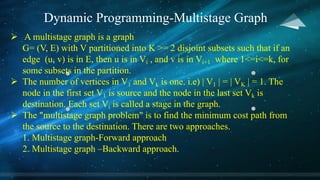
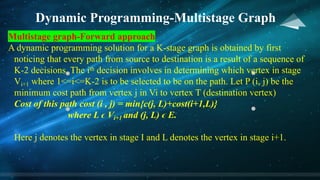
This document provides an overview of dynamic programming. It begins by defining dynamic programming as an algorithm design method for problems that can be solved through a sequence of decisions. It then outlines the four steps for developing a dynamic programming algorithm and discusses the principle of optimality. The document compares dynamic programming to greedy methods and divide-and-conquer approaches. It also explains how dynamic programming can be applied to multistage graph problems using both forward and backward approaches. Finally, it provides an overview of the Floyd-Warshall algorithm for solving all-pairs shortest path problems.


![All Pairs shortest Path – FLOYD Warshall Algorithm
Ø Used for solving the All Pairs Shortest Path problem.
Ø The problem is to find shortest distances between every pair of vertices in a given
edge.
Ø The solution matrix is initialized using the given graph . Then the solution matrix
is updated by considering all the vertices as an intermediate vertex.
Ø We have to pick one by one all the vertices and updates all shortest paths which
include the picked vertex as an intermediate vertex in the shortest path. When we
pick vertex number k as an intermediate vertex, we already have considered
vertices {0, 1, 2, .. k-1} as intermediate vertices. For every pair (i, j) of the source
and destination vertices, there are two possible cases1) k is not an intermediate
vertex in shortest path from i to j. We keep the value of dist[i][j] as it is2) k is an
intermediate vertex in shortest path from i to j. We update the value of dist[i][j] as
dist[i][k] + dist[k][j] if dist[i][j] > dist[i][k] + dist[k][j]](https://image.slidesharecdn.com/unit4-dynamicprogramming-230522172424-d77ad090/85/Unit-4-Dynamic-Programming-pdf-9-320.jpg)
![All Pairs shortest Path – FLOYD Warshall Algorithm
Formula:
Dk [i, j] =min {Dk-1[i, j], Dk-1[i, k] +Dk-1[k, j]}
Where Dk represents the matrix D after kth iteration. Initially D0=C (cost matrix). i
is the source vertex , j is the destination vertex and k represents the intermediate
vertex used.](https://image.slidesharecdn.com/unit4-dynamicprogramming-230522172424-d77ad090/85/Unit-4-Dynamic-Programming-pdf-10-320.jpg)

![All Pairs shortest Path – FLOYD Warshall Algorithm
Ø Used for solving the All Pairs Shortest Path problem.
Ø The problem is to find shortest distances between every pair of vertices in a given
edge.
Ø The solution matrix is initialized using the given graph . Then the solution matrix
is updated by considering all the vertices as an intermediate vertex.
Ø We have to pick one by one all the vertices and updates all shortest paths which
include the picked vertex as an intermediate vertex in the shortest path. When we
pick vertex number k as an intermediate vertex, we already have considered
vertices {0, 1, 2, .. k-1} as intermediate vertices. For every pair (i, j) of the source
and destination vertices, there are two possible cases1) k is not an intermediate
vertex in shortest path from i to j. We keep the value of dist[i][j] as it is2) k is an
intermediate vertex in shortest path from i to j. We update the value of dist[i][j] as
dist[i][k] + dist[k][j] if dist[i][j] > dist[i][k] + dist[k][j]](https://image.slidesharecdn.com/unit4-dynamicprogramming-230522172424-d77ad090/75/Unit-4-Dynamic-Programming-pdf-9-2048.jpg)
![All Pairs shortest Path – FLOYD Warshall Algorithm
Formula:
Dk [i, j] =min {Dk-1[i, j], Dk-1[i, k] +Dk-1[k, j]}
Where Dk represents the matrix D after kth iteration. Initially D0=C (cost matrix). i
is the source vertex , j is the destination vertex and k represents the intermediate
vertex used.](https://image.slidesharecdn.com/unit4-dynamicprogramming-230522172424-d77ad090/75/Unit-4-Dynamic-Programming-pdf-10-2048.jpg)






















































































