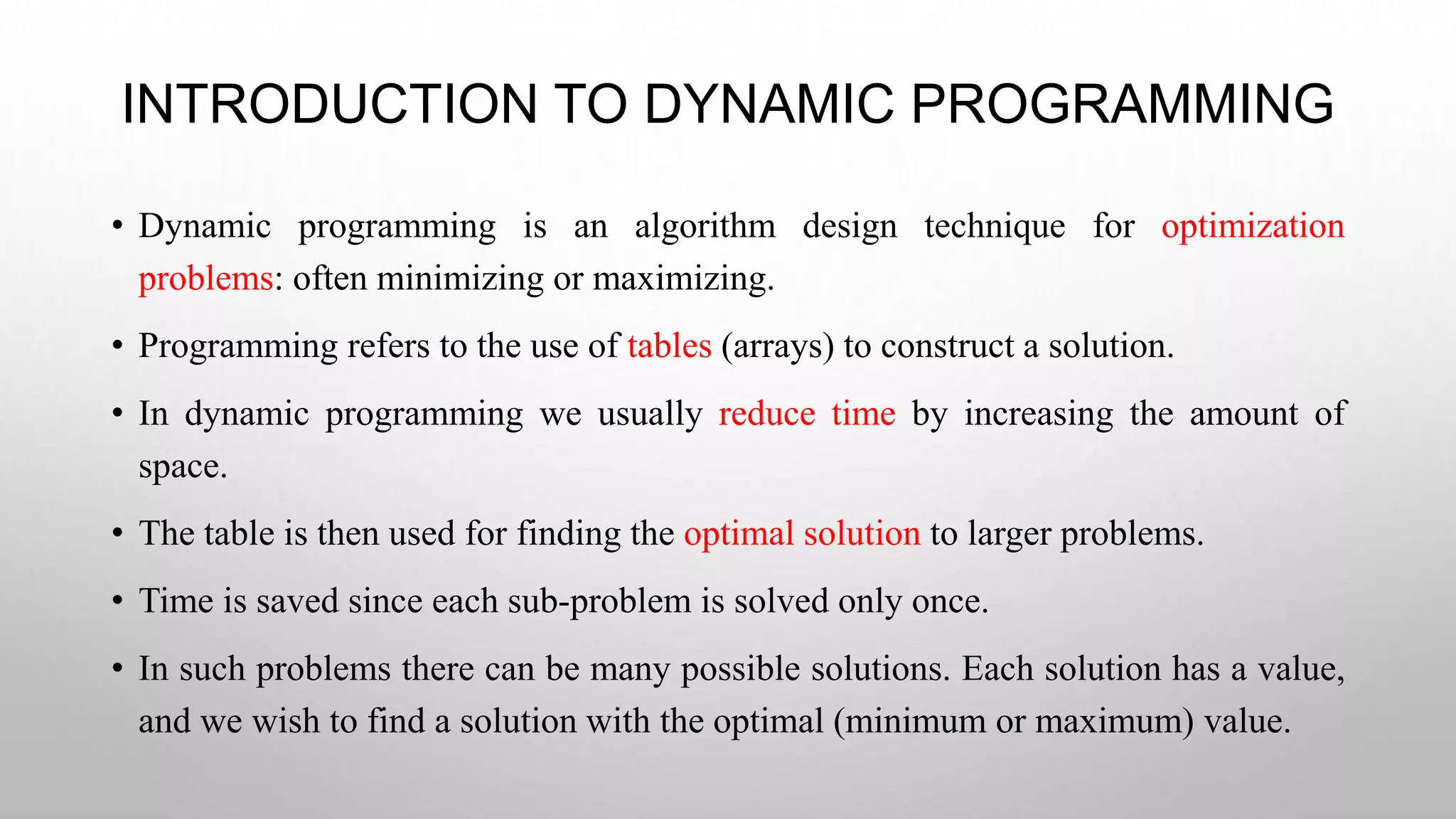
INTRODUCTION TO DYNAMICPROGRAMMING
• Dynamic programming is an algorithm design technique for optimization
problems: often minimizing or maximizing.
• Programming refers to the use of tables (arrays) to construct a solution.
• In dynamic programming we usually reduce time by increasing the amount of
space.
• The table is then used for finding the optimal solution to larger problems.
• Time is saved since each sub-problem is solved only once.
• In such problems there can be many possible solutions. Each solution has a value,
and we wish to find a solution with the optimal (minimum or maximum) value.
3.
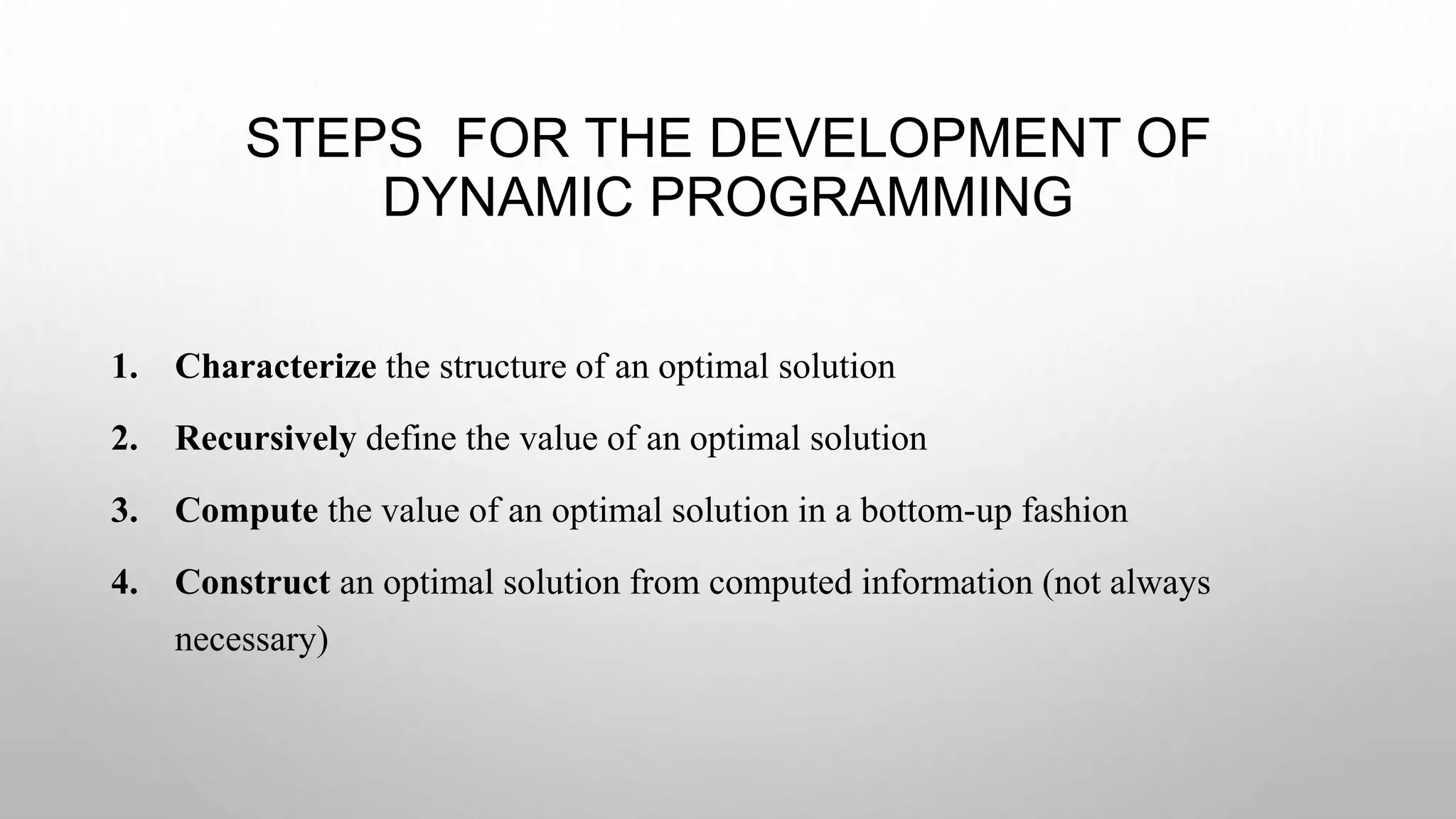
STEPS FOR THEDEVELOPMENT OF
DYNAMIC PROGRAMMING
1. Characterize the structure of an optimal solution
2. Recursively define the value of an optimal solution
3. Compute the value of an optimal solution in a bottom-up fashion
4. Construct an optimal solution from computed information (not always
necessary)
4.
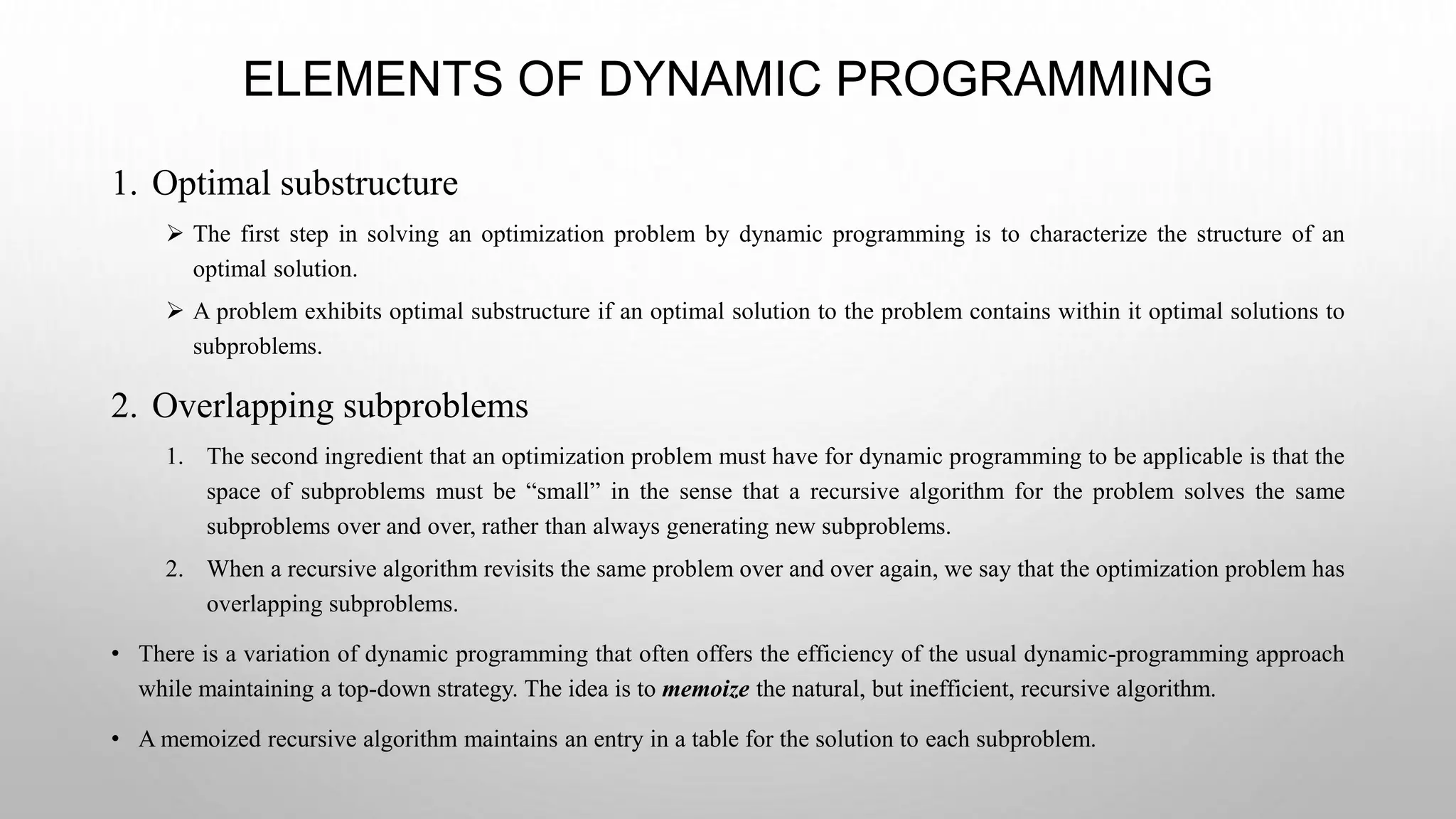
ELEMENTS OF DYNAMICPROGRAMMING
1. Optimal substructure
The first step in solving an optimization problem by dynamic programming is to characterize the structure of an
optimal solution.
A problem exhibits optimal substructure if an optimal solution to the problem contains within it optimal solutions to
subproblems.
2. Overlapping subproblems
1. The second ingredient that an optimization problem must have for dynamic programming to be applicable is that the
space of subproblems must be “small” in the sense that a recursive algorithm for the problem solves the same
subproblems over and over, rather than always generating new subproblems.
2. When a recursive algorithm revisits the same problem over and over again, we say that the optimization problem has
overlapping subproblems.
• There is a variation of dynamic programming that often offers the efficiency of the usual dynamic-programming approach
while maintaining a top-down strategy. The idea is to memoize the natural, but inefficient, recursive algorithm.
• A memoized recursive algorithm maintains an entry in a table for the solution to each subproblem.
5.
5
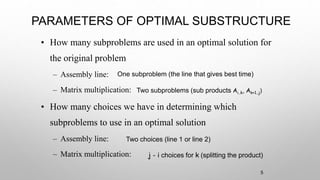
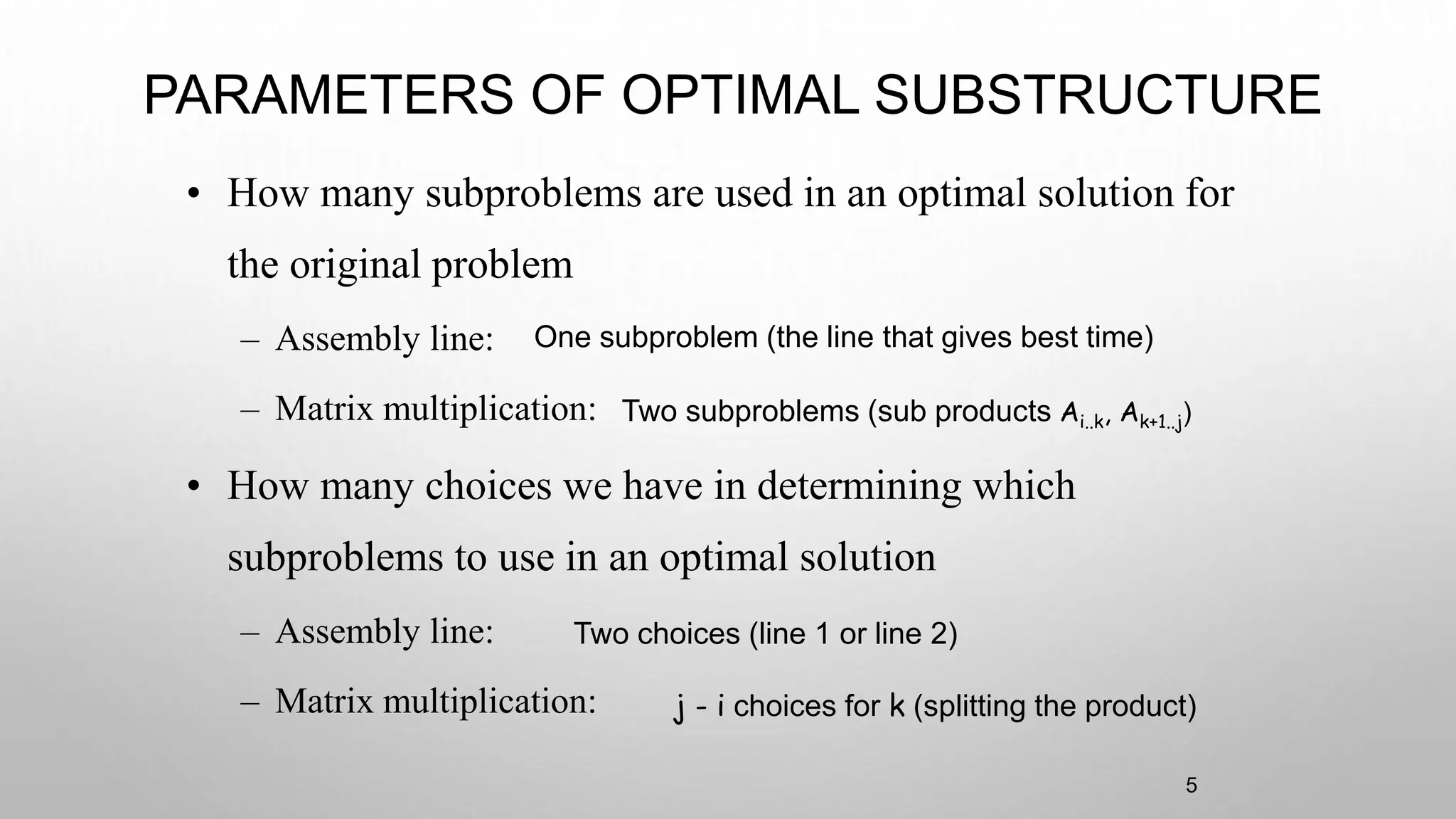
PARAMETERS OF OPTIMALSUBSTRUCTURE
• How many subproblems are used in an optimal solution for
the original problem
– Assembly line:
– Matrix multiplication:
• How many choices we have in determining which
subproblems to use in an optimal solution
– Assembly line:
– Matrix multiplication:
One subproblem (the line that gives best time)
Two choices (line 1 or line 2)
Two subproblems (sub products Ai..k, Ak+1..j)
j - i choices for k (splitting the product)
6.
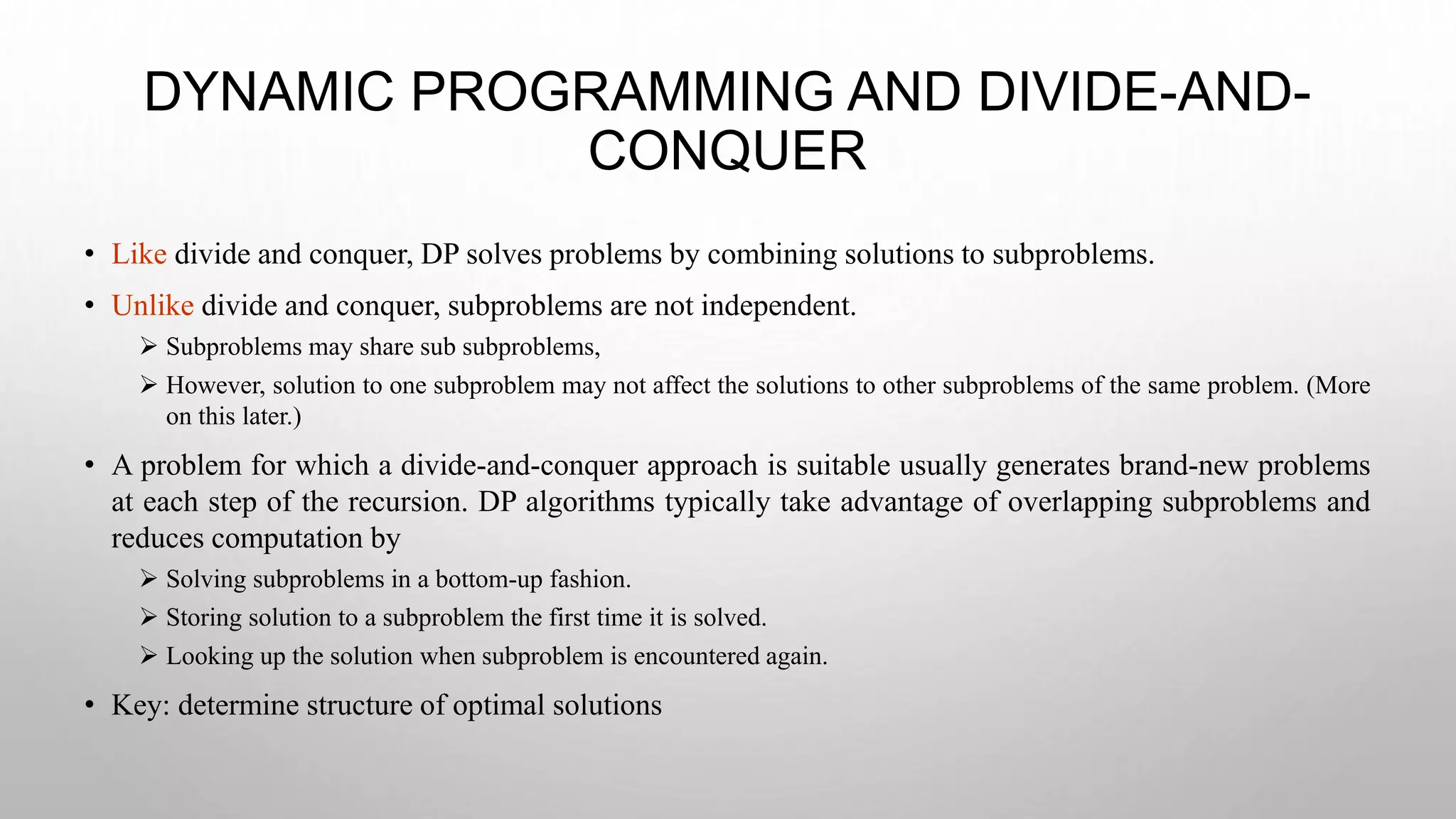
DYNAMIC PROGRAMMING ANDDIVIDE-AND-
CONQUER
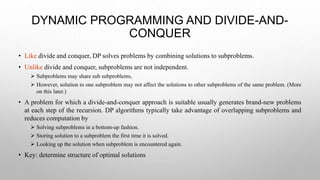
• Like divide and conquer, DP solves problems by combining solutions to subproblems.
• Unlike divide and conquer, subproblems are not independent.
Subproblems may share sub subproblems,
However, solution to one subproblem may not affect the solutions to other subproblems of the same problem. (More
on this later.)
• A problem for which a divide-and-conquer approach is suitable usually generates brand-new problems
at each step of the recursion. DP algorithms typically take advantage of overlapping subproblems and
reduces computation by
Solving subproblems in a bottom-up fashion.
Storing solution to a subproblem the first time it is solved.
Looking up the solution when subproblem is encountered again.
• Key: determine structure of optimal solutions
7.
PROBLEMS REPRESENTING DYNAMIC
PROGRAMMING
•The best way to get a feel for this is through some more examples.
Matrix chaining optimization
Longest common subsequence
0-1 knapsack problem
Transitive closure of a direct graph
All point shortest path
Binomial co-efficient
8.
PRINCIPLE OF OPTIMALITY
•Obtains the solution using principle of optimality.
• In an optimal sequence of decisions or choices, each subsequence must also be optimal.
• When it is not possible to apply the principle of optimality it is almost impossible to obtain the
solution using the dynamic programming approach.
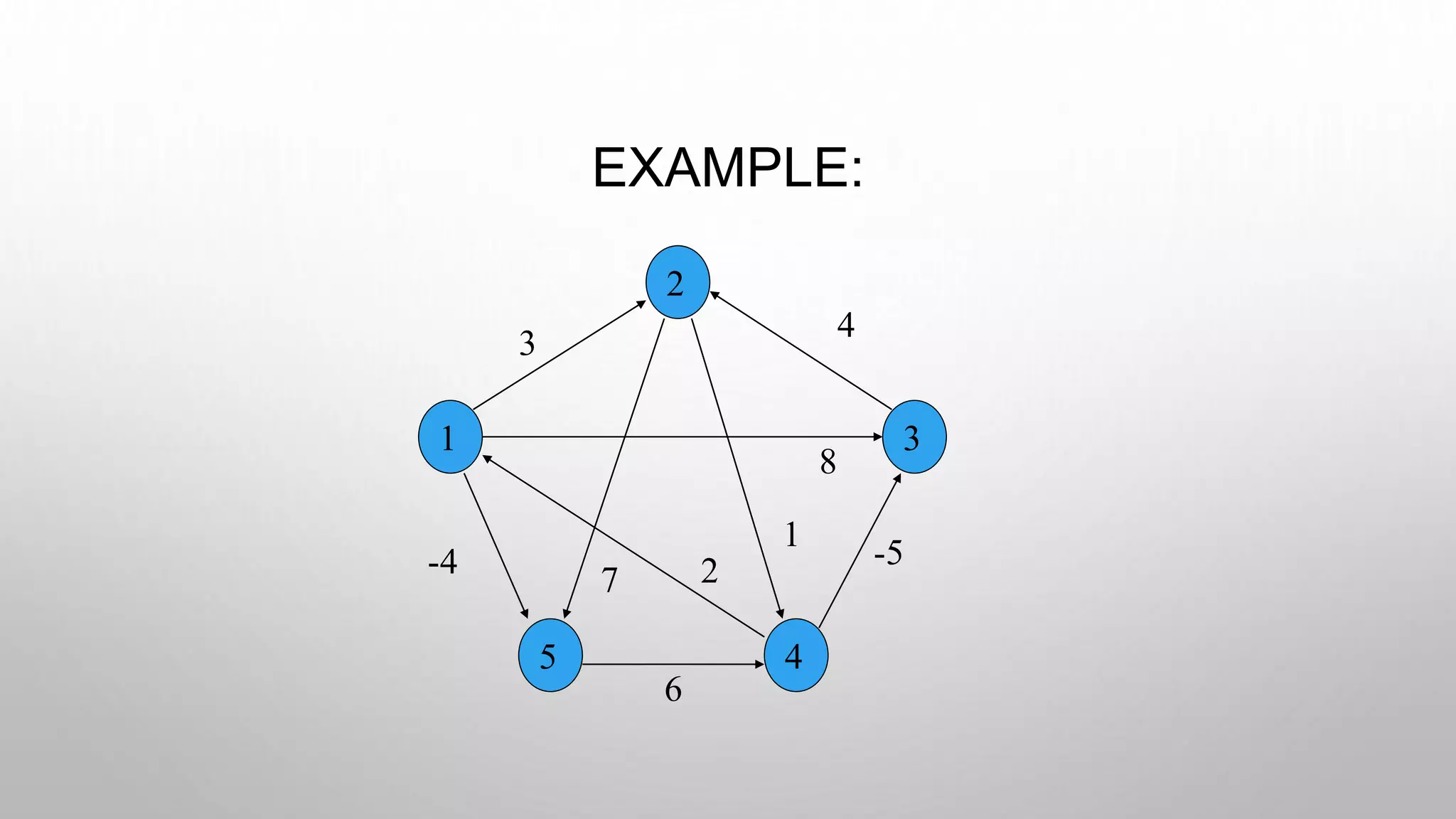
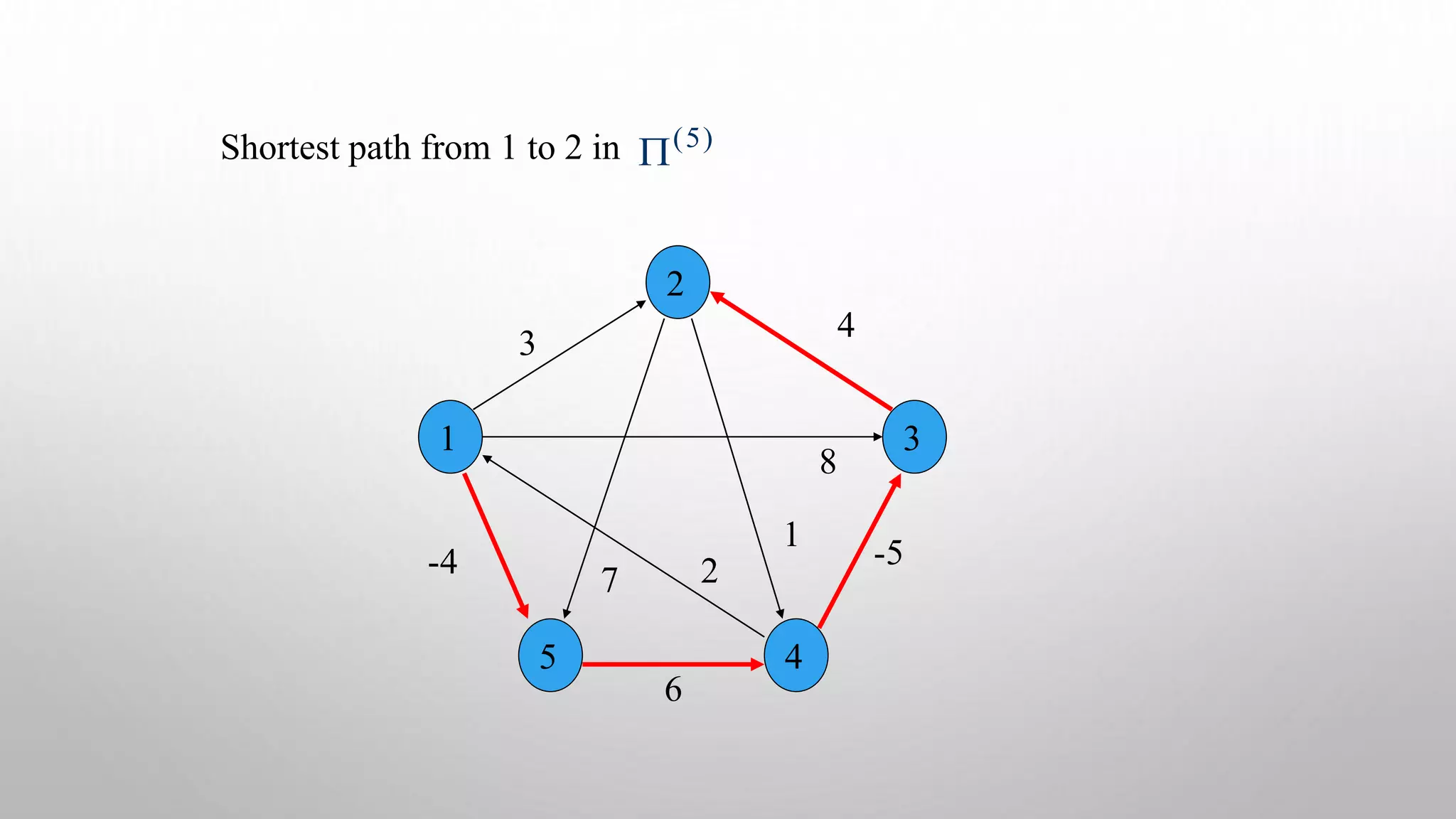
• Example: finding of shortest path in a given graph uses the principle of optimality.
9.
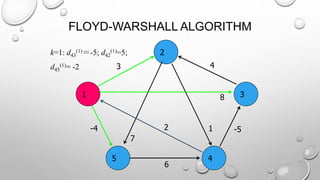
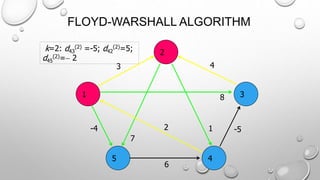
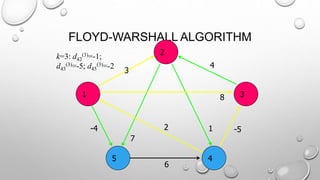
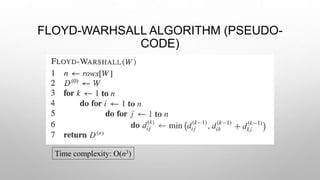
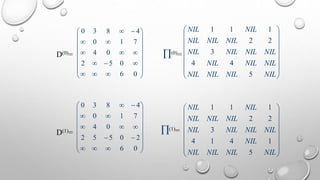
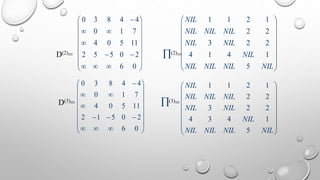
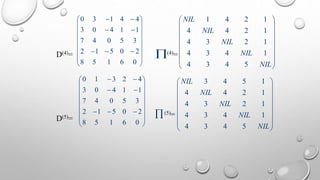
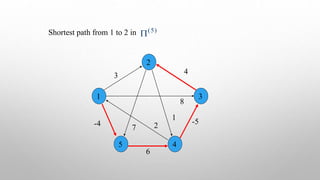
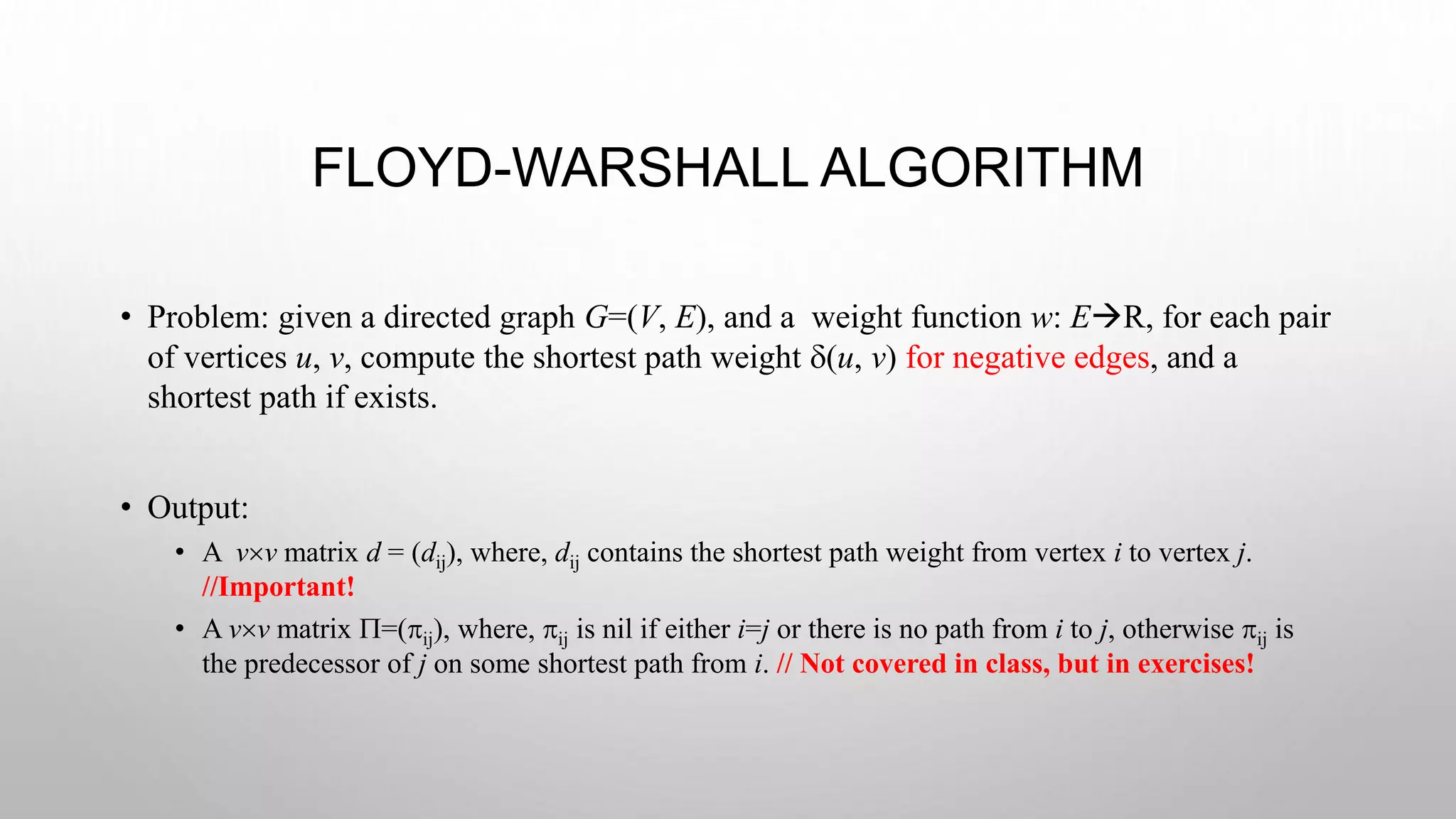
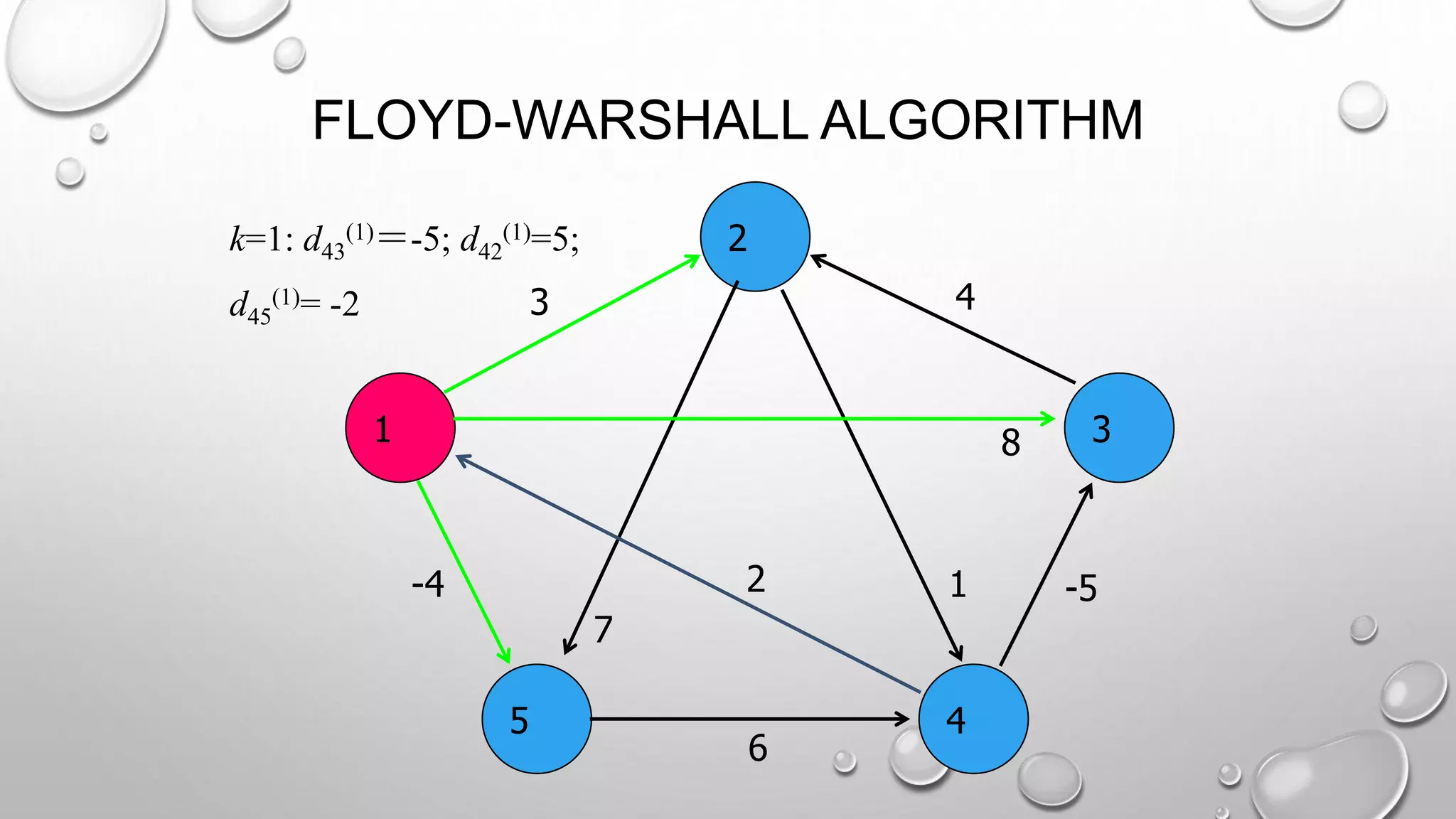
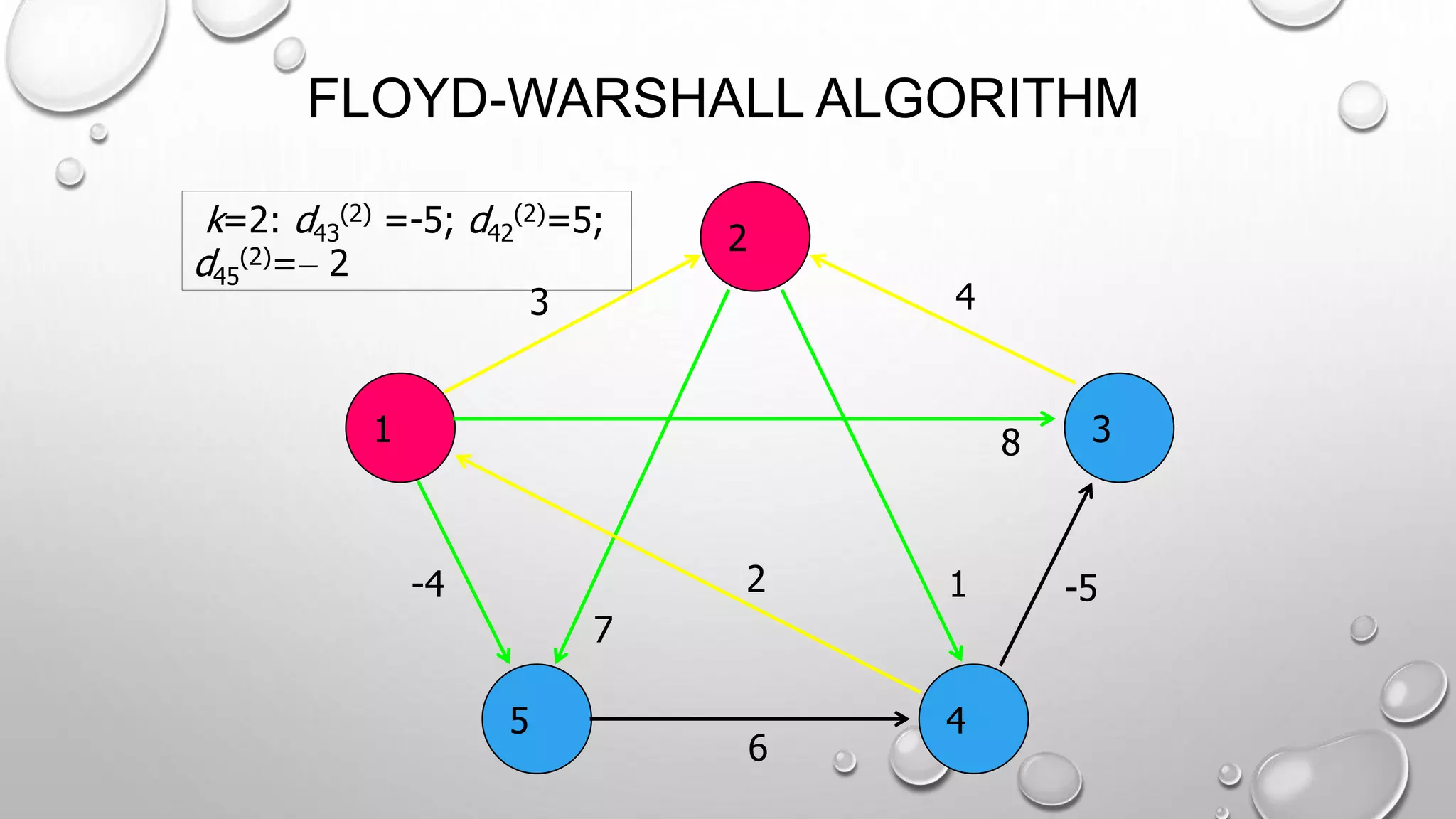
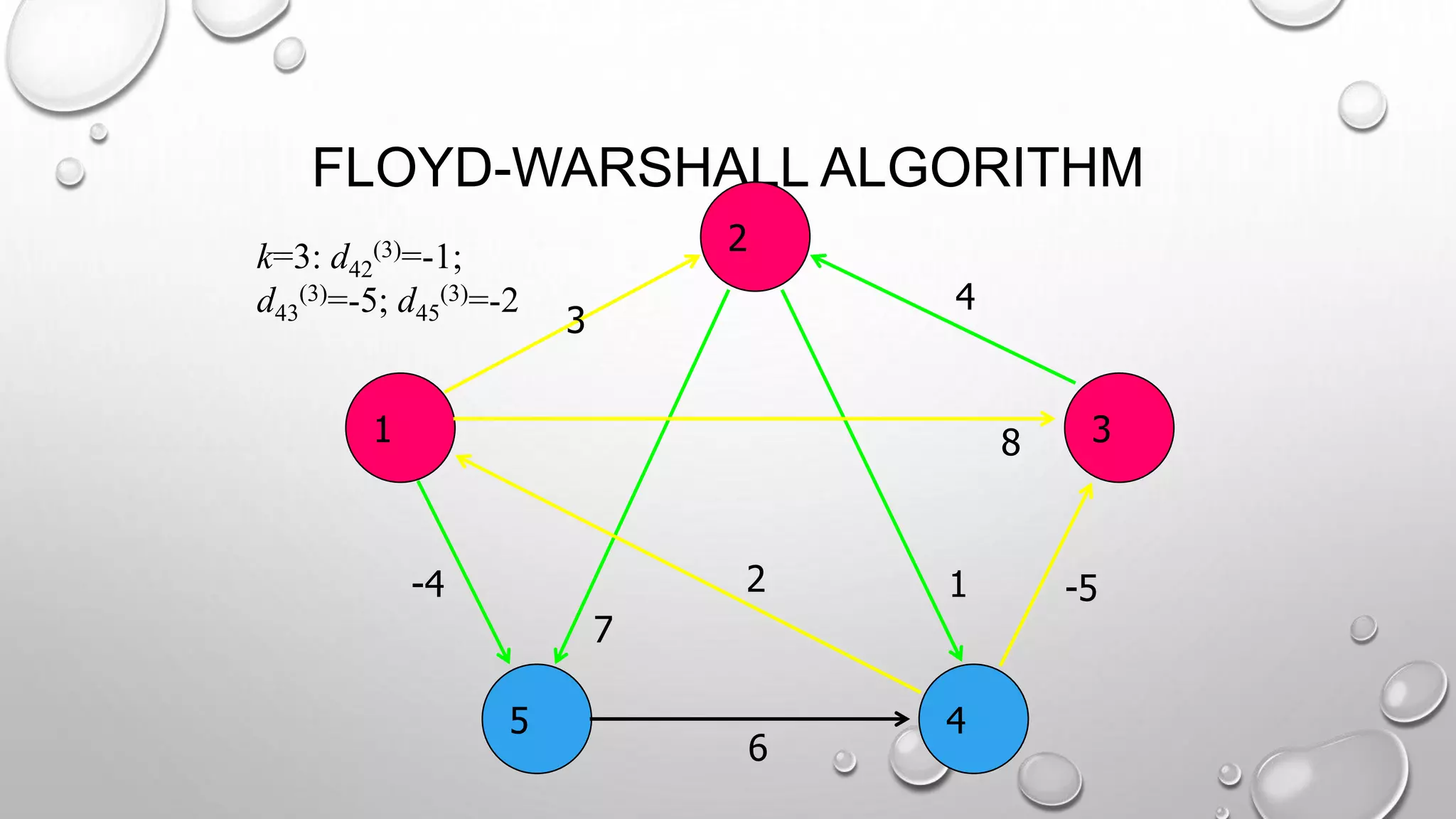
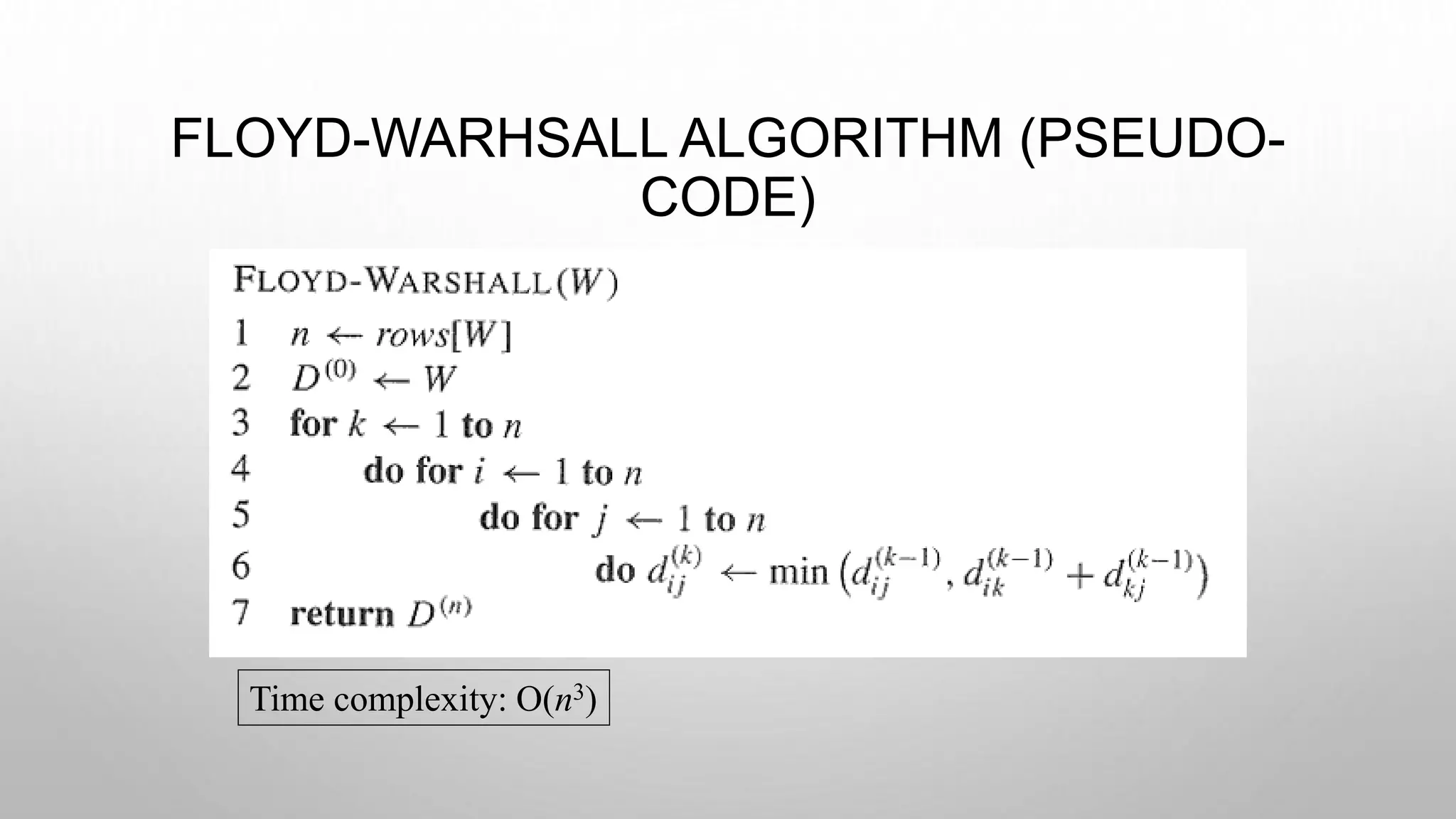
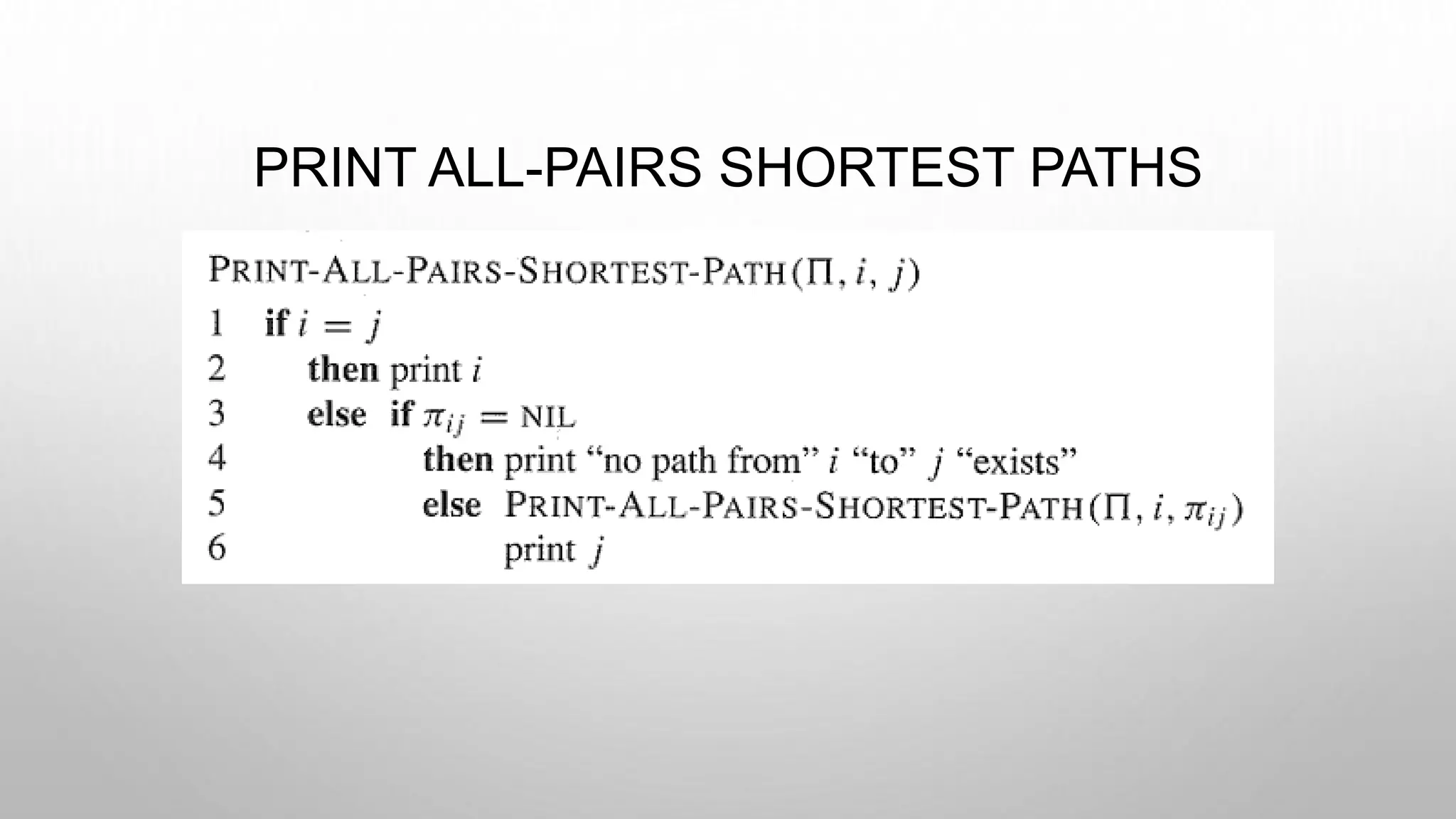
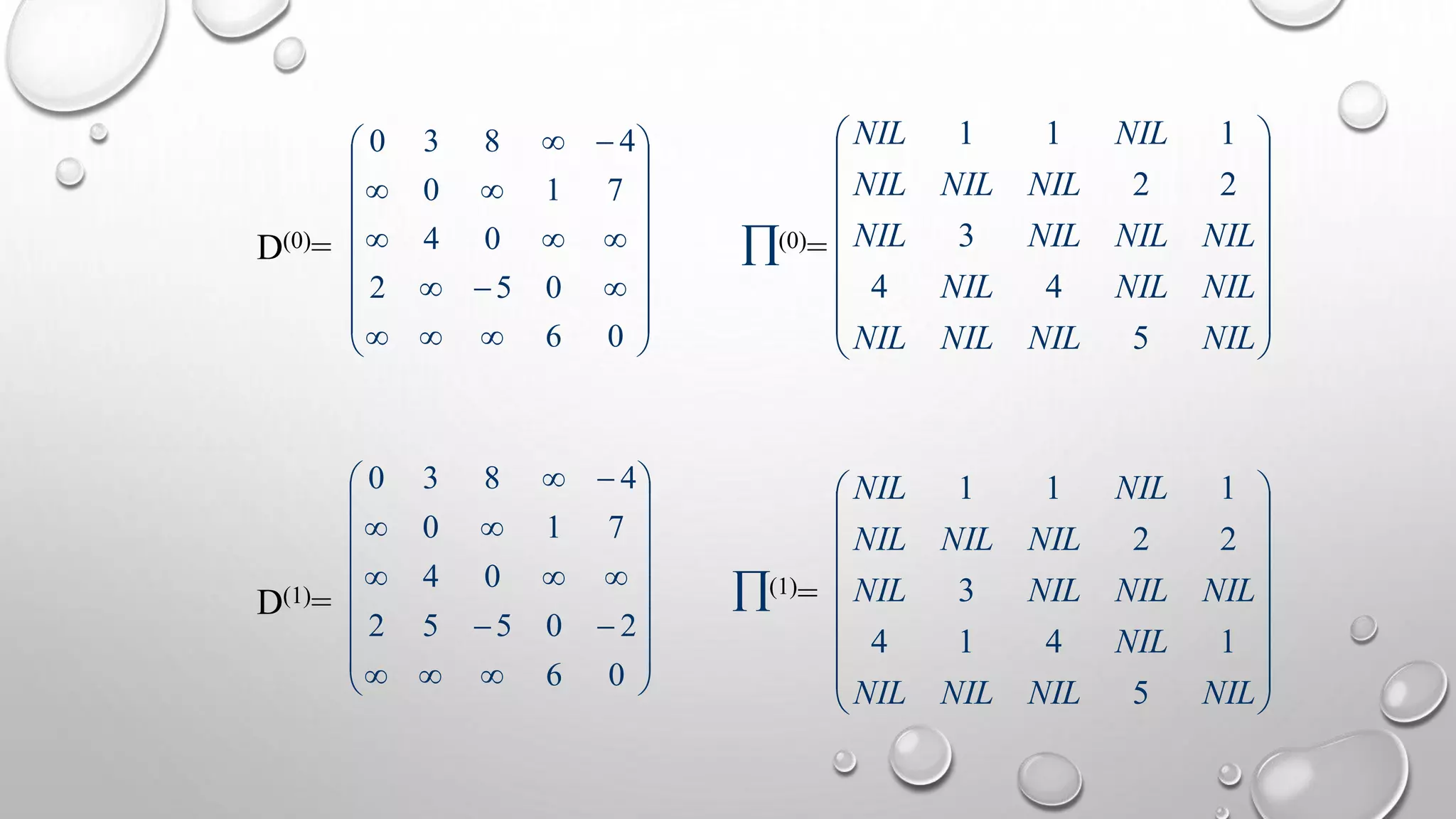
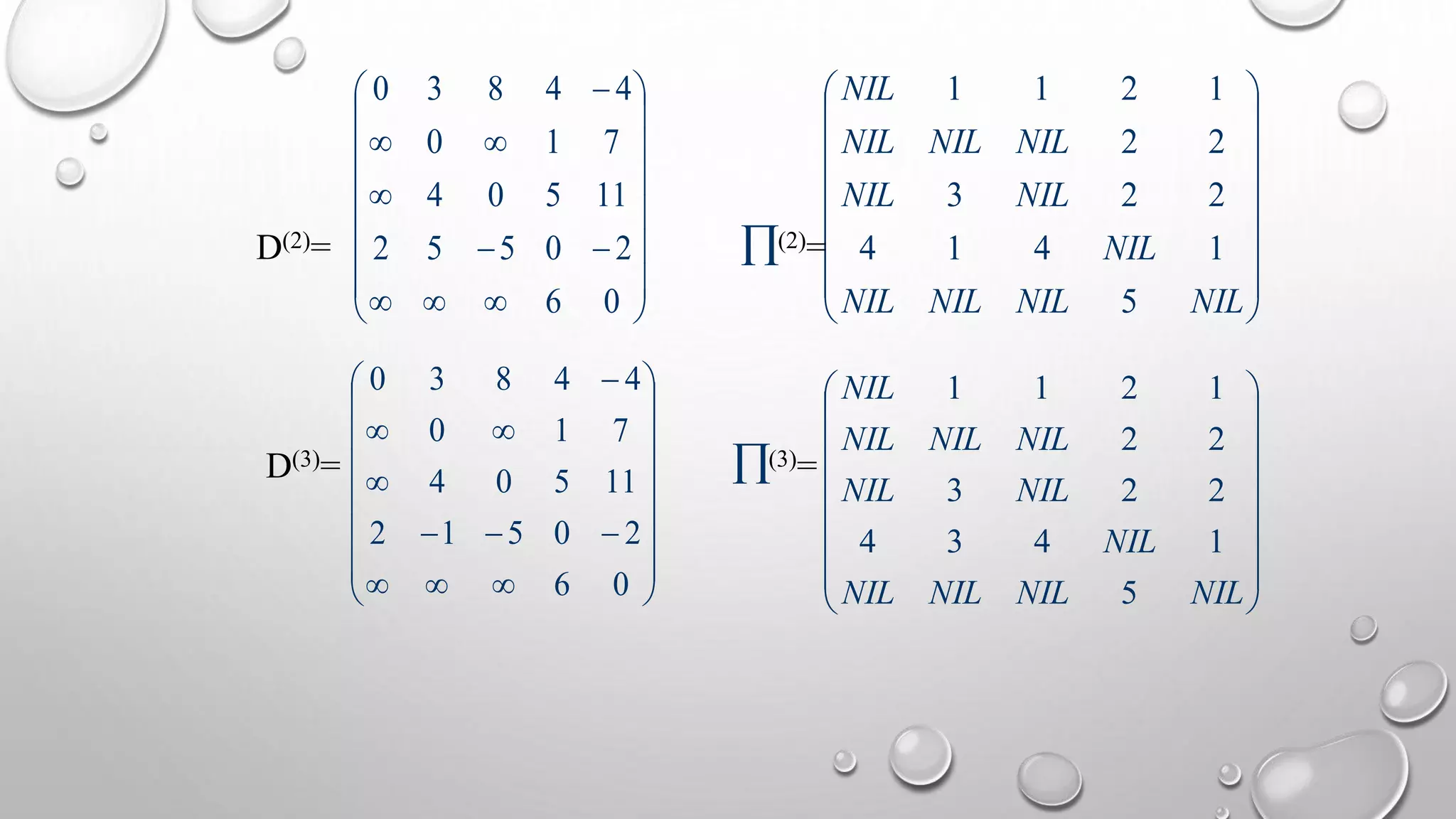
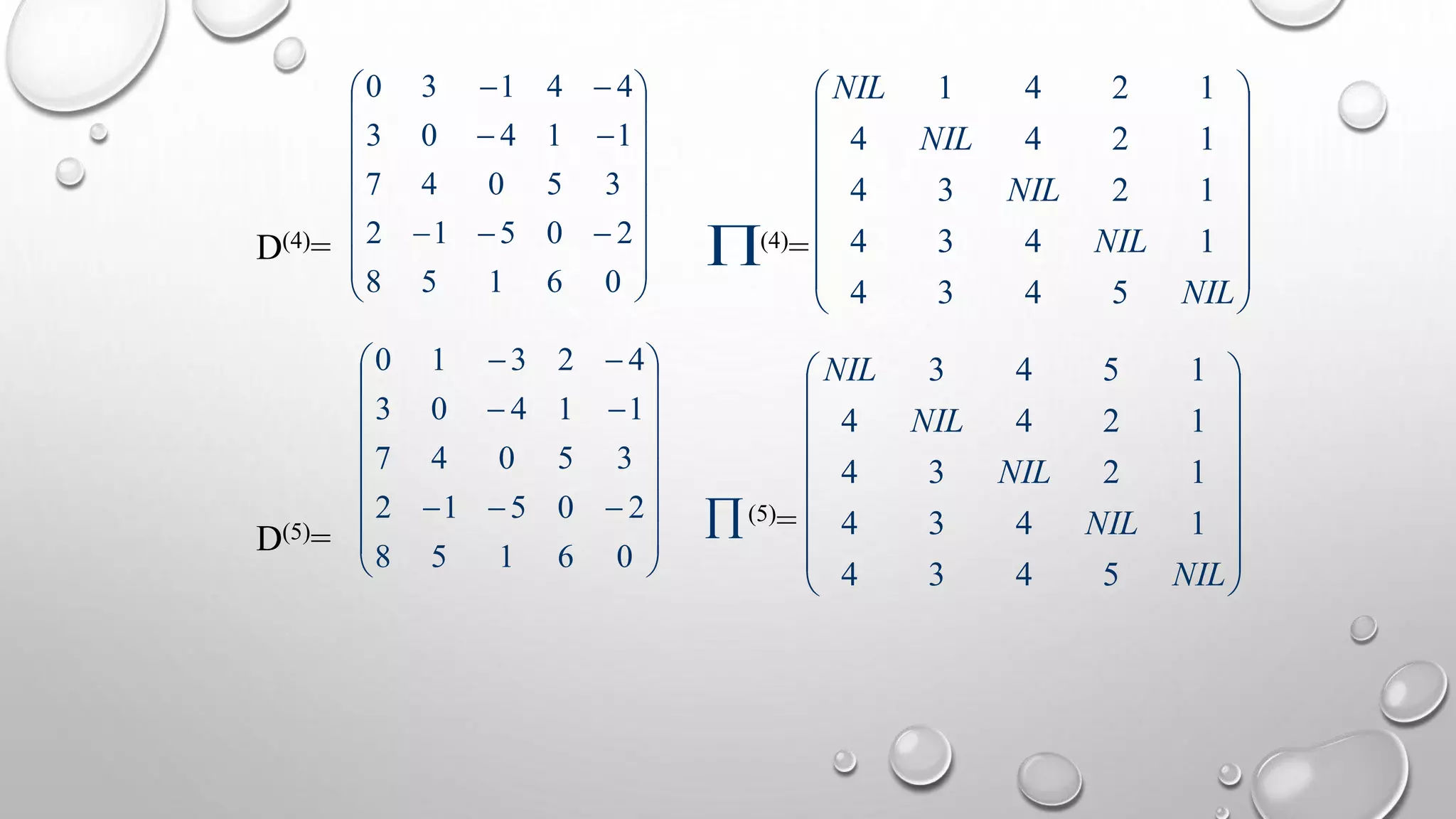
FLOYD-WARSHALL ALGORITHM
• Problem:given a directed graph G=(V, E), and a weight function w: ER, for each pair
of vertices u, v, compute the shortest path weight (u, v) for negative edges, and a
shortest path if exists.
• Output:
• A vv matrix d = (dij), where, dij contains the shortest path weight from vertex i to vertex j.
//Important!
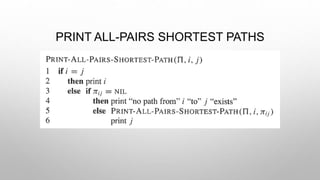
• A vv matrix =(ij), where, ij is nil if either i=j or there is no path from i to j, otherwise ij is
the predecessor of j on some shortest path from i. // Not covered in class, but in exercises!
10.
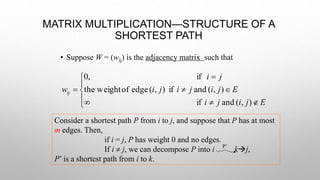
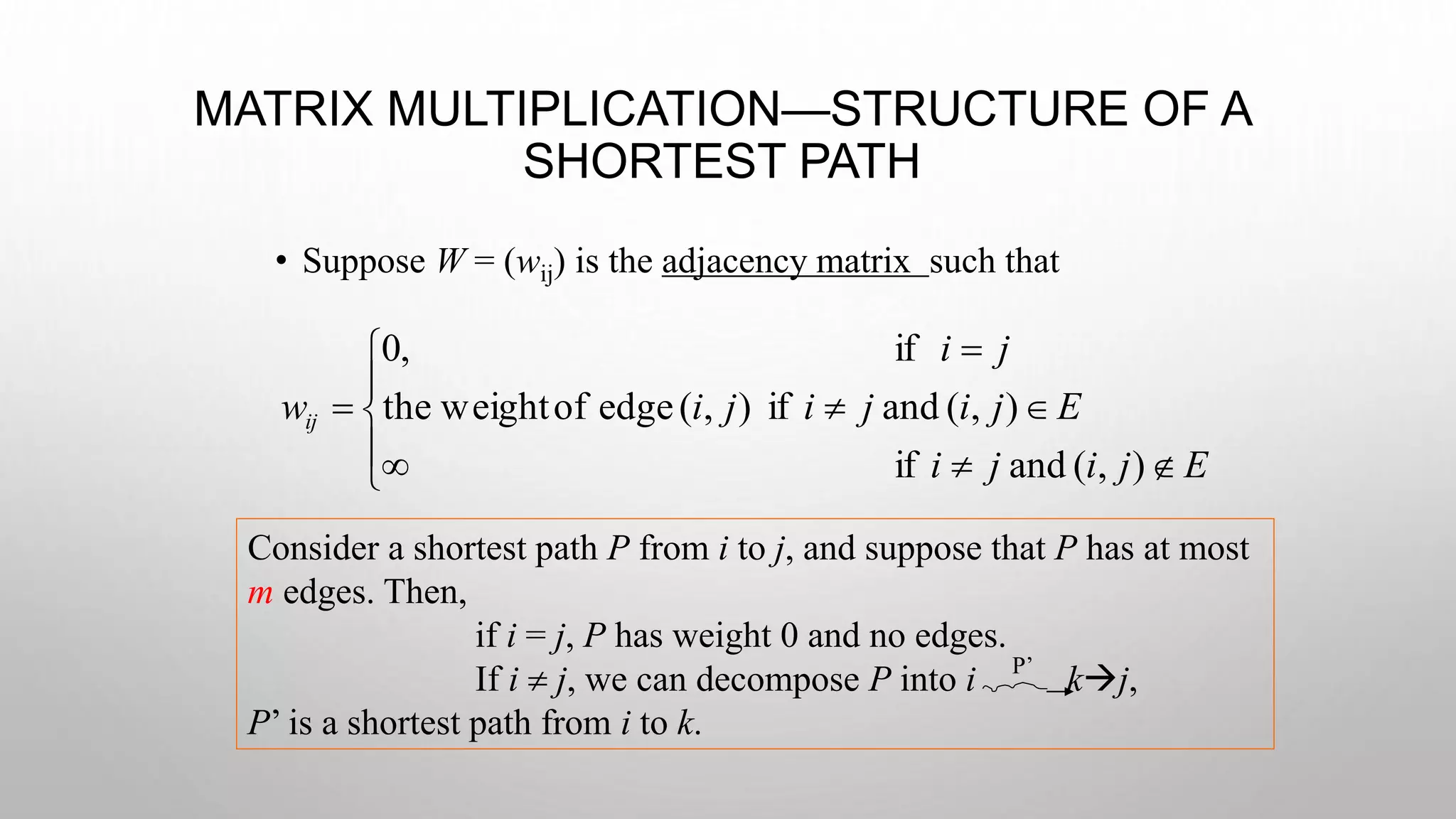
MATRIX MULTIPLICATION—STRUCTURE OFA
SHORTEST PATH
• Suppose W = (wij) is the adjacency matrix such that
),(andif
),(andif),(edgeofweightthe
if,0
Ejiji
Ejijiji
ji
wij
Consider a shortest path P from i to j, and suppose that P has at most
m edges. Then,
if i = j, P has weight 0 and no edges.
If i j, we can decompose P into i kj,
P’ is a shortest path from i to k.
P’
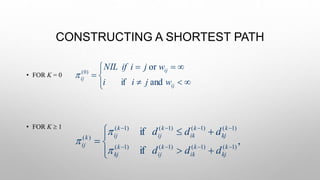
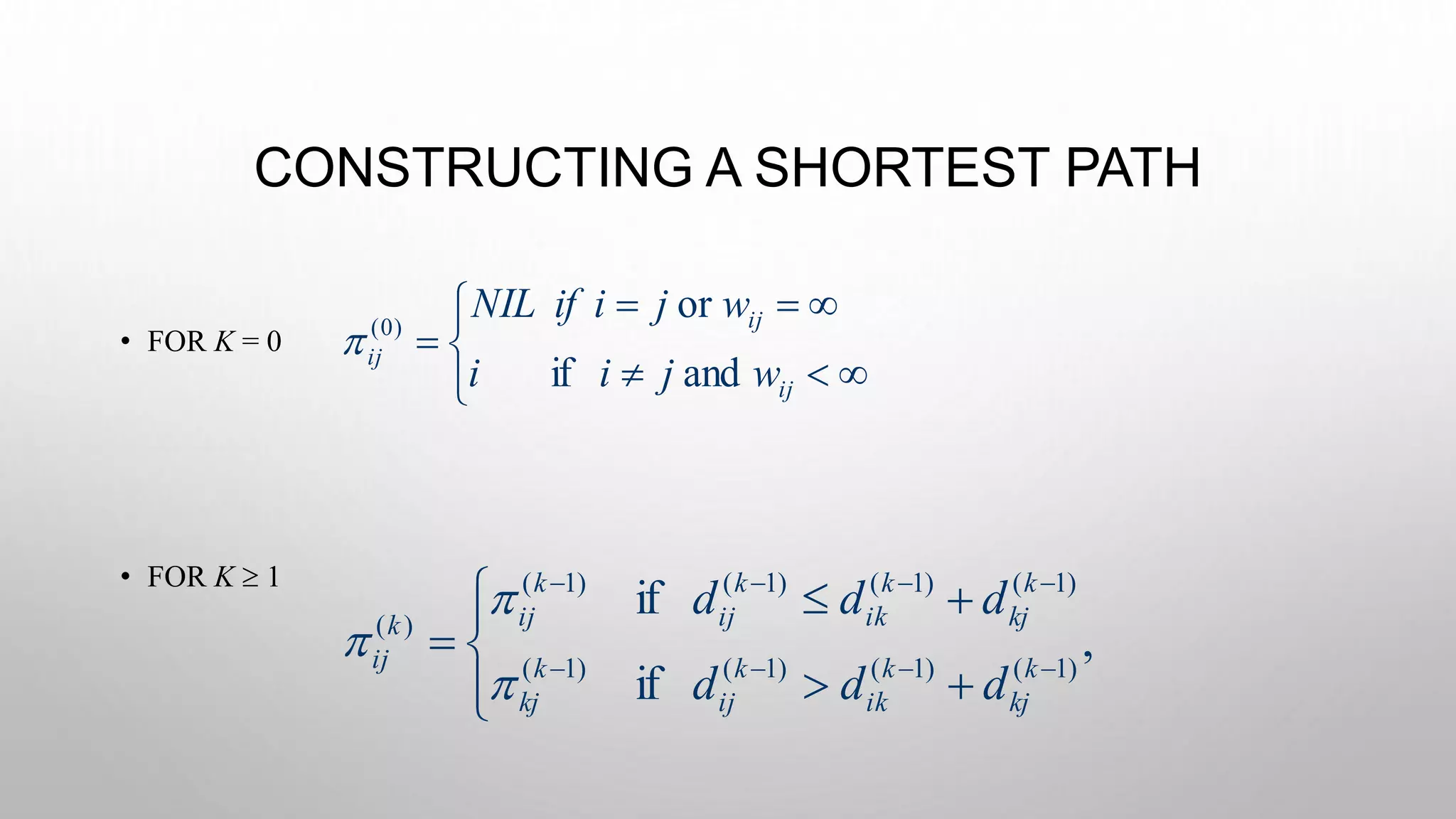
CONSTRUCTING A SHORTESTPATH
• FOR K = 0
• FOR K 1
ij
ij
ij
wjii
wjiifNIL
andif
or)0(
,
if
if
)1()1()1()1(
)1()1()1()1(
)(
k
kj
k
ik
k
ij
k
kj
k
kj
k
ik
k
ij
k
ijk
ij
ddd
ddd