Downloaded 14 times
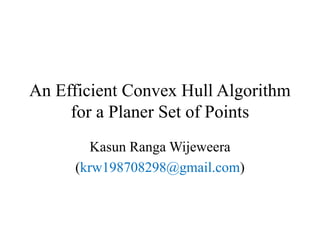
![A 2D Convex Hull Algorithm
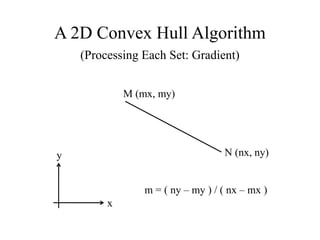
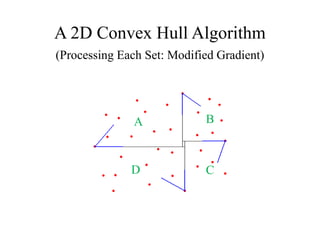
(Processing Each Set: Modified Gradient)
Region Diagram Modified Gradient Begin Point End Point
A ( ay[i] – hully ) / ( ax[i] – hullx ) x = minx
y = y_minx
x = x_maxy
y = maxy
B ( bx[i] – hullx ) / (hully - by[i] ) x = x_maxy
y = maxy
x = maxx
y = y_maxx
C ( hully - cy[i] ) / ( hullx - cx[i] ) x = maxx
y = y_maxx
x = x_miny
y = miny
D ( hullx – dx[i] ) / ( dy[i] – hully ) x = x_miny
y = miny
x = minx
y =y_minx](https://image.slidesharecdn.com/krwchpart1-140603080900-phpapp01/85/An-Efficient-Convex-Hull-Algorithm-for-a-Planer-Set-of-Points-16-320.jpg)


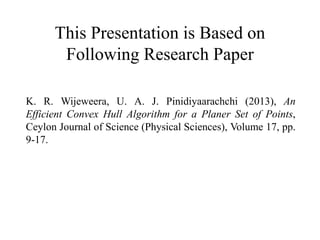
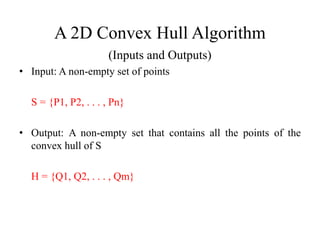
![A 2D Convex Hull Algorithm
(Processing Each Set: Modified Gradient)
Region Diagram Modified Gradient Begin Point End Point
A ( ay[i] – hully ) / ( ax[i] – hullx ) x = minx
y = y_minx
x = x_maxy
y = maxy
B ( bx[i] – hullx ) / (hully - by[i] ) x = x_maxy
y = maxy
x = maxx
y = y_maxx
C ( hully - cy[i] ) / ( hullx - cx[i] ) x = maxx
y = y_maxx
x = x_miny
y = miny
D ( hullx – dx[i] ) / ( dy[i] – hully ) x = x_miny
y = miny
x = minx
y =y_minx](https://image.slidesharecdn.com/krwchpart1-140603080900-phpapp01/75/An-Efficient-Convex-Hull-Algorithm-for-a-Planer-Set-of-Points-16-2048.jpg)
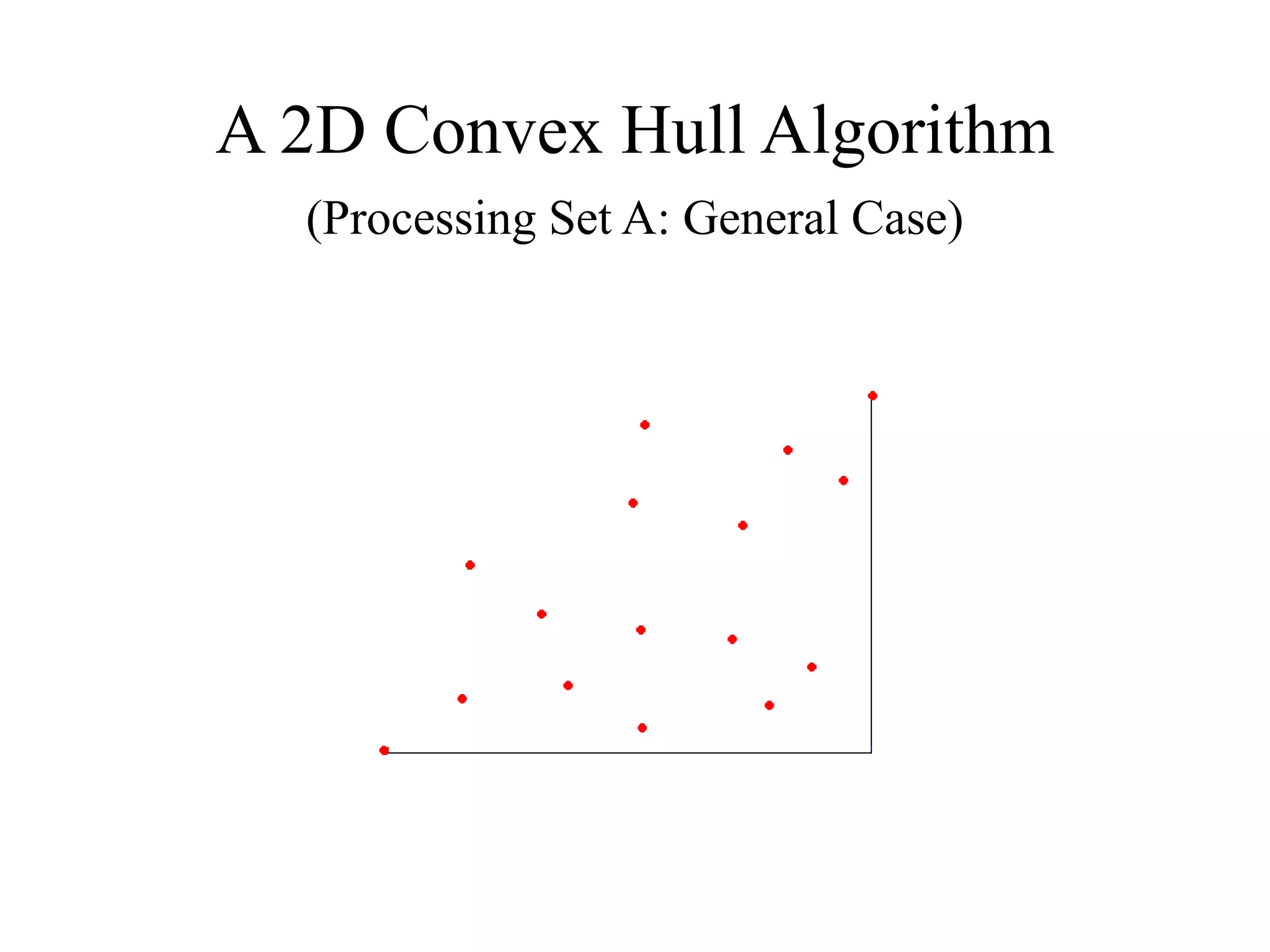
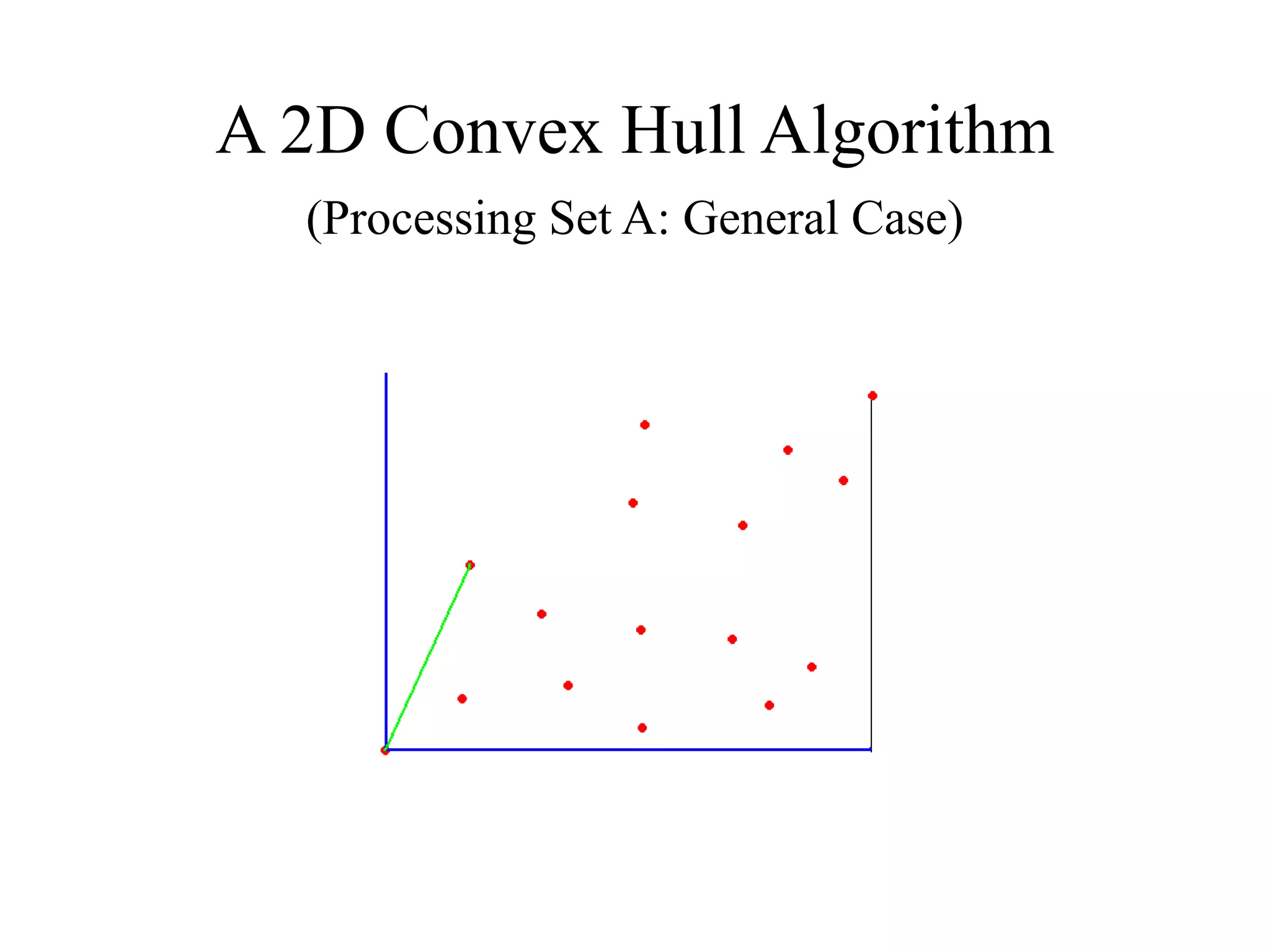
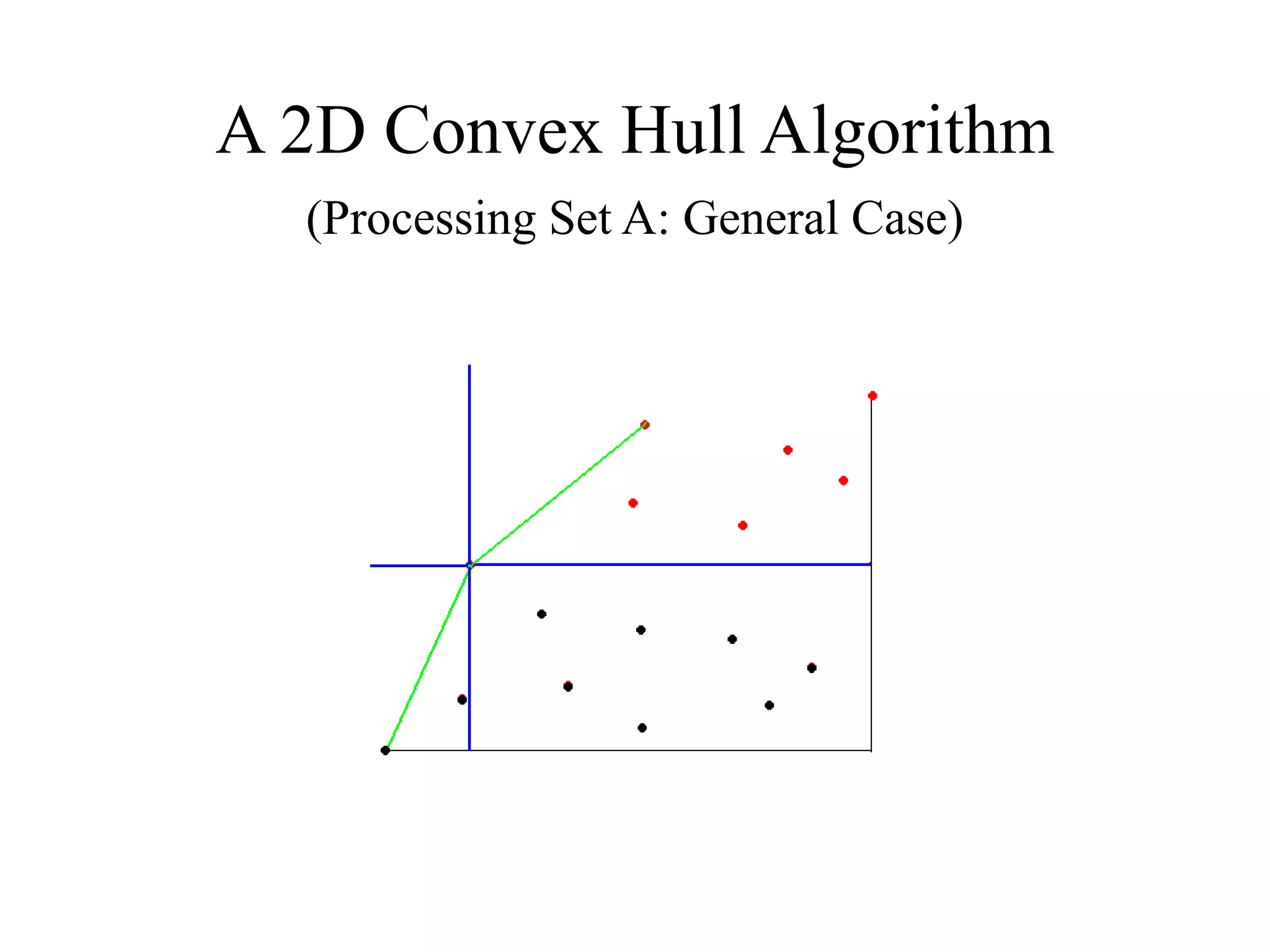
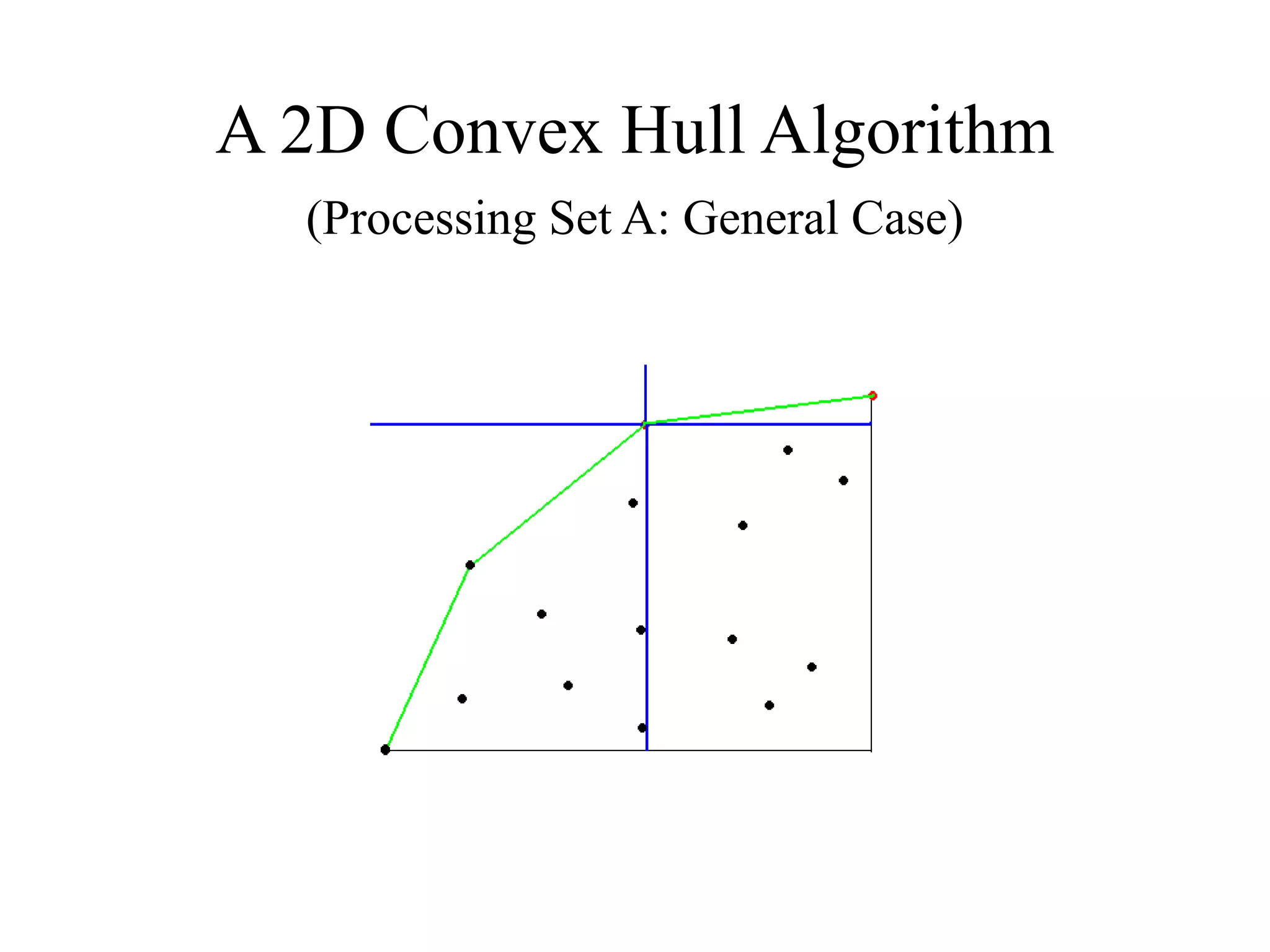
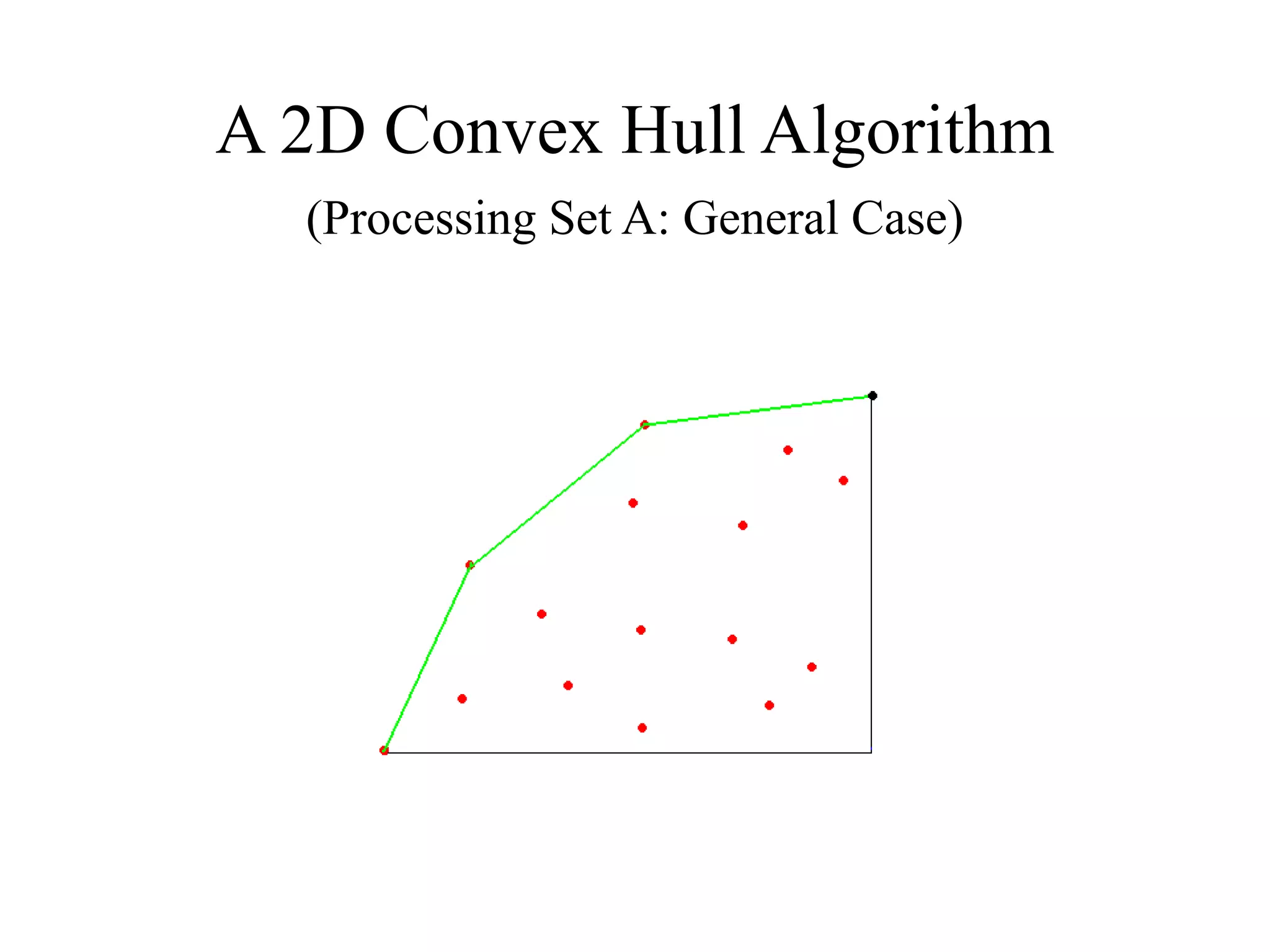
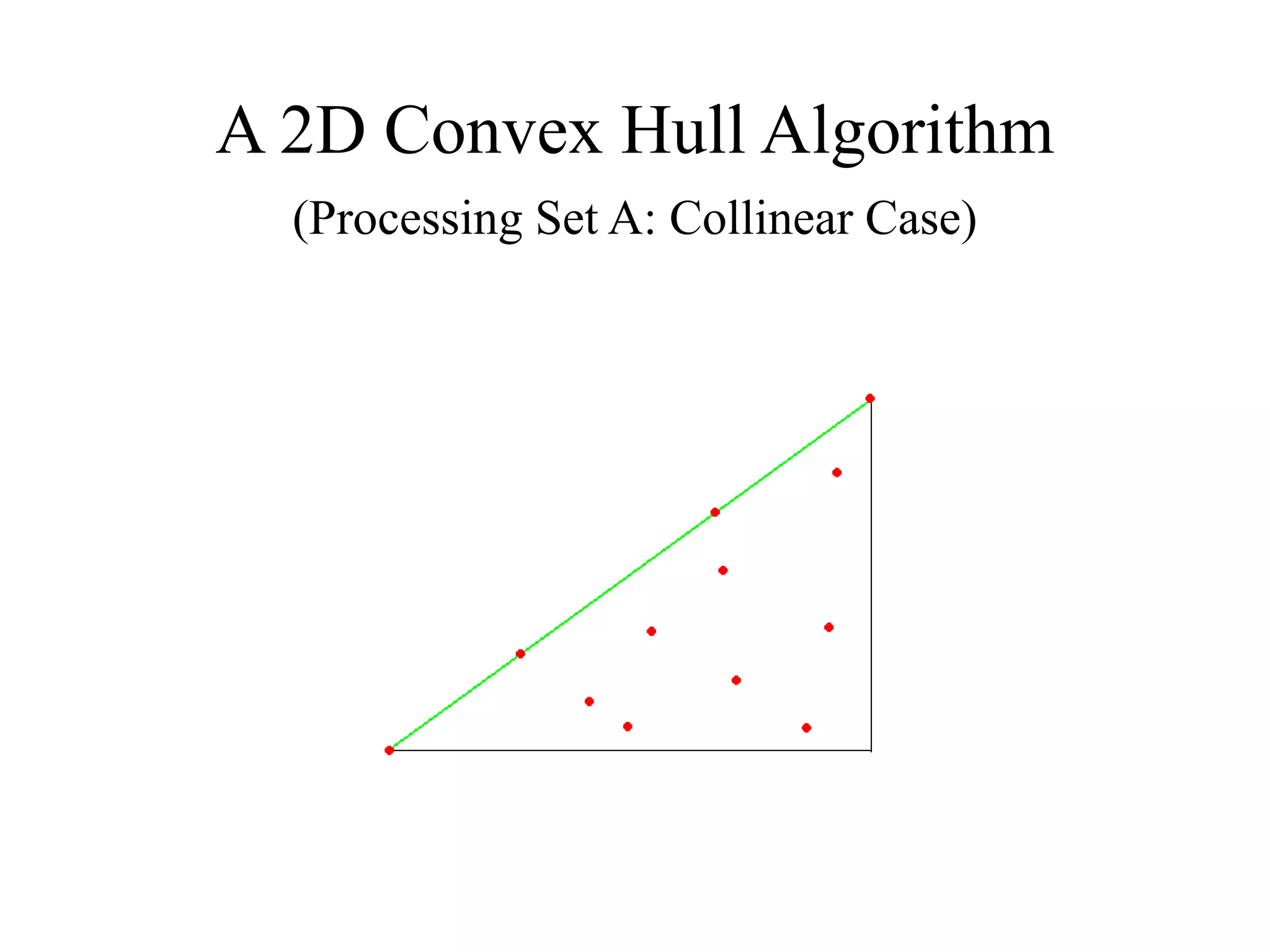
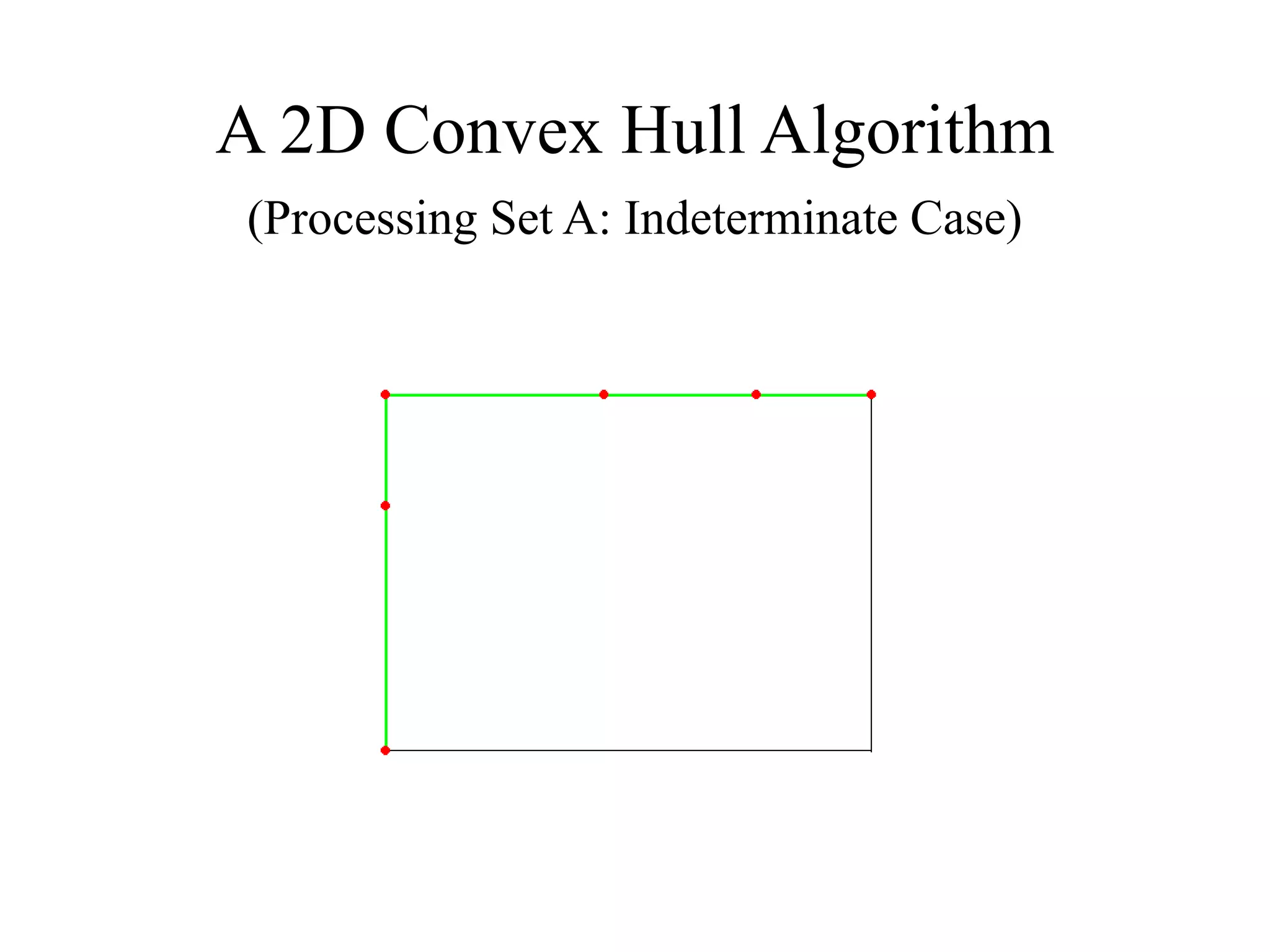
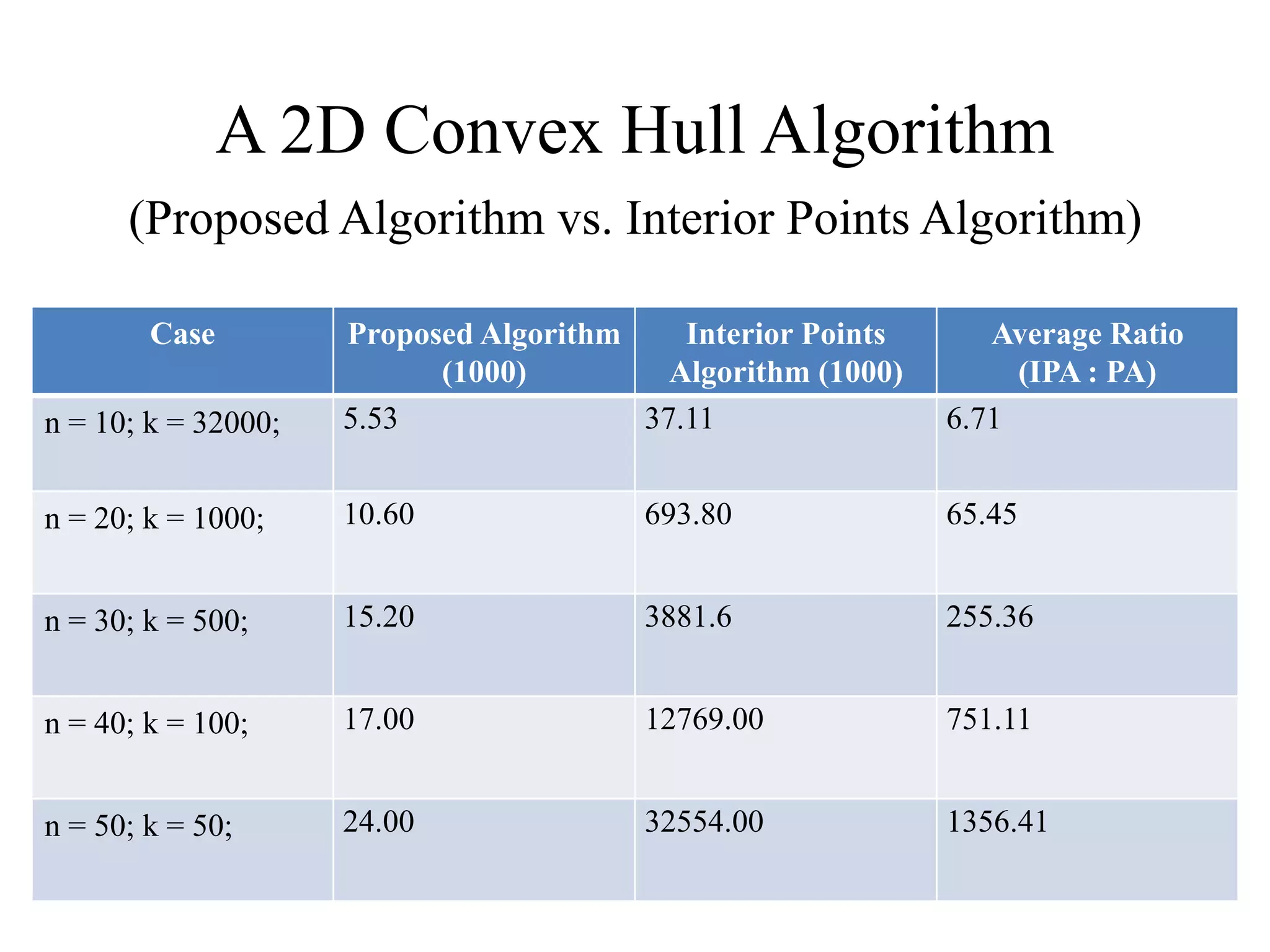
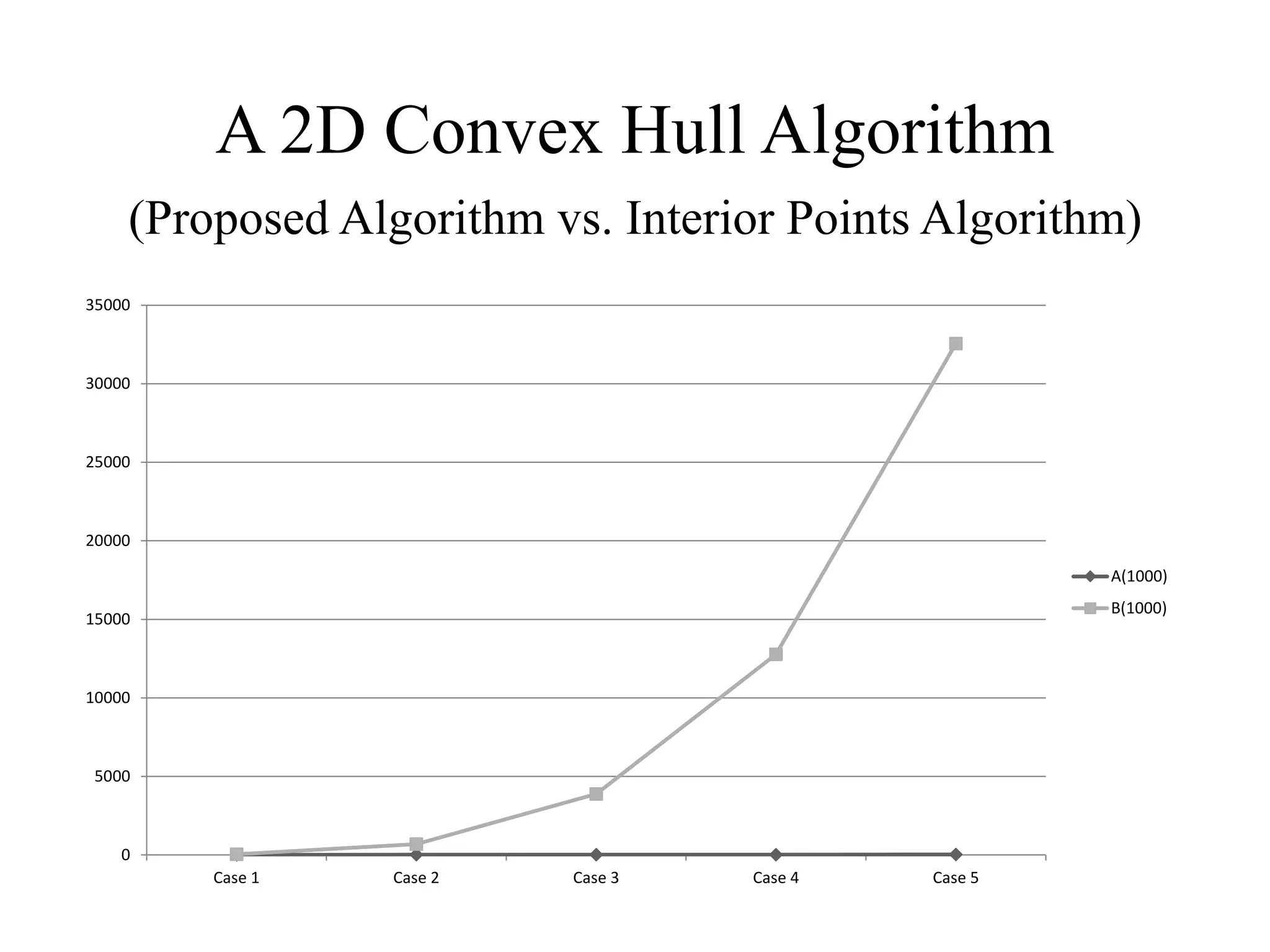

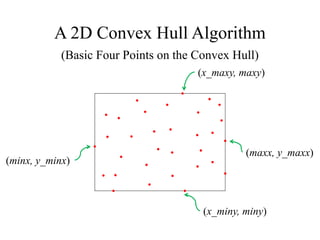
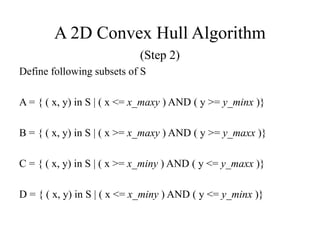
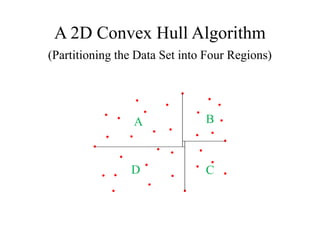
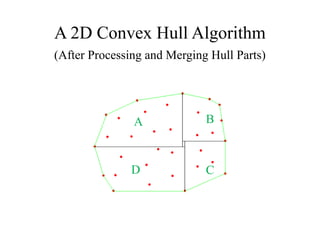
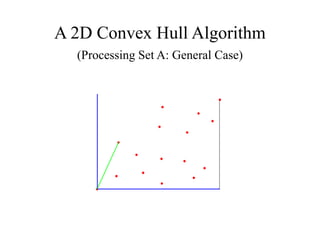
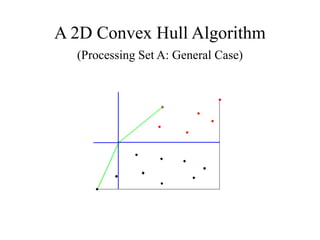
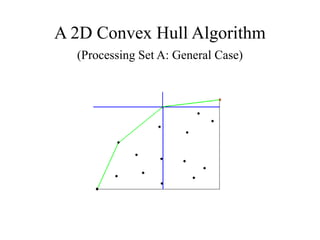
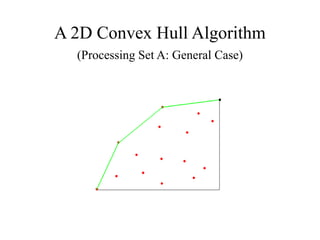
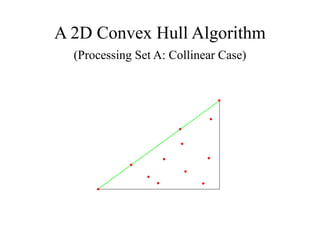
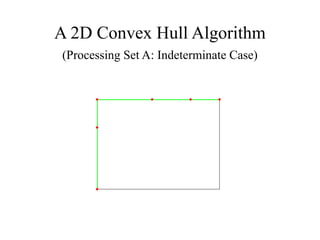
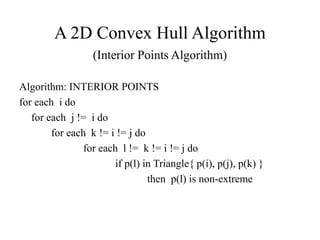
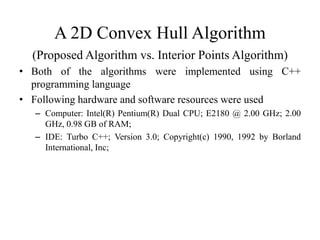
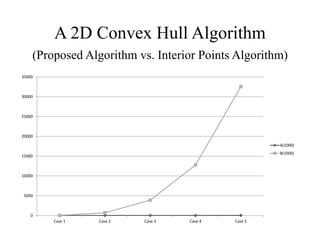
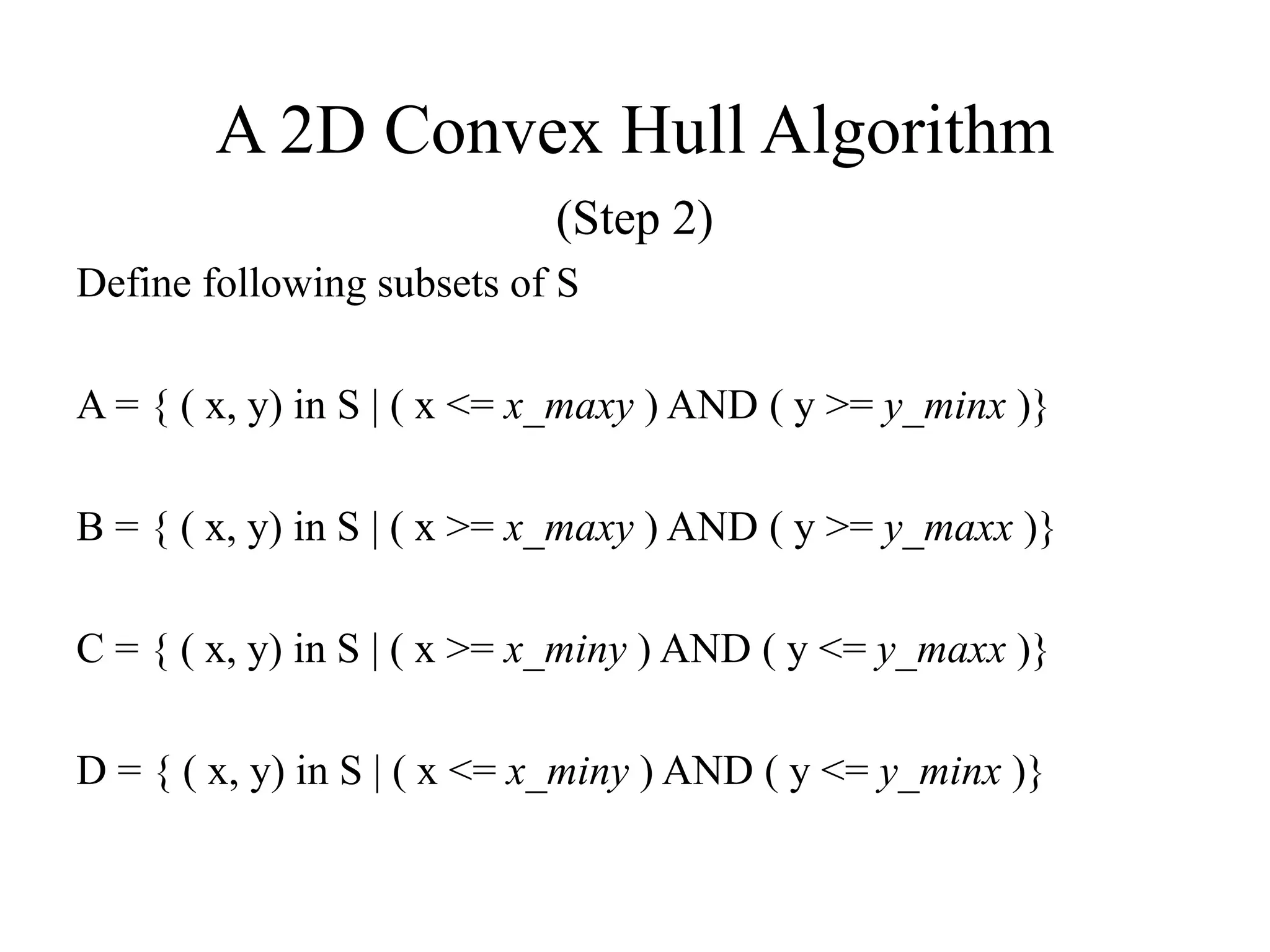
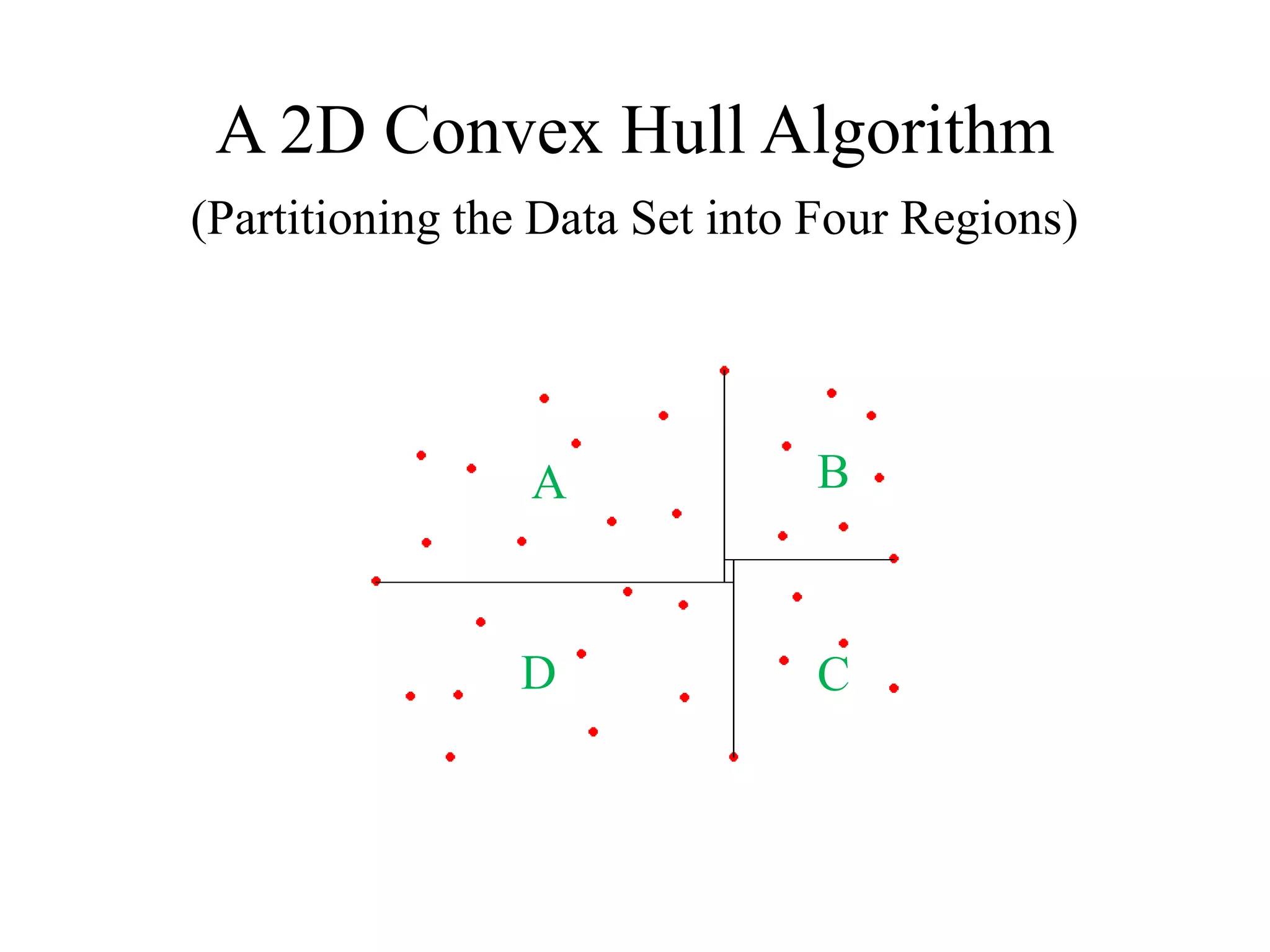
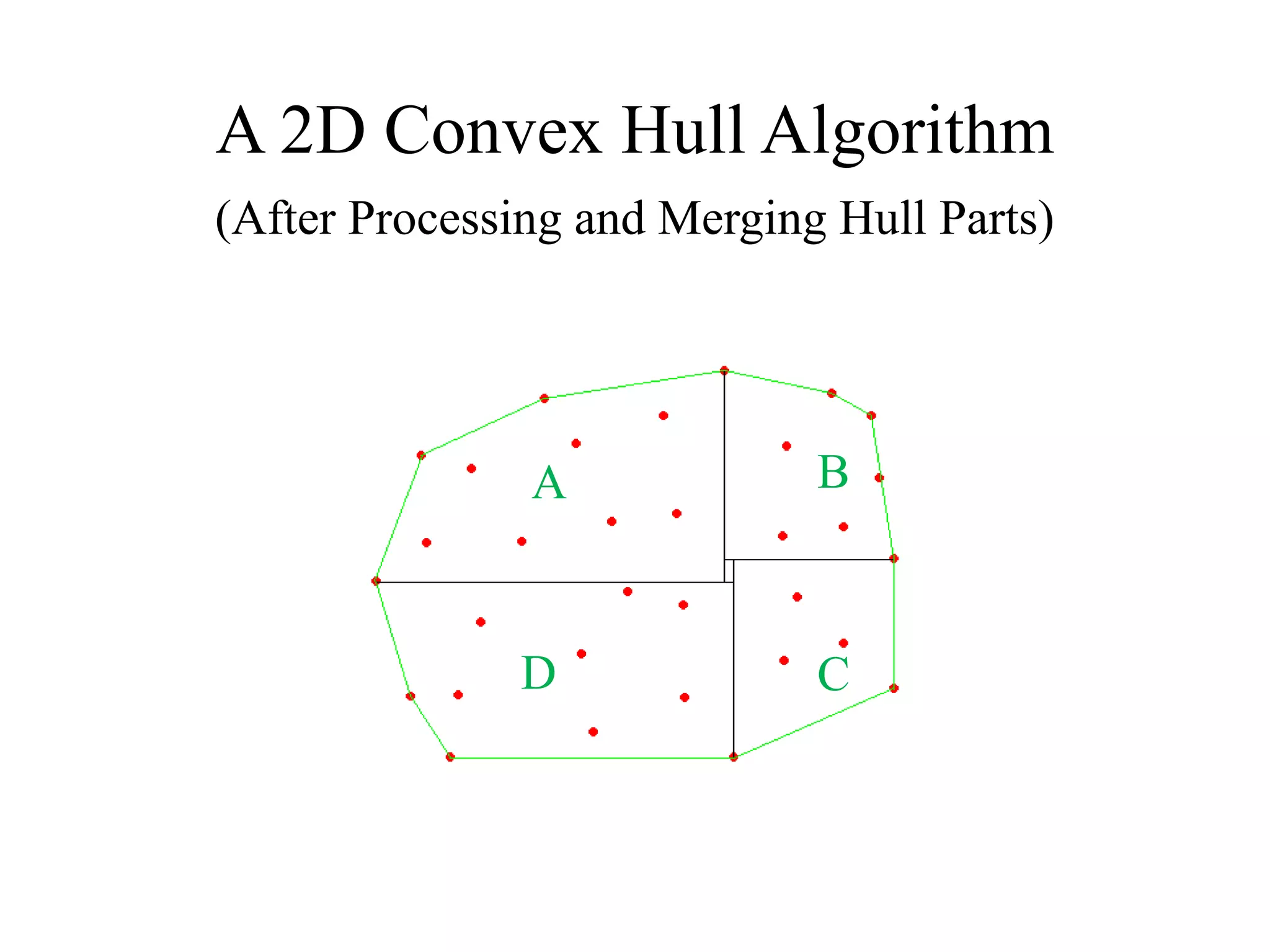
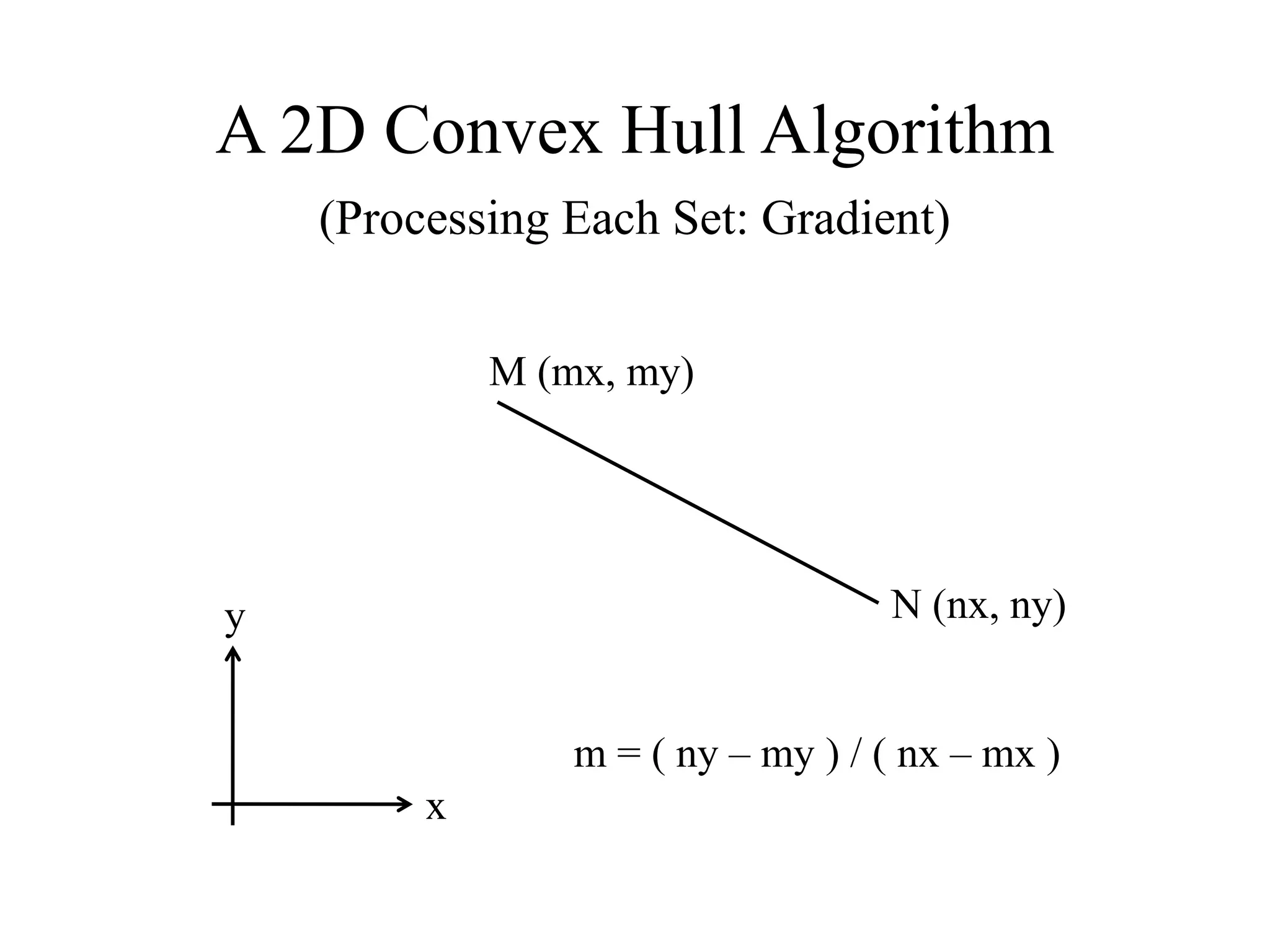
This document presents an efficient convex hull algorithm for finding the convex hull of a planar set of points. The algorithm partitions the set of points into four regions based on the minimum and maximum x and y coordinates. It then finds the convex hull parts belonging to each region in parallel. Those parts are merged to derive the full convex hull. For each region, the algorithm uses a modified gradient concept to efficiently process the points and find the boundary points of the convex hull part. The algorithm achieves parallelism, data reduction, and has lower computational cost compared to traditional interior points algorithms. However, its drawbacks include difficulty extending it to higher dimensions and its static nature which requires the entire dataset from the beginning.




















































![On the Convex Layers of a Planer Dynamic Set of Points [Short Version]](https://cdn.slidesharecdn.com/ss_thumbnails/mphillayersmod1f-180628051342-thumbnail.jpg?width=600ounds&width=560&fit=bounds)



























![Assignment for Factory Method Design Pattern in C# [ANSWERS]](https://cdn.slidesharecdn.com/ss_thumbnails/assingment1answers-200420114633-thumbnail.jpg?width=600ounds&width=560&fit=bounds)



![Agentic Systems and Compliance - A brief intro [1.2]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticsystemsandcompliace-1-251018025303-958a42ec-thumbnail.jpg?width=600ounds&width=560&fit=bounds)






![RTP_AR_Basic_Learners' Workbook_KS2 [FOR REPRODUCTION] (1).pdf](https://cdn.slidesharecdn.com/ss_thumbnails/rtparbasiclearnersworkbookks2forreproduction1-251016024943-e51a16ac-thumbnail.jpg?width=600ounds&width=560&fit=bounds)










