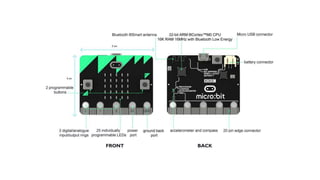
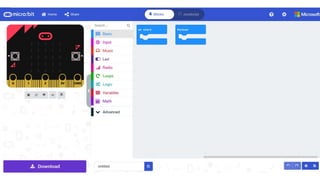
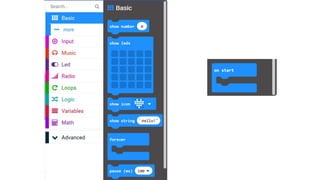
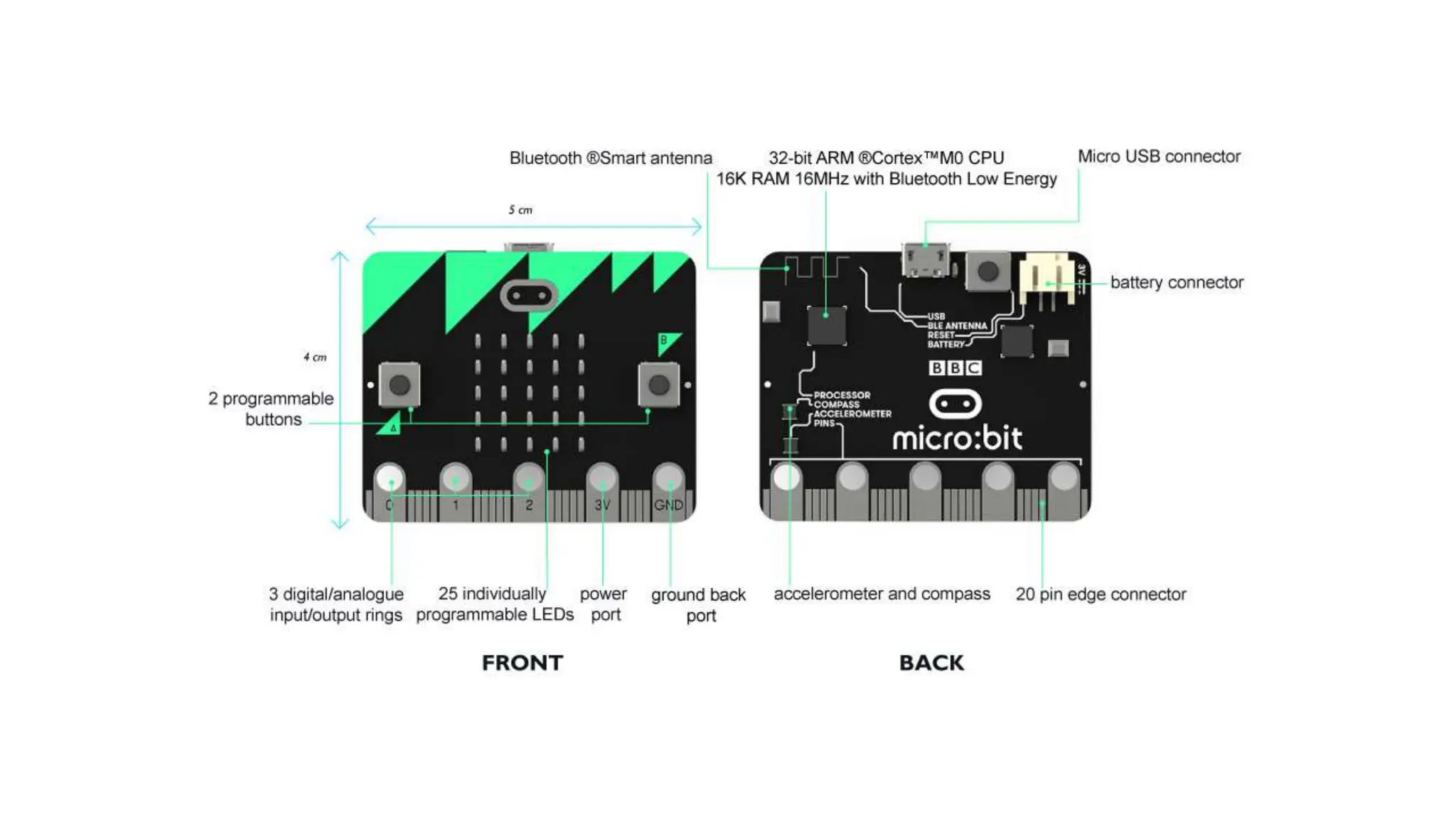
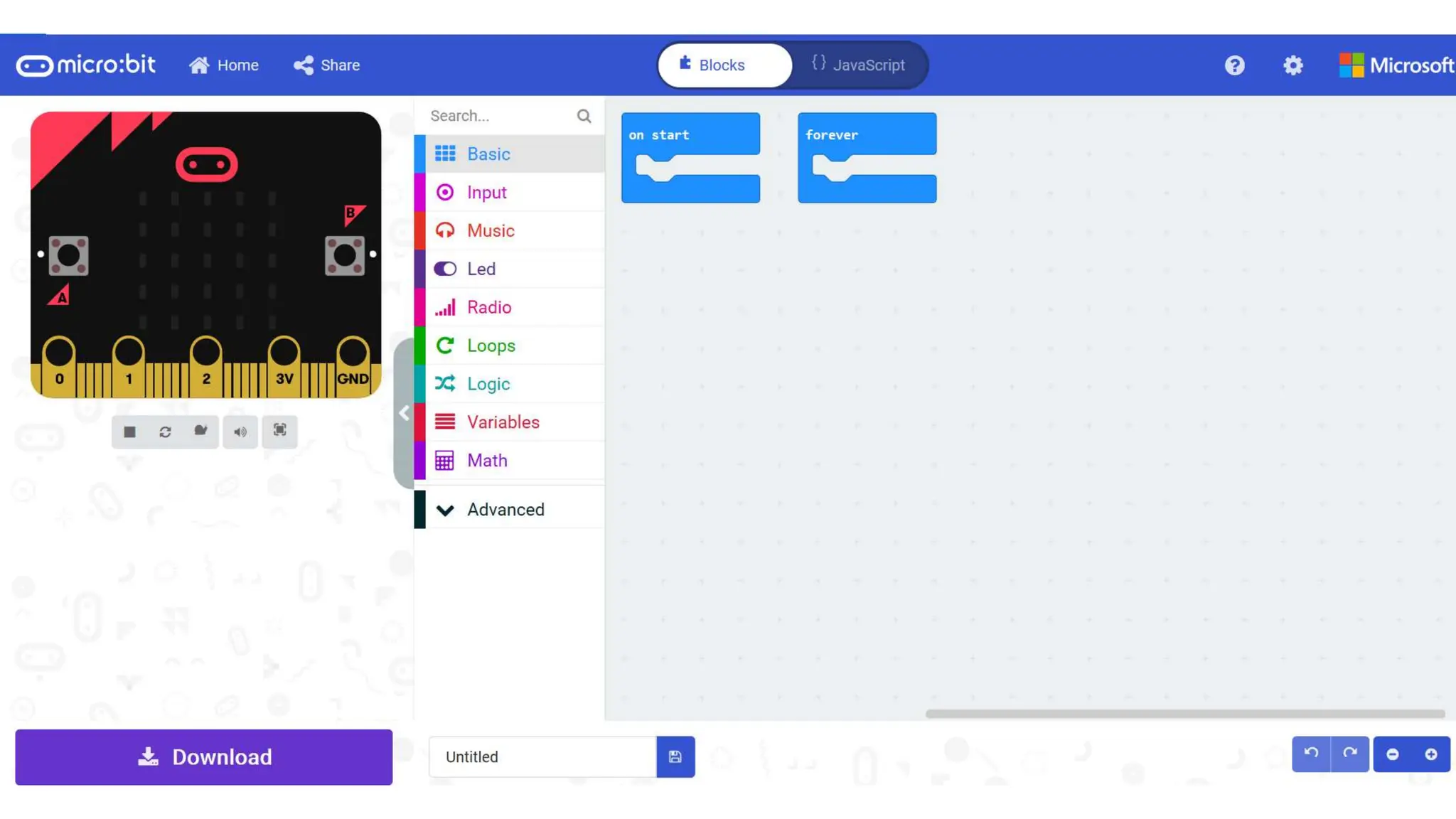
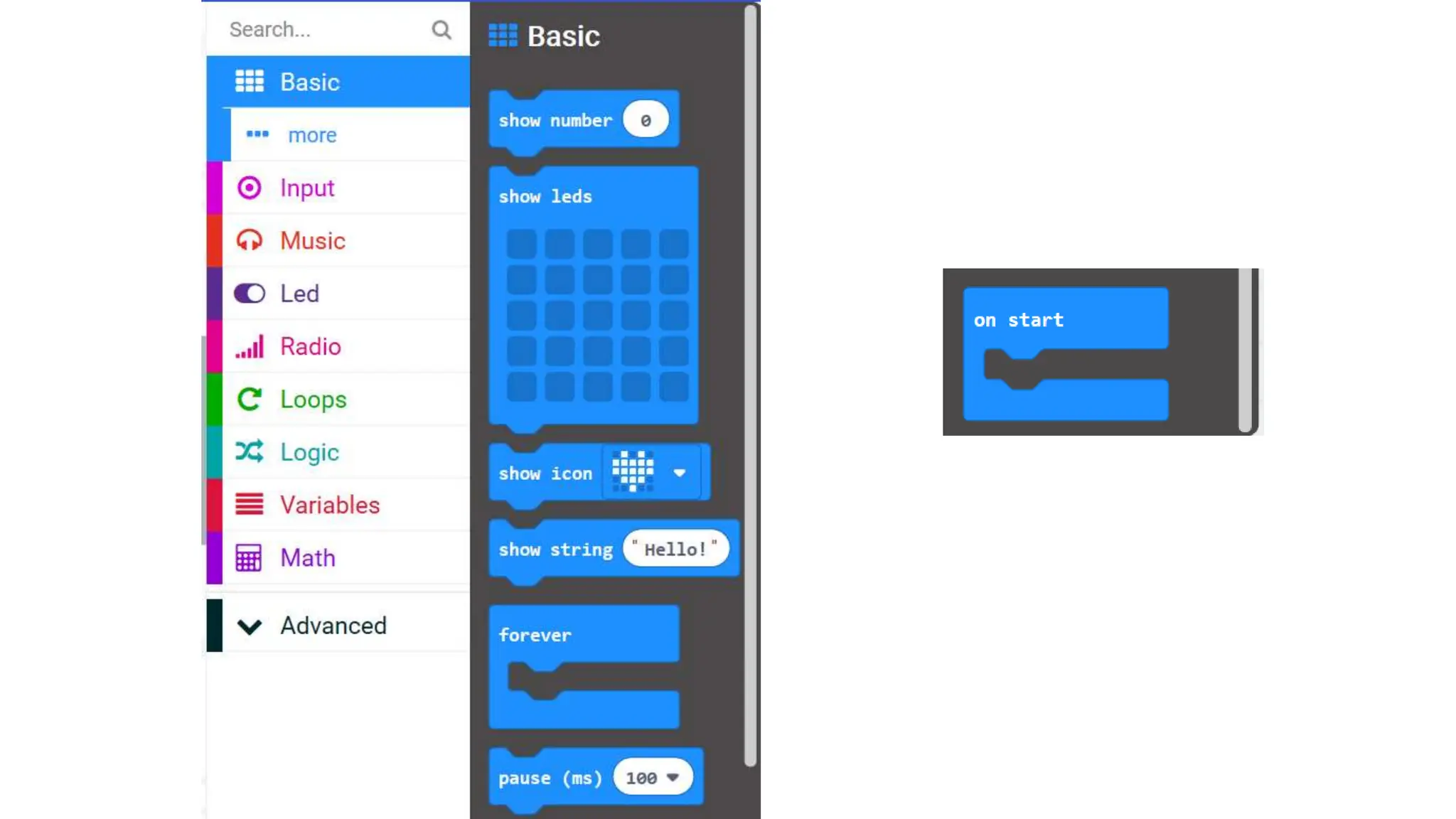
The micro:bit is an ARM-based development board with various peripherals that allow users to program and interact with it without needing external hardware. It has an LED matrix, buttons, sensors, and Bluetooth connectivity. Programming environments like MakeCode make it easy for beginners to code the micro:bit using block-based or text-based languages. Example programs control the LED display, read sensor values, and communicate with other devices via Bluetooth.