This document provides an overview of embedded systems, including:
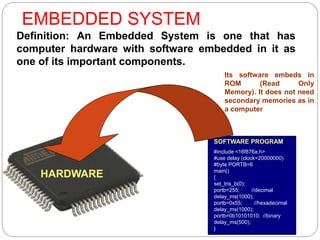
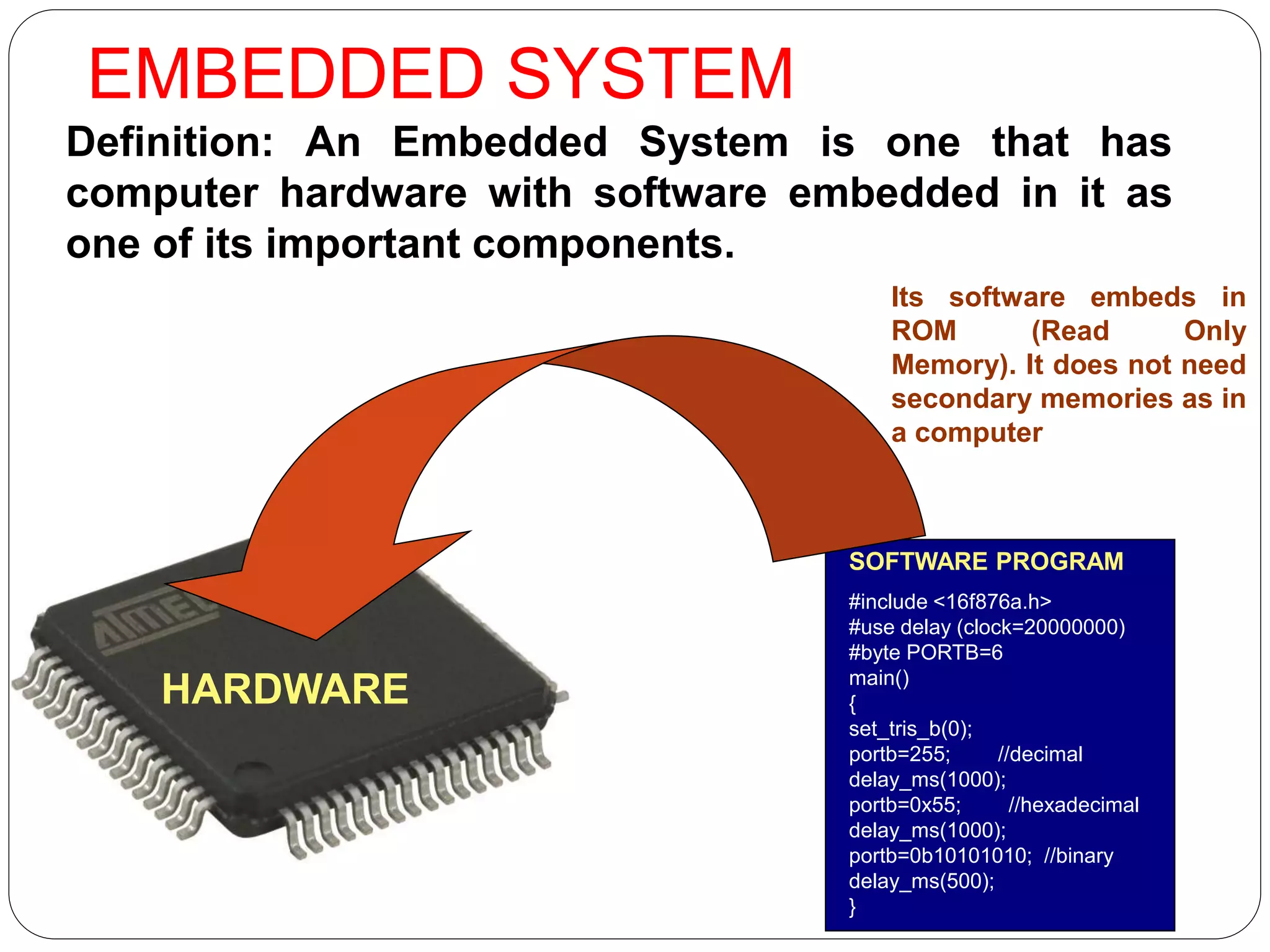
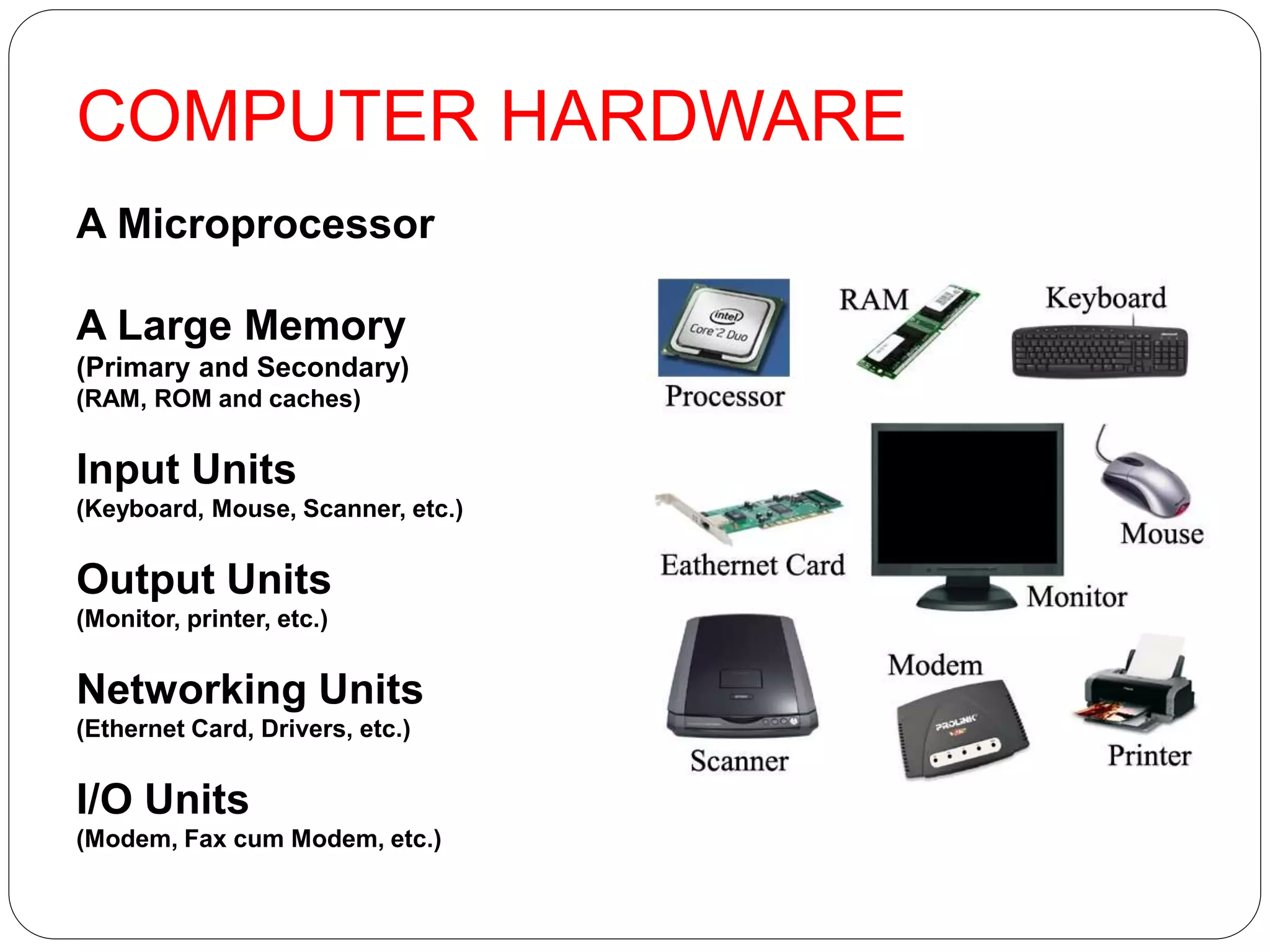
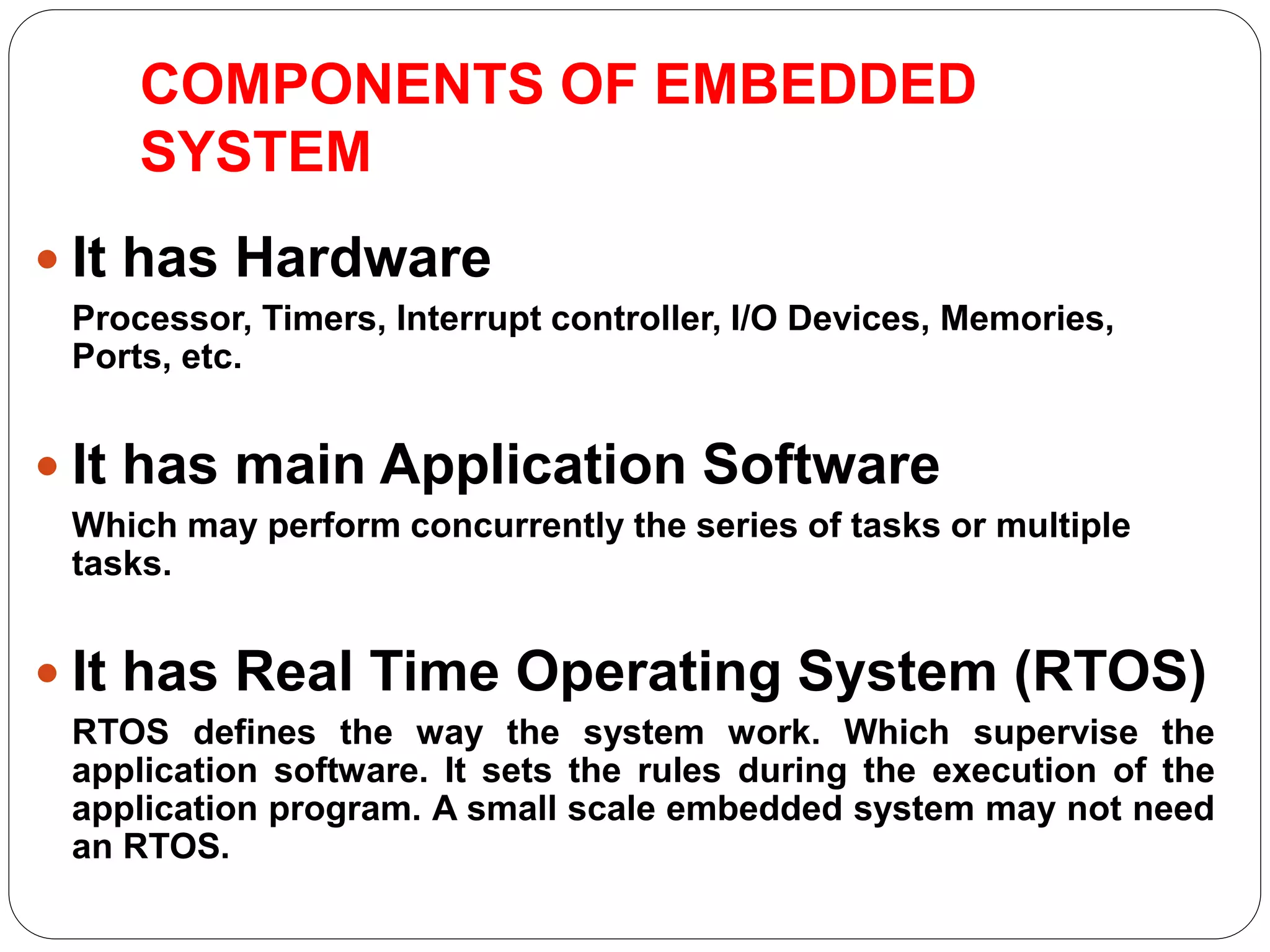
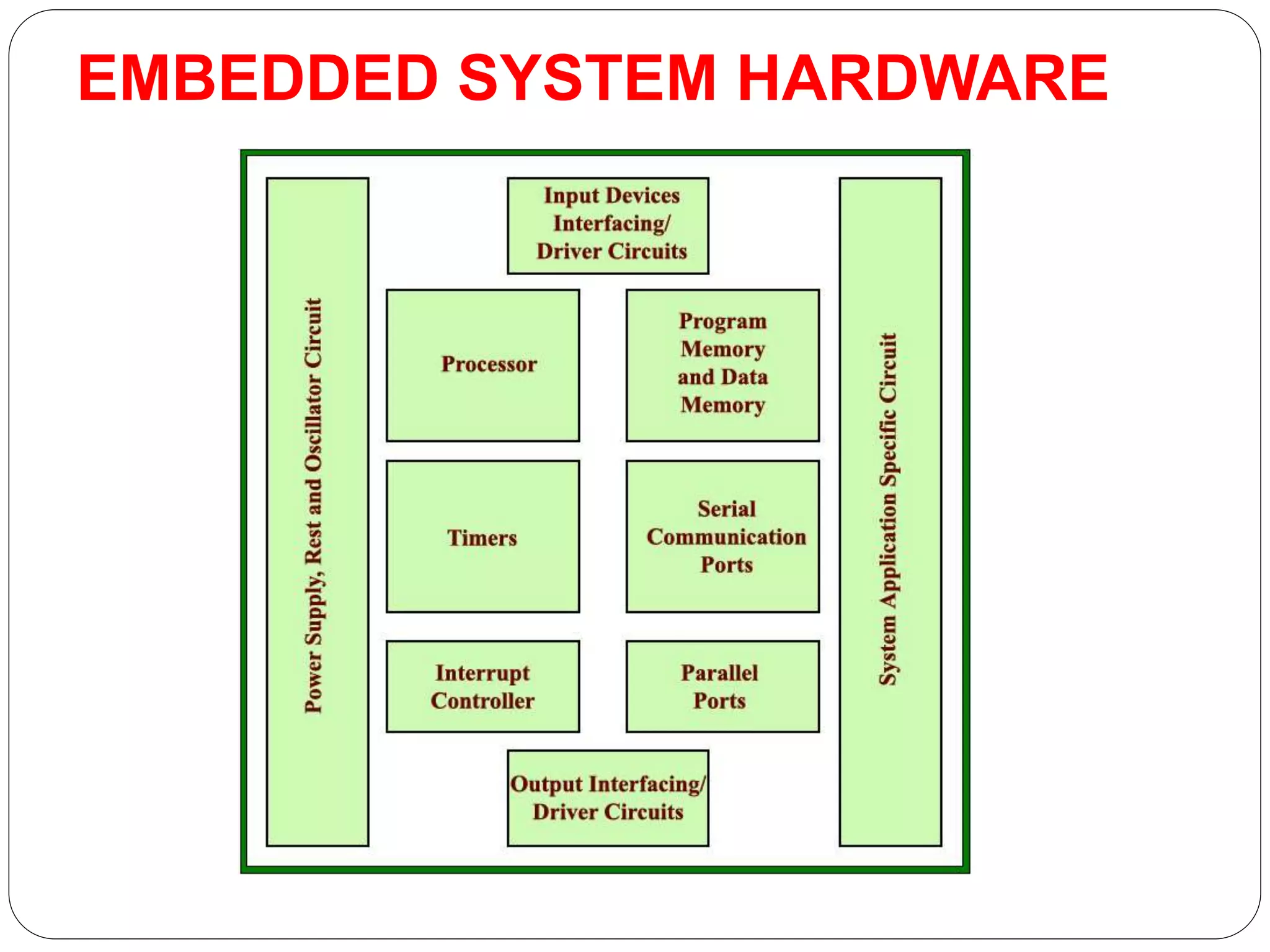
1. Embedded systems have computer hardware and software embedded as important components, with the software stored in read-only memory.
2. Embedded systems have constraints like limited memory, processor speed, and the need to limit power dissipation.
3. Embedded systems can be classified as small, medium, or sophisticated based on their hardware and software complexity. Small systems typically use a microcontroller and C for development.