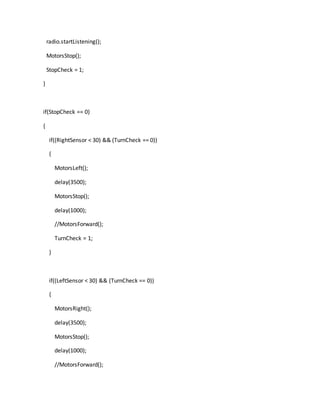
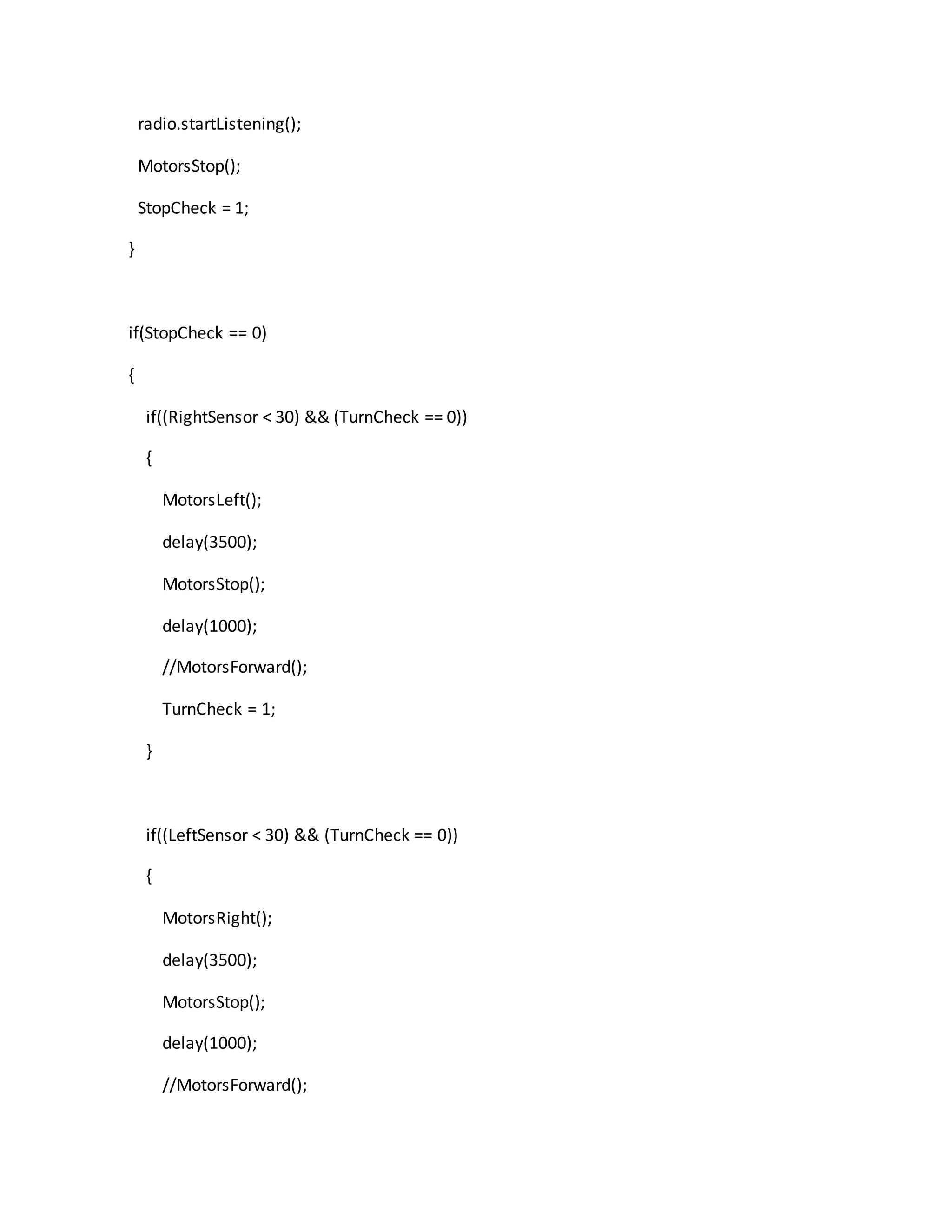
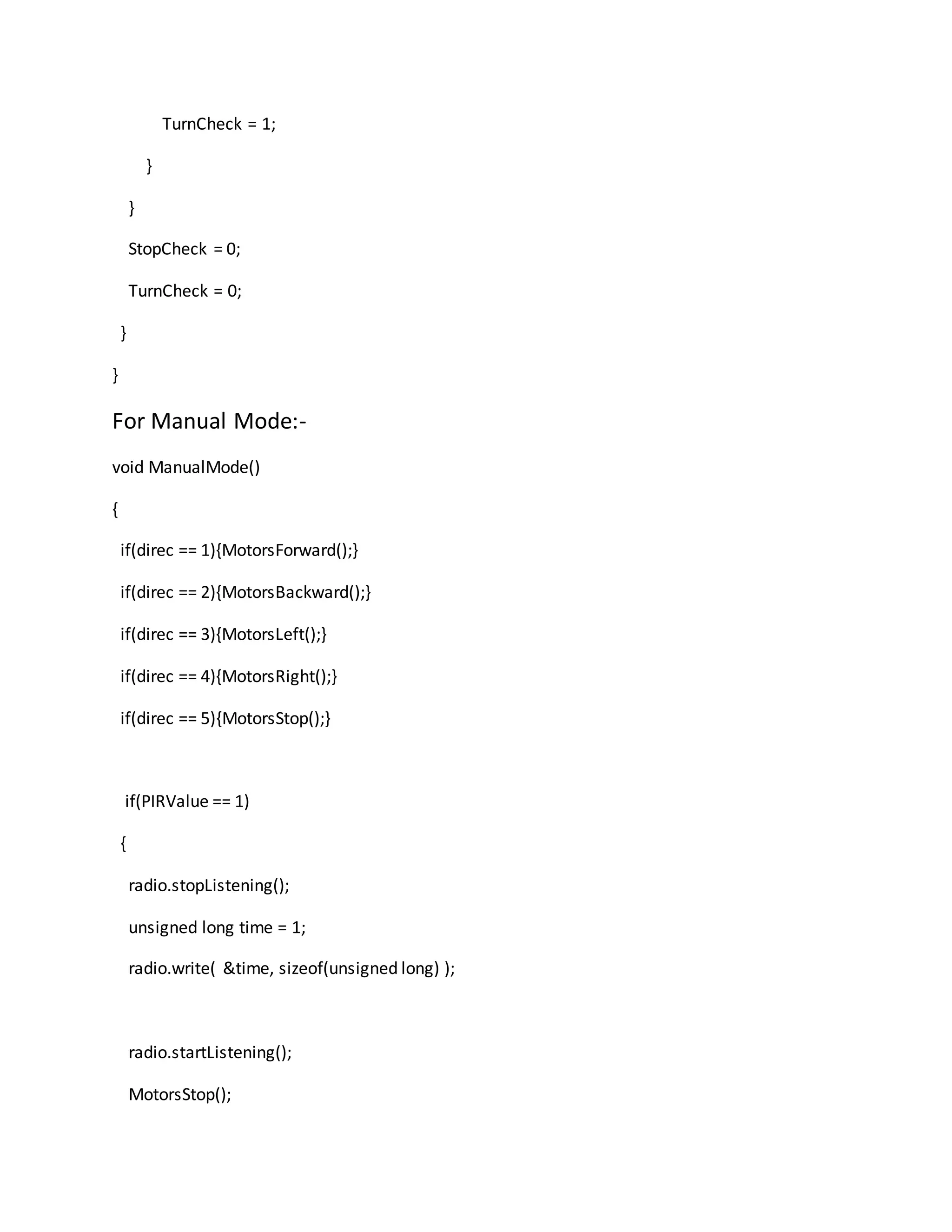
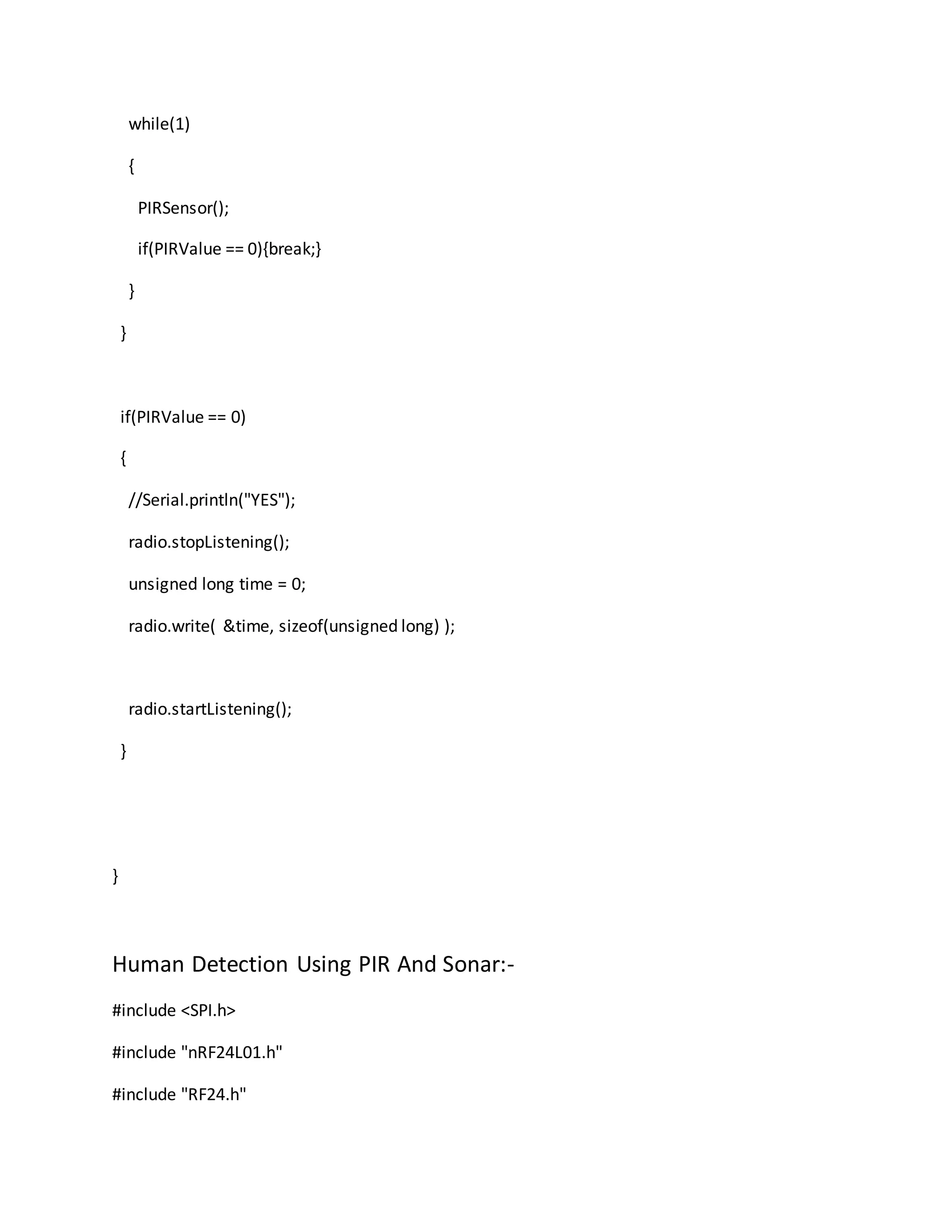
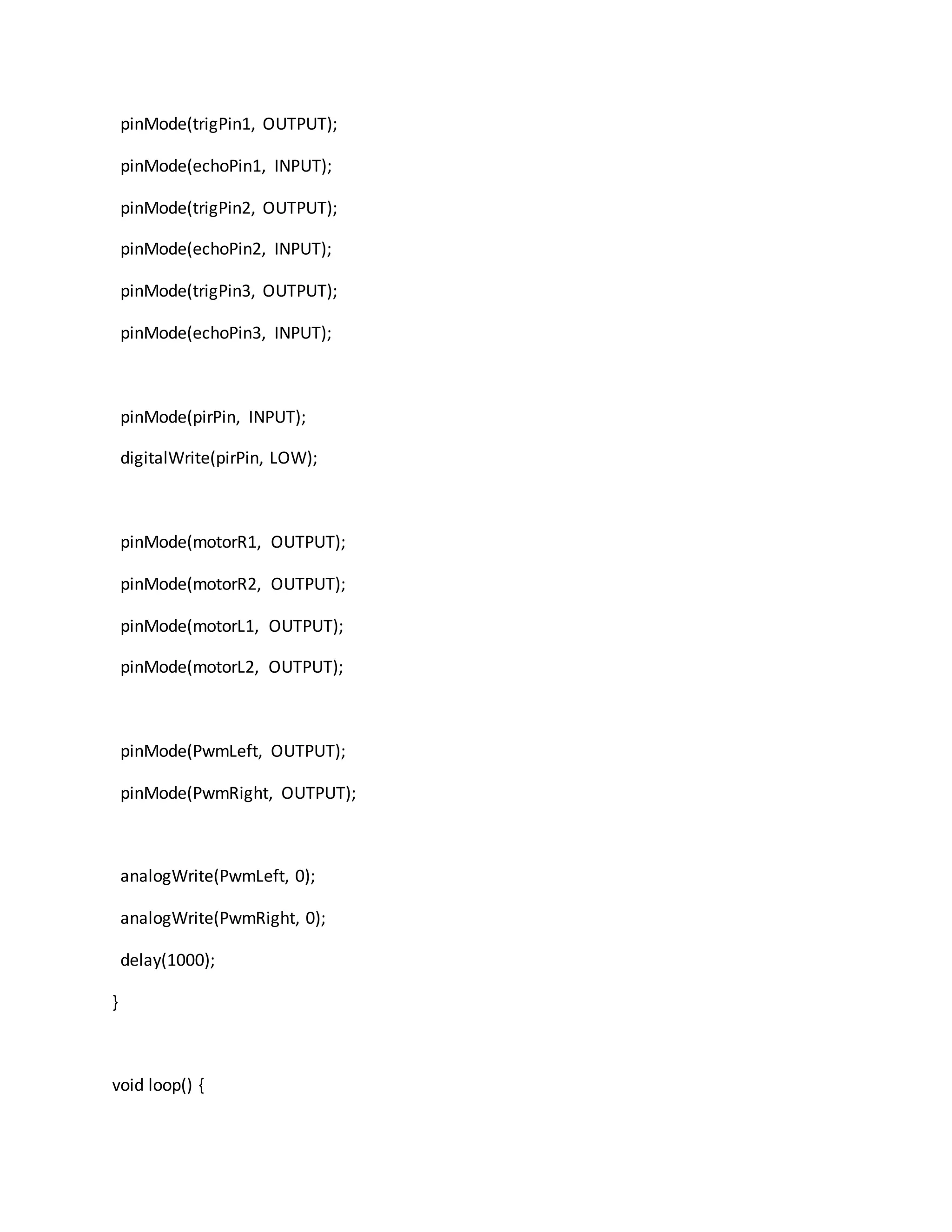
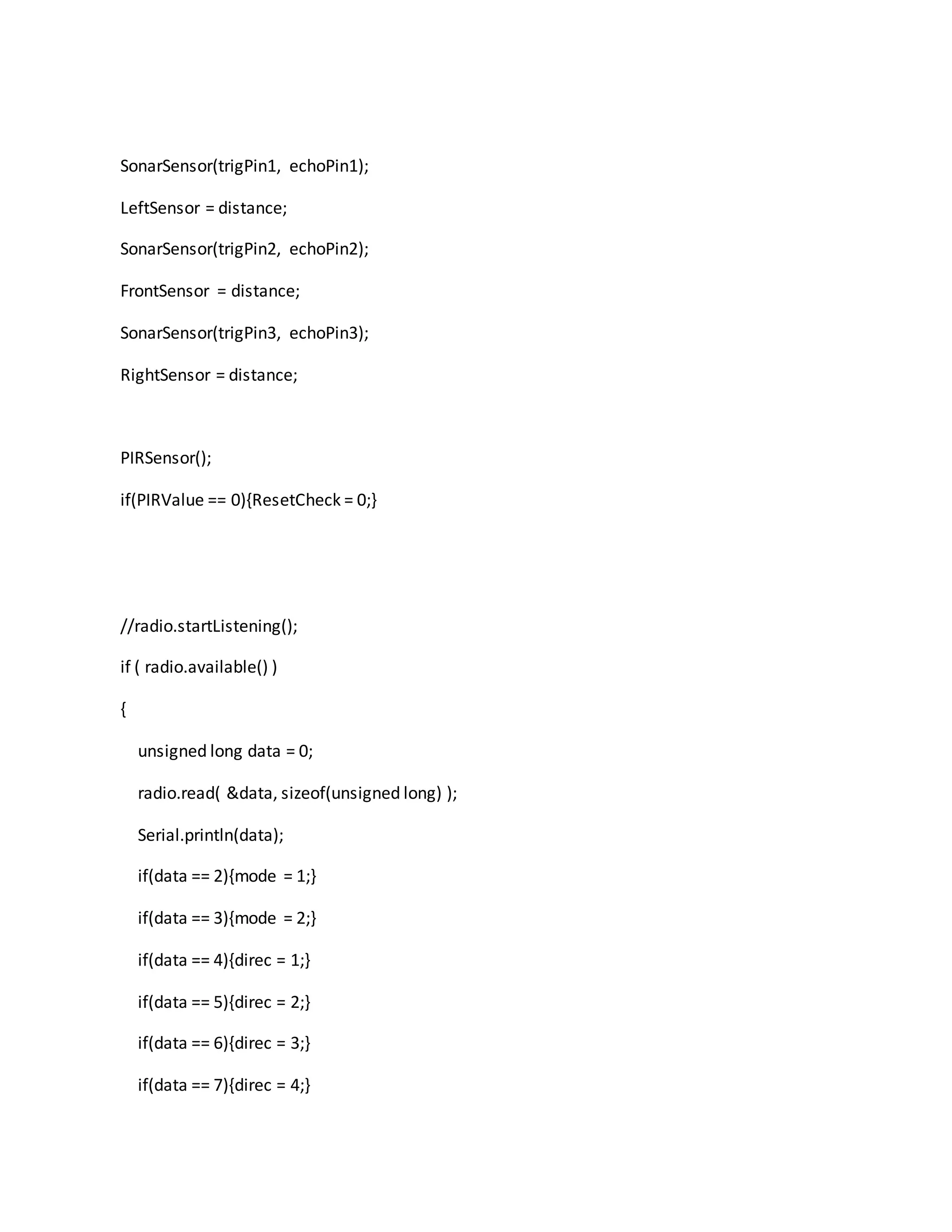
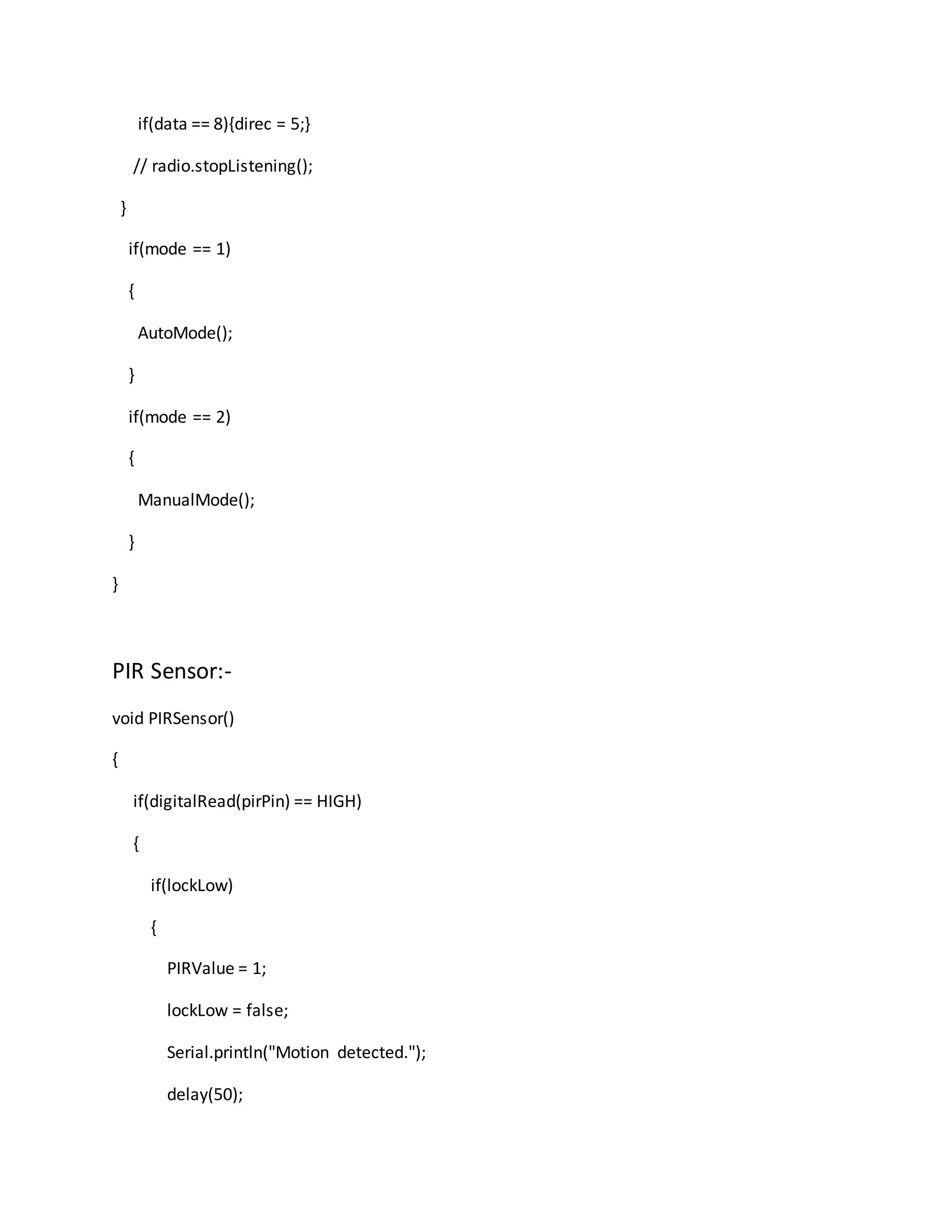
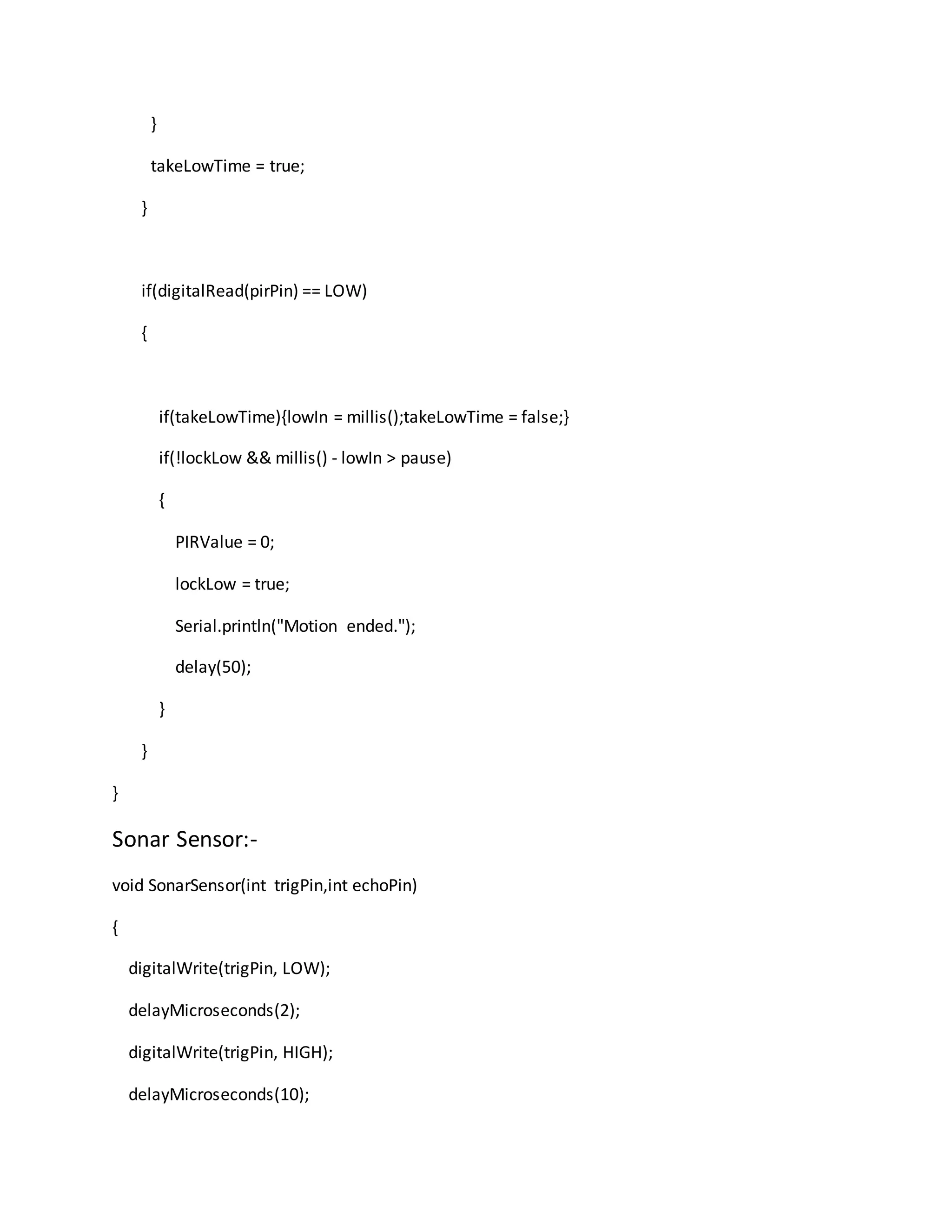
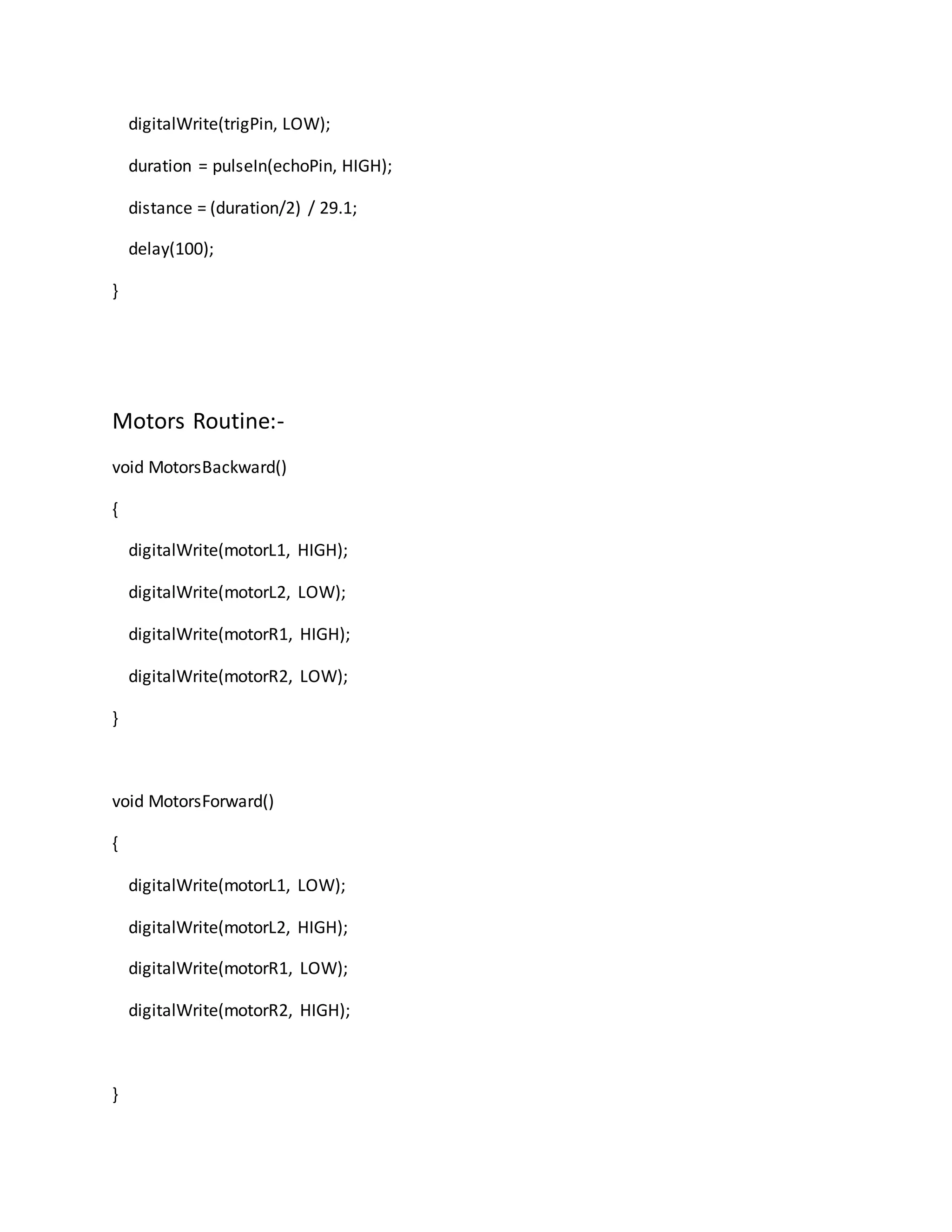
The document describes code for an Arduino project that uses a PIR sensor and sonar sensors to detect humans. It includes code for an auto mode and manual mode, with the auto mode using sensors to control motors and the manual mode allowing control via radio signals. Functions are defined for the sensors, motors and radio communication.





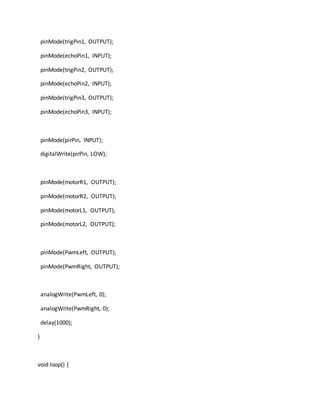
![RF24 radio(9,10);
const uint64_t pipes[2] = { 0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
#define trigPin1 4
#define echoPin1 6
#define trigPin2 7
#define echoPin2 8
#define trigPin3 A4
#define echoPin3 A5
#define pirPin 2
#define motorR1 A0
#define motorR2 A1
#define motorL1 A3
#define motorL2 A2
#define PwmLeft 3
#define PwmRight 5
int calibrationTime = 30;](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/85/CODING-IN-ARDUINO-7-320.jpg)
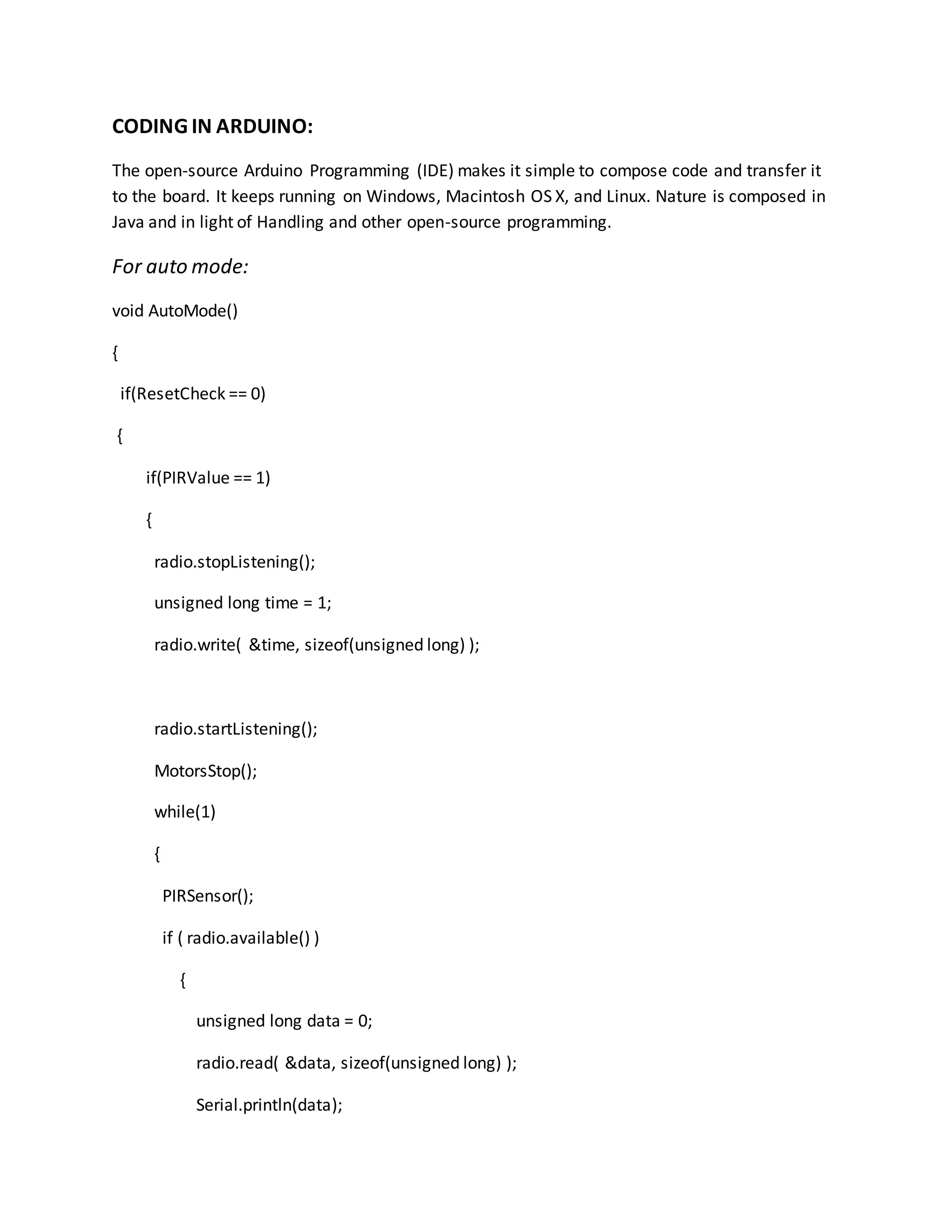
![long unsigned int lowIn;
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int PIRValue = 0;
long duration, distance, RightSensor,FrontSensor,LeftSensor;
int TurnCheck = 0;
int mode = 0;
int direc = 0;
int StopCheck = 0;
int ResetCheck = 0;
void setup()
{
Serial.begin(57600);
radio.begin();
radio.setRetries(15,15);
radio.openReadingPipe(1,pipes[1]);
radio.startListening();
radio.printDetails();
radio.openWritingPipe(pipes[0]);
radio.openReadingPipe(1,pipes[1]);](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/85/CODING-IN-ARDUINO-8-320.jpg)





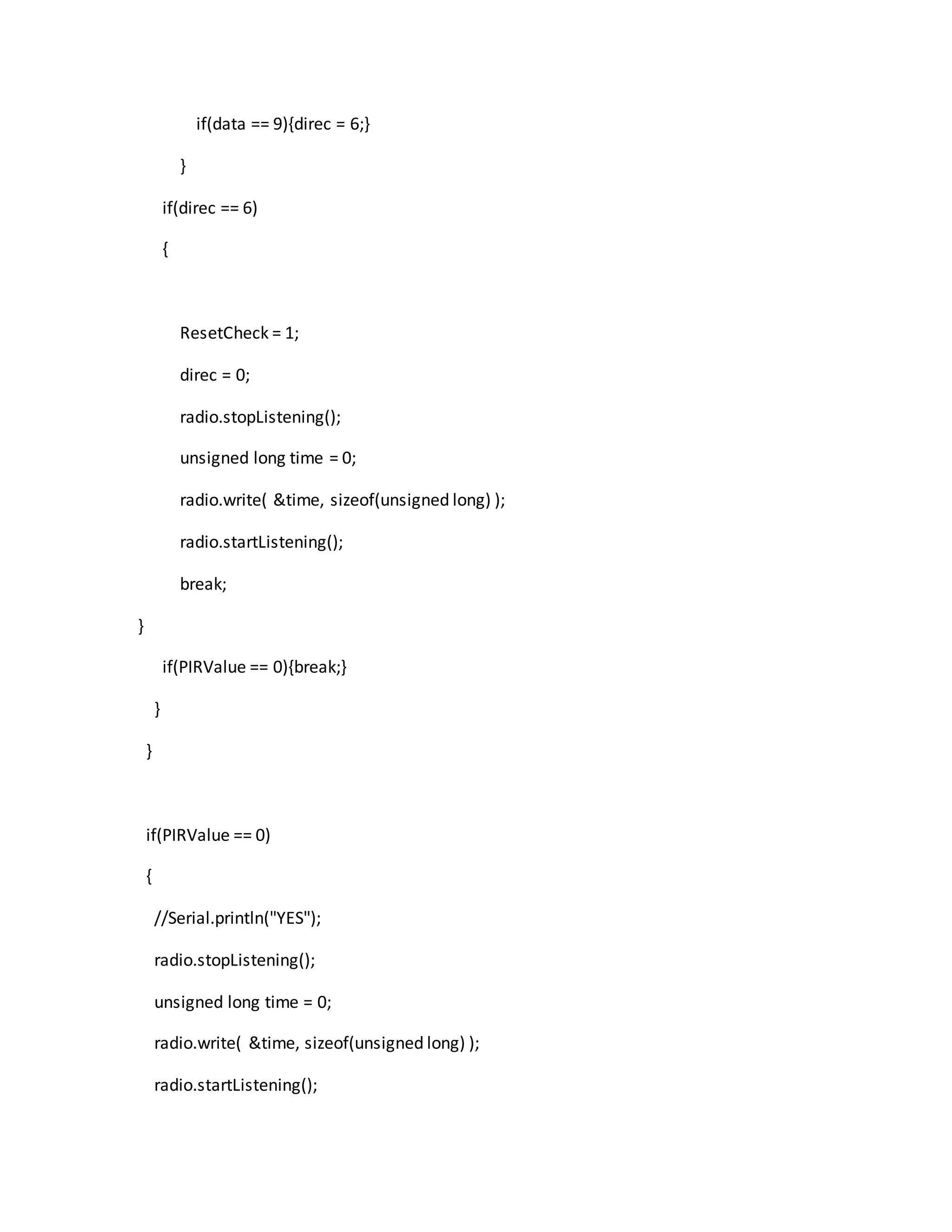
![Human Detection Using Sonar and PIR :-
#include <SPI.h>
#include "nRF24L01.h"
#include "RF24.h"
int buzzer = 8;
RF24 radio(9,10);
const uint64_t pipes[2] = { 0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
typedef enum { role_ping_out = 1, role_pong_back } role_e;
const char* role_friendly_name[] = { "invalid", "Ping out", "Pong back"};
role_e role = role_pong_back;
void setup(void)
{
Serial.begin(9600);
pinMode(buzzer,OUTPUT);
digitalWrite(buzzer,HIGH);
radio.begin();
radio.setRetries(15,15);
radio.openReadingPipe(1,pipes[1]);
radio.startListening();
radio.printDetails();
radio.openWritingPipe(pipes[1]);](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/85/CODING-IN-ARDUINO-15-320.jpg)
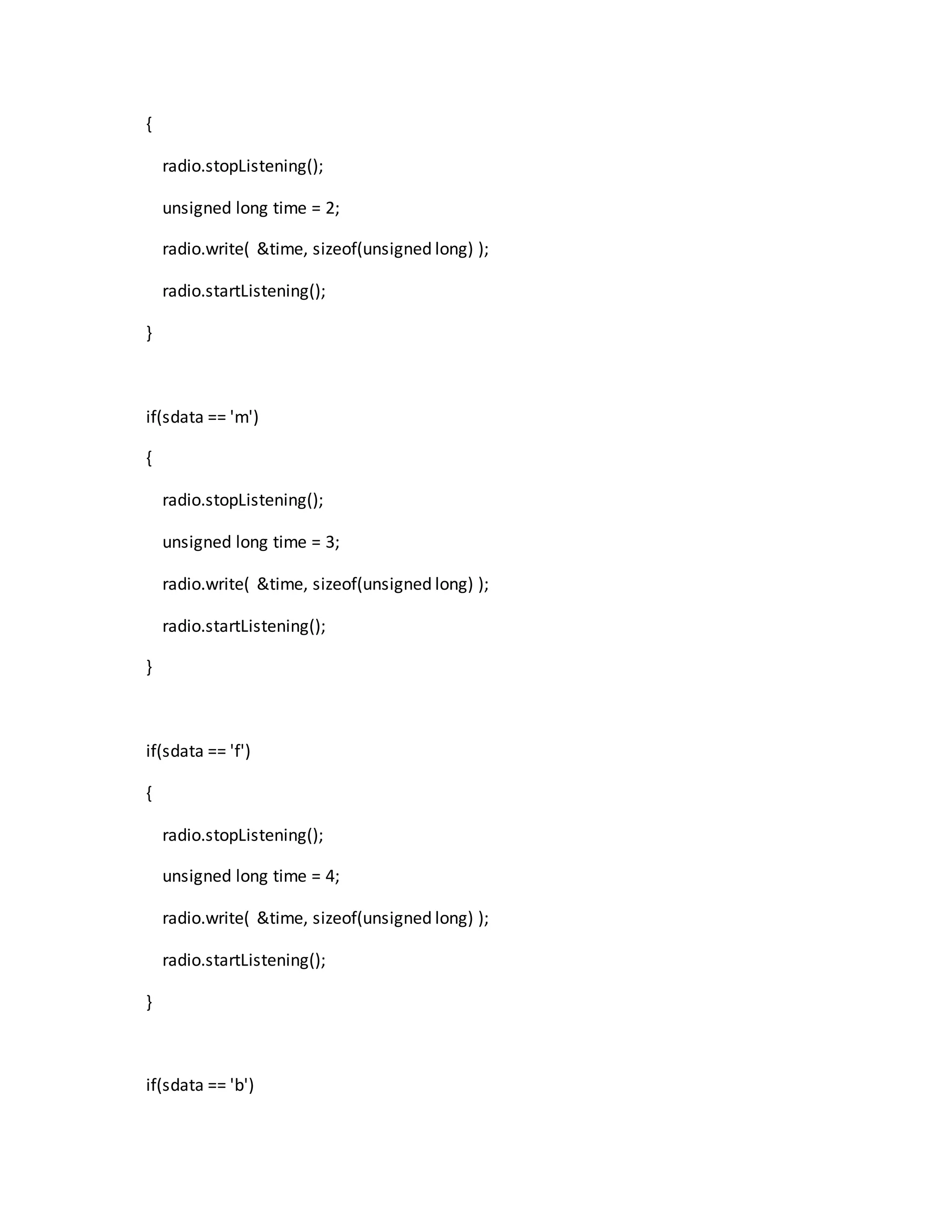
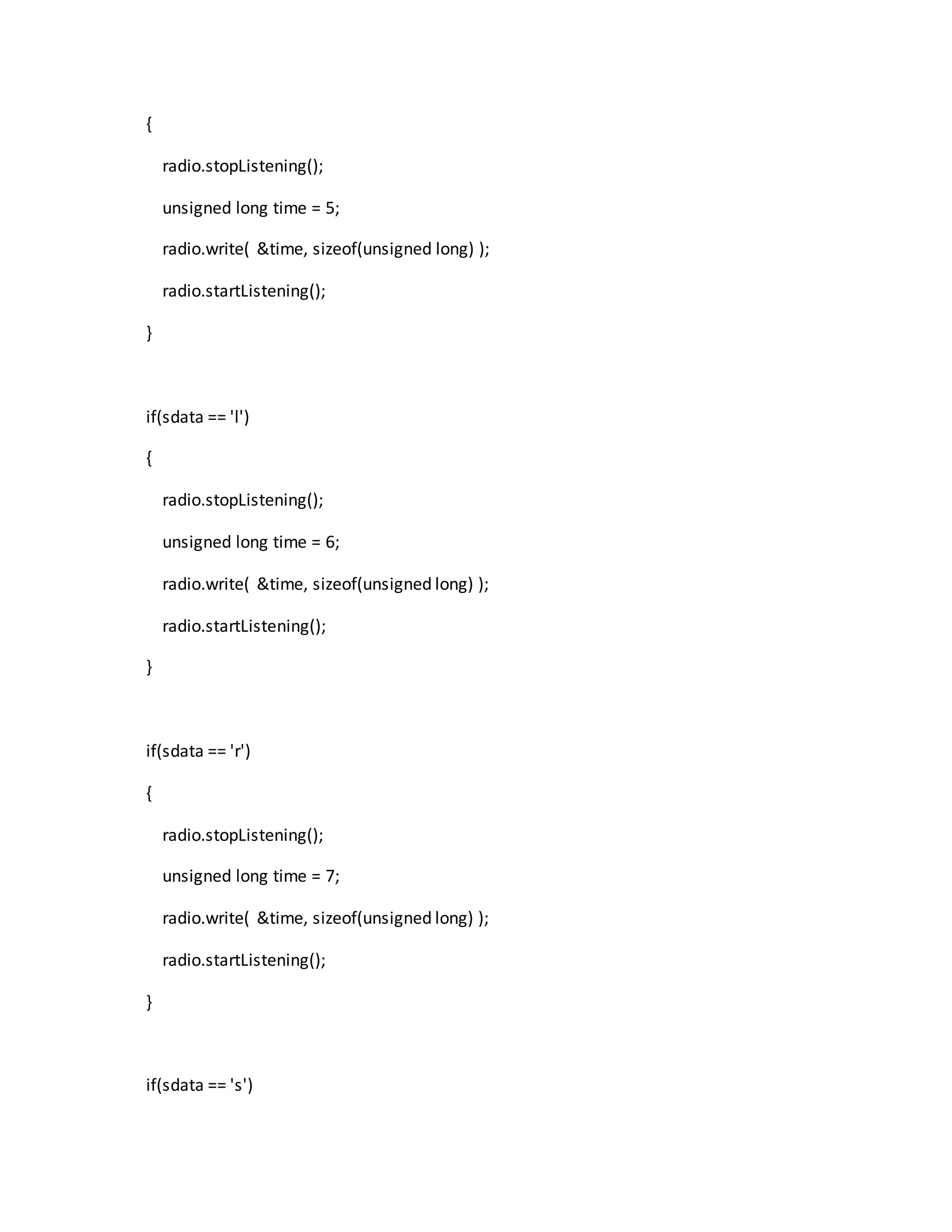
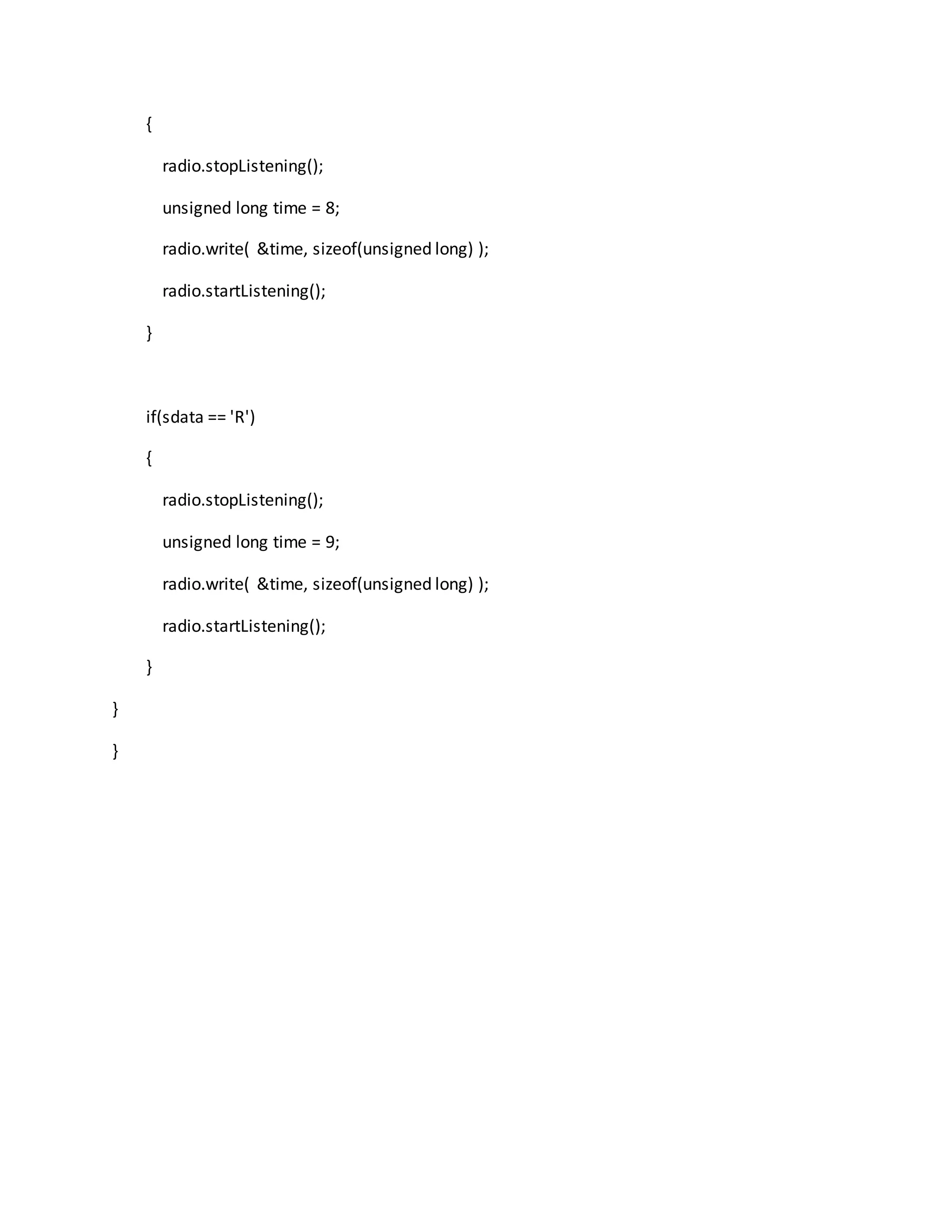
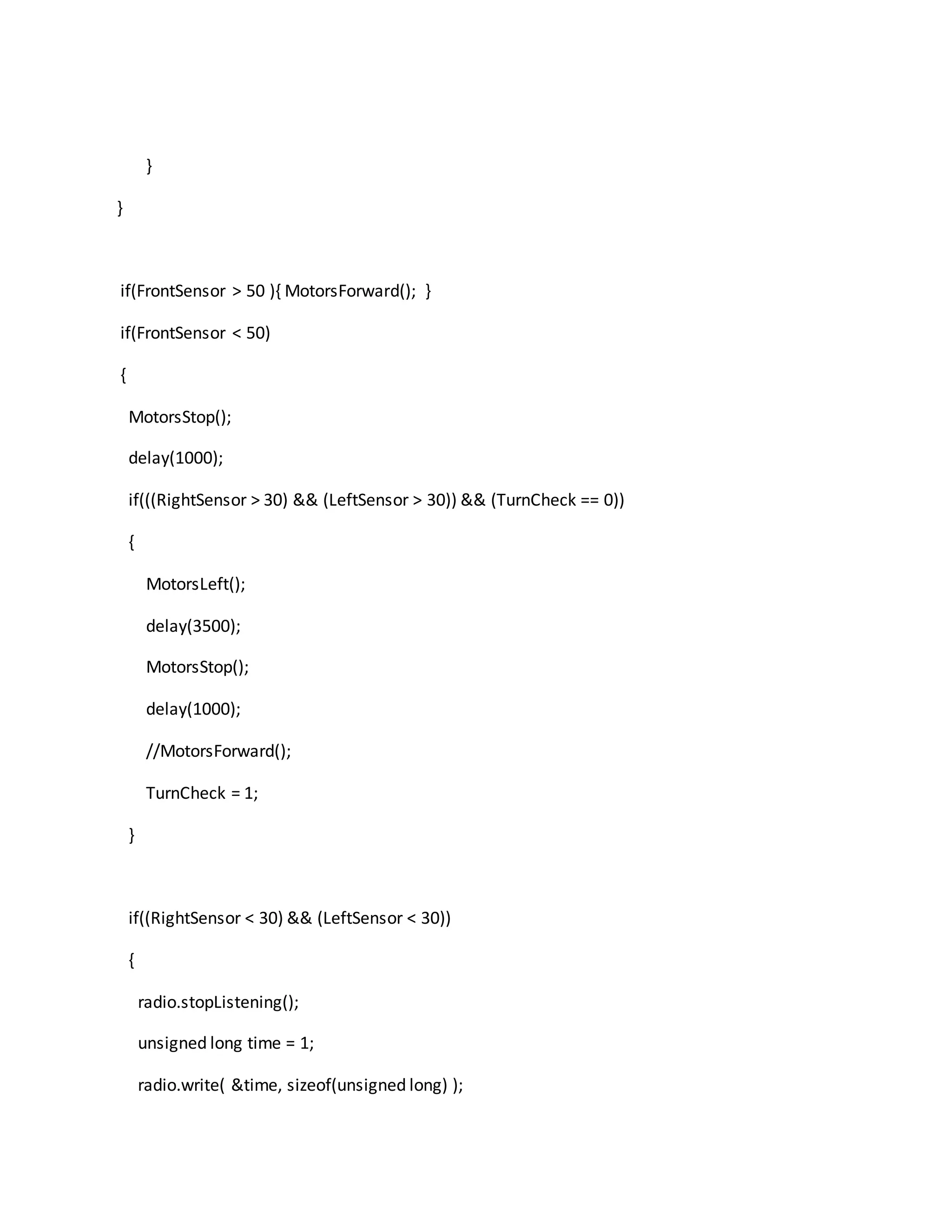
![radio.openReadingPipe(1,pipes[0]);
}
void loop(void)
{
if ( radio.available() )
{
unsigned long data = 0;
radio.read( &data, sizeof(unsigned long) );
Serial.println(data);
if(data == 1)
{digitalWrite(buzzer,LOW);
}
if(data == 0)
{digitalWrite(buzzer,HIGH);
}
}
if(Serial.available())
{
char sdata = Serial.read();
if(sdata == 'a')](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/85/CODING-IN-ARDUINO-16-320.jpg)



![RF24 radio(9,10);
const uint64_t pipes[2] = { 0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
#define trigPin1 4
#define echoPin1 6
#define trigPin2 7
#define echoPin2 8
#define trigPin3 A4
#define echoPin3 A5
#define pirPin 2
#define motorR1 A0
#define motorR2 A1
#define motorL1 A3
#define motorL2 A2
#define PwmLeft 3
#define PwmRight 5
int calibrationTime = 30;](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/75/CODING-IN-ARDUINO-7-2048.jpg)
![long unsigned int lowIn;
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int PIRValue = 0;
long duration, distance, RightSensor,FrontSensor,LeftSensor;
int TurnCheck = 0;
int mode = 0;
int direc = 0;
int StopCheck = 0;
int ResetCheck = 0;
void setup()
{
Serial.begin(57600);
radio.begin();
radio.setRetries(15,15);
radio.openReadingPipe(1,pipes[1]);
radio.startListening();
radio.printDetails();
radio.openWritingPipe(pipes[0]);
radio.openReadingPipe(1,pipes[1]);](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/75/CODING-IN-ARDUINO-8-2048.jpg)
![Human Detection Using Sonar and PIR :-
#include <SPI.h>
#include "nRF24L01.h"
#include "RF24.h"
int buzzer = 8;
RF24 radio(9,10);
const uint64_t pipes[2] = { 0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
typedef enum { role_ping_out = 1, role_pong_back } role_e;
const char* role_friendly_name[] = { "invalid", "Ping out", "Pong back"};
role_e role = role_pong_back;
void setup(void)
{
Serial.begin(9600);
pinMode(buzzer,OUTPUT);
digitalWrite(buzzer,HIGH);
radio.begin();
radio.setRetries(15,15);
radio.openReadingPipe(1,pipes[1]);
radio.startListening();
radio.printDetails();
radio.openWritingPipe(pipes[1]);](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/75/CODING-IN-ARDUINO-15-2048.jpg)
![radio.openReadingPipe(1,pipes[0]);
}
void loop(void)
{
if ( radio.available() )
{
unsigned long data = 0;
radio.read( &data, sizeof(unsigned long) );
Serial.println(data);
if(data == 1)
{digitalWrite(buzzer,LOW);
}
if(data == 0)
{digitalWrite(buzzer,HIGH);
}
}
if(Serial.available())
{
char sdata = Serial.read();
if(sdata == 'a')](https://image.slidesharecdn.com/1ab3cb76-cf2d-4c6f-981f-57b44932a594-150729084725-lva1-app6892/75/CODING-IN-ARDUINO-16-2048.jpg)