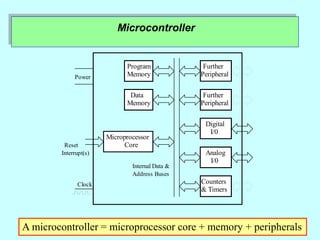
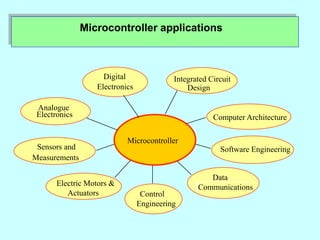
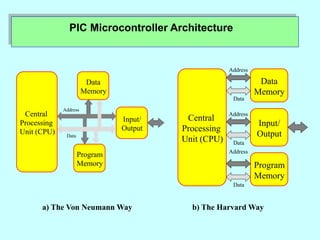
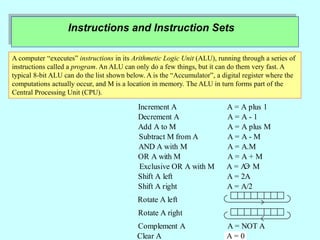
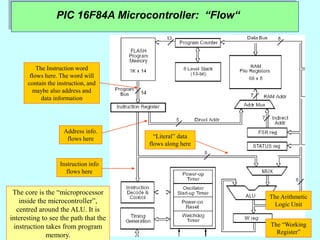
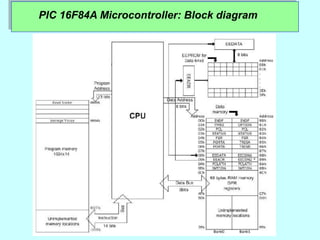
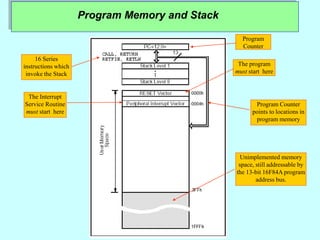
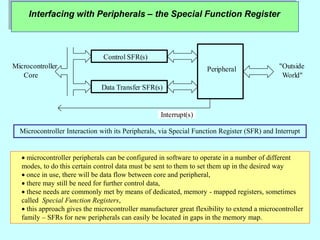
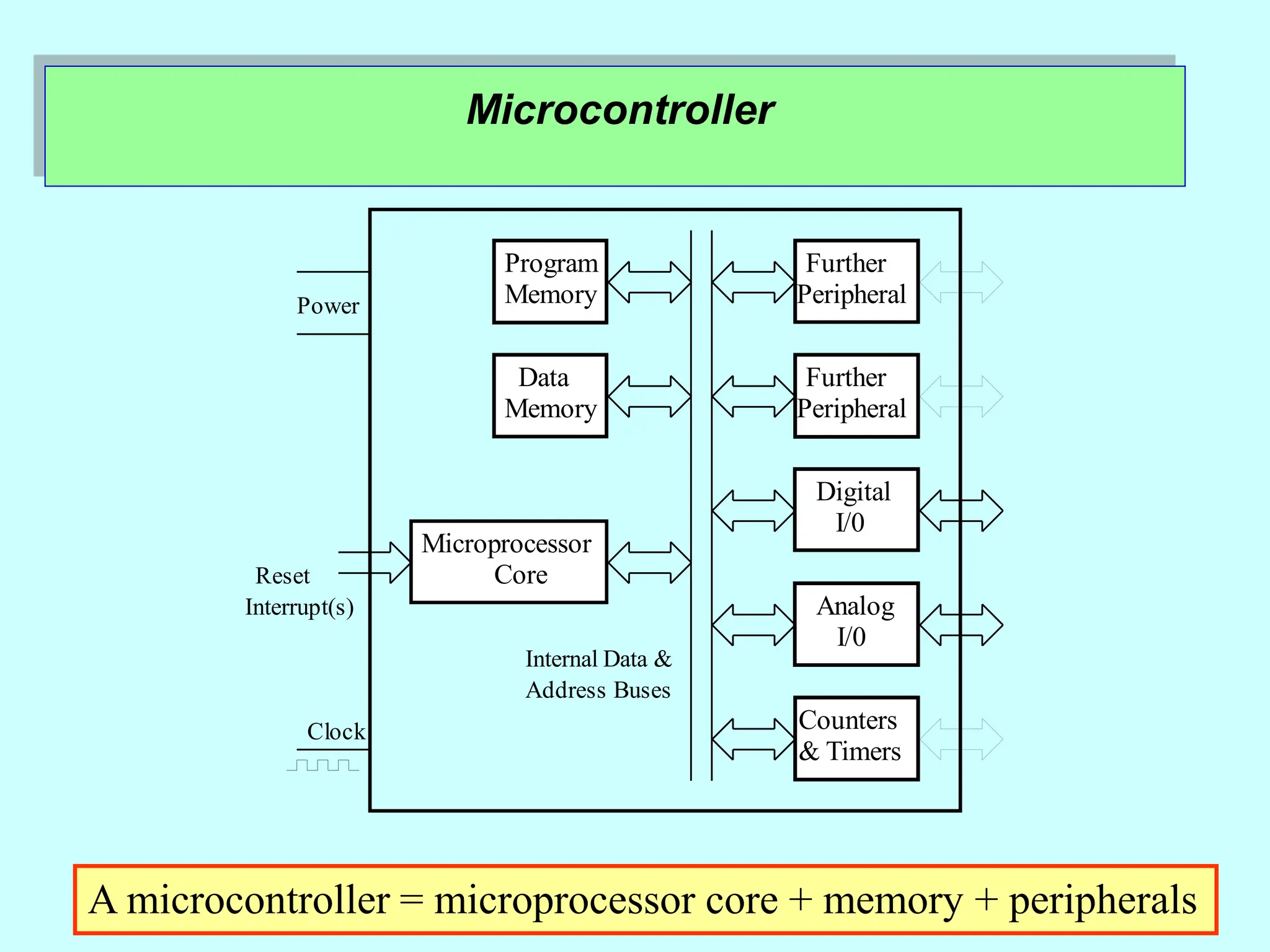
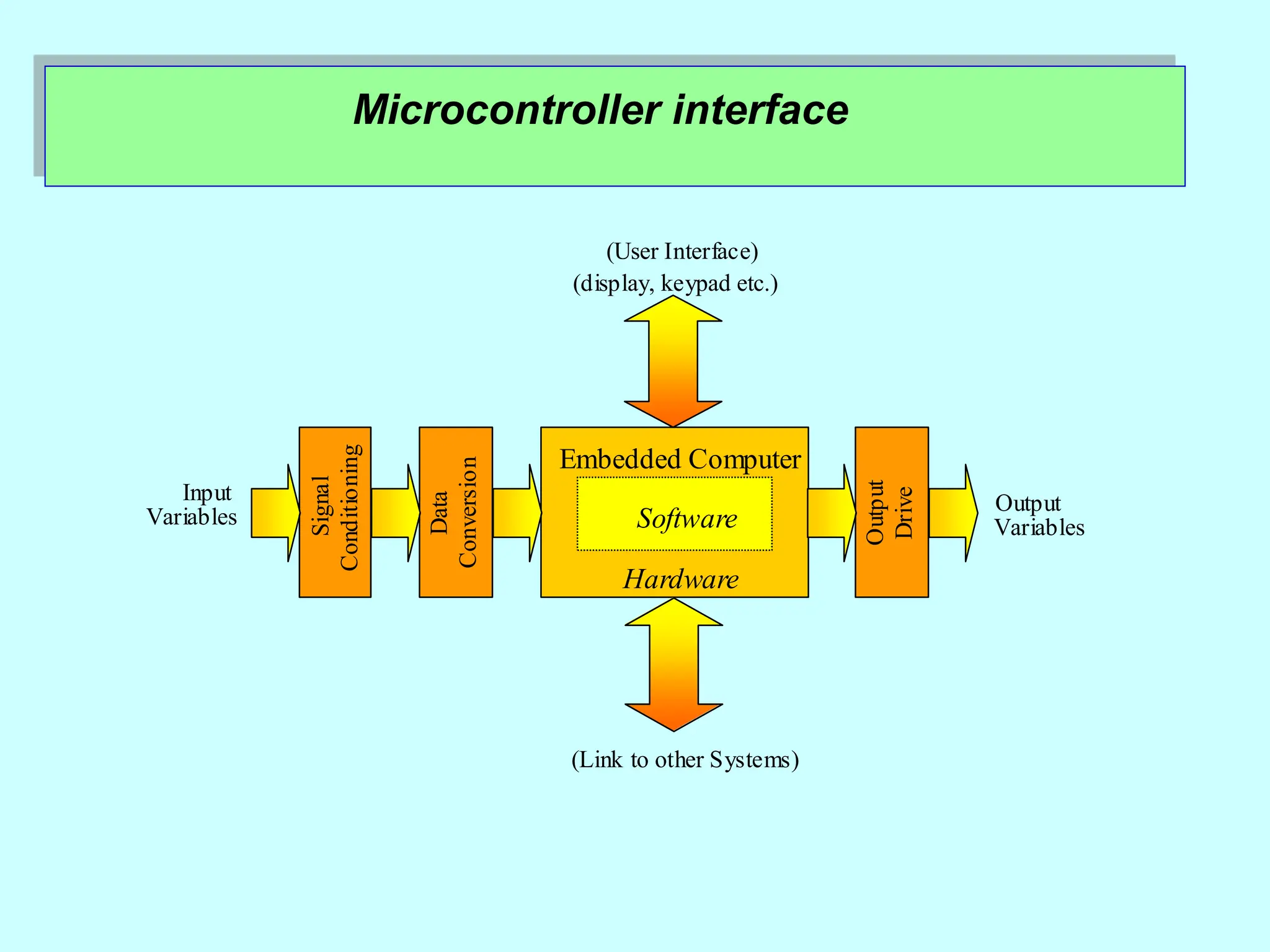
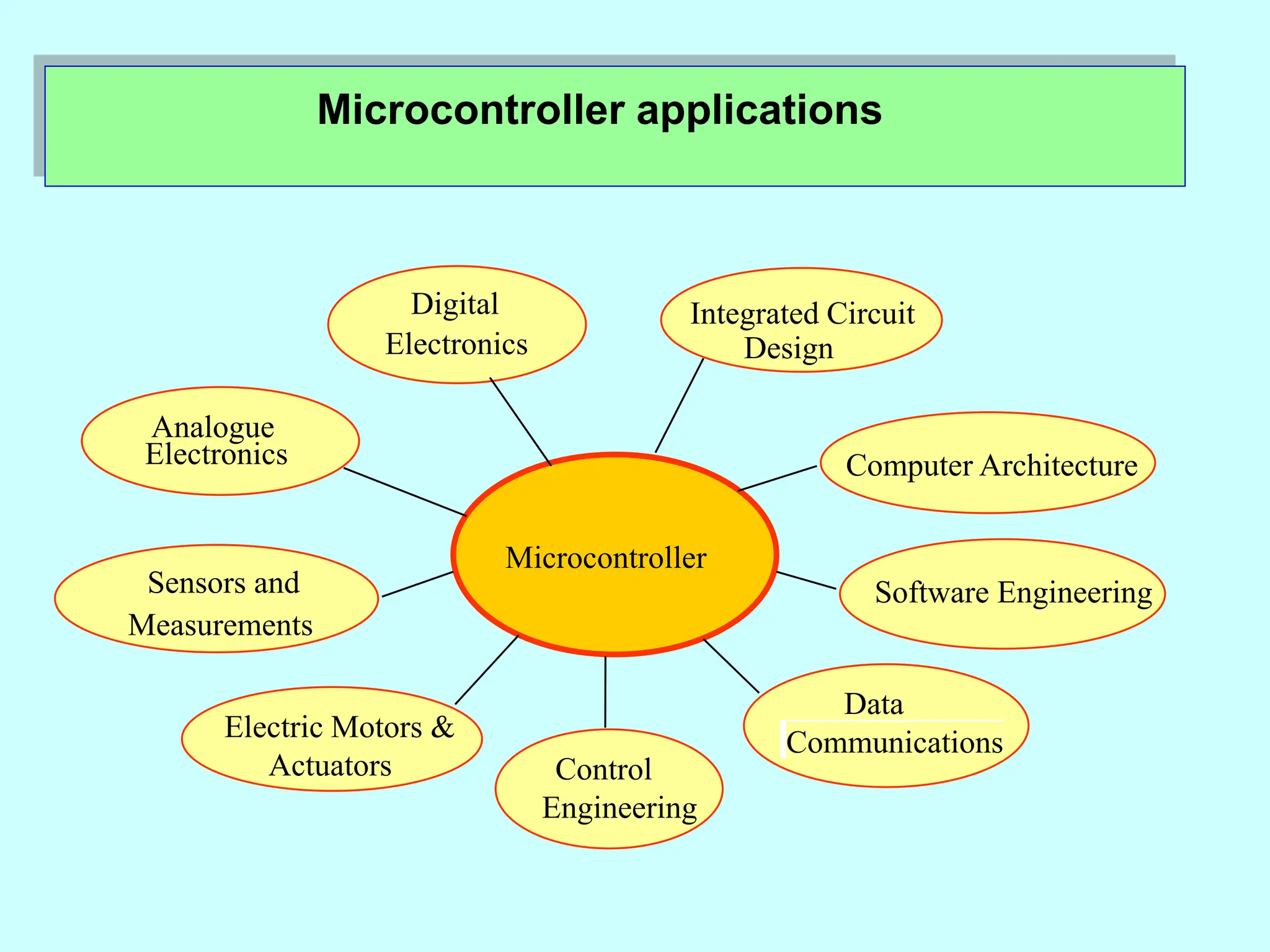
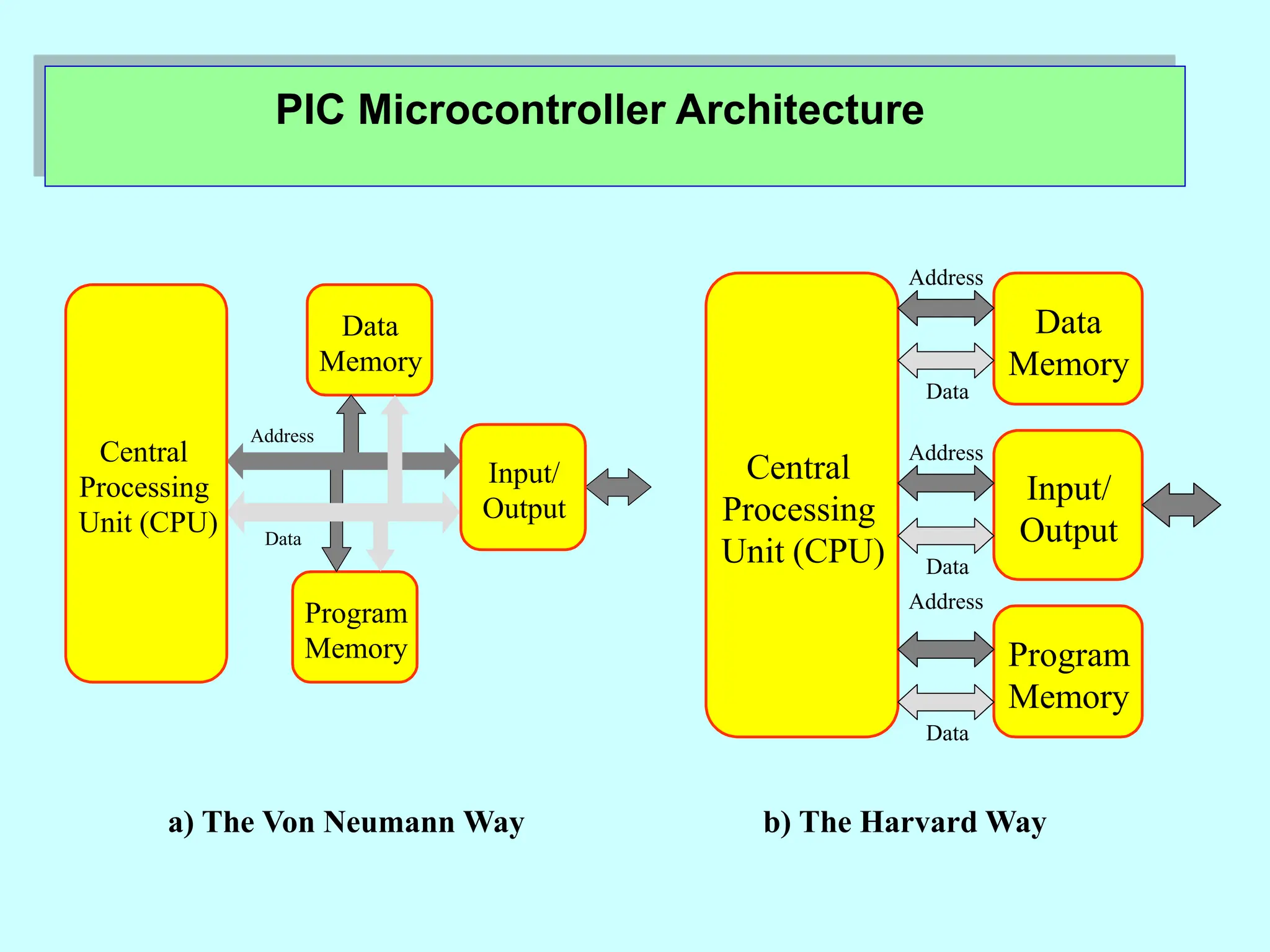
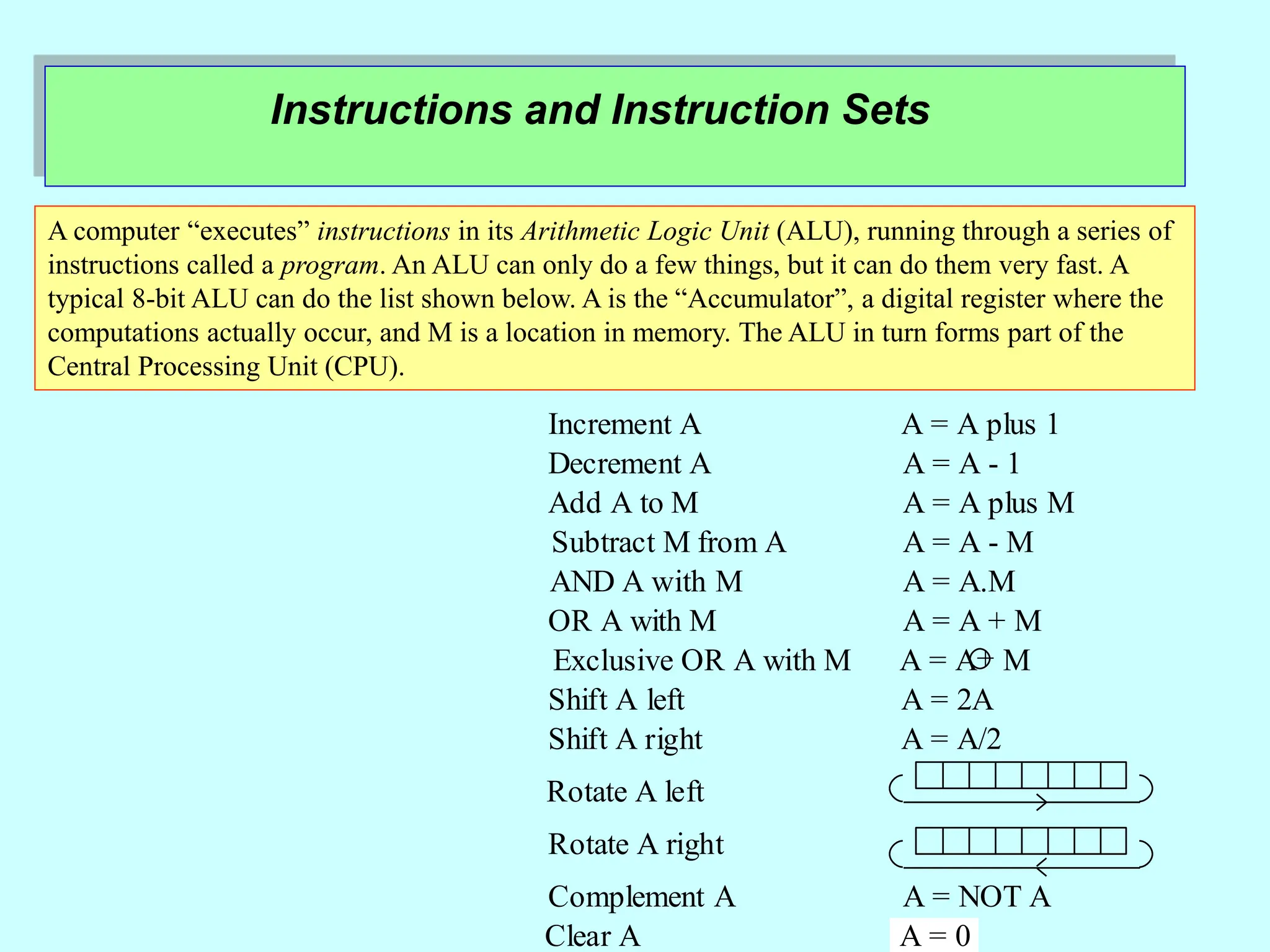
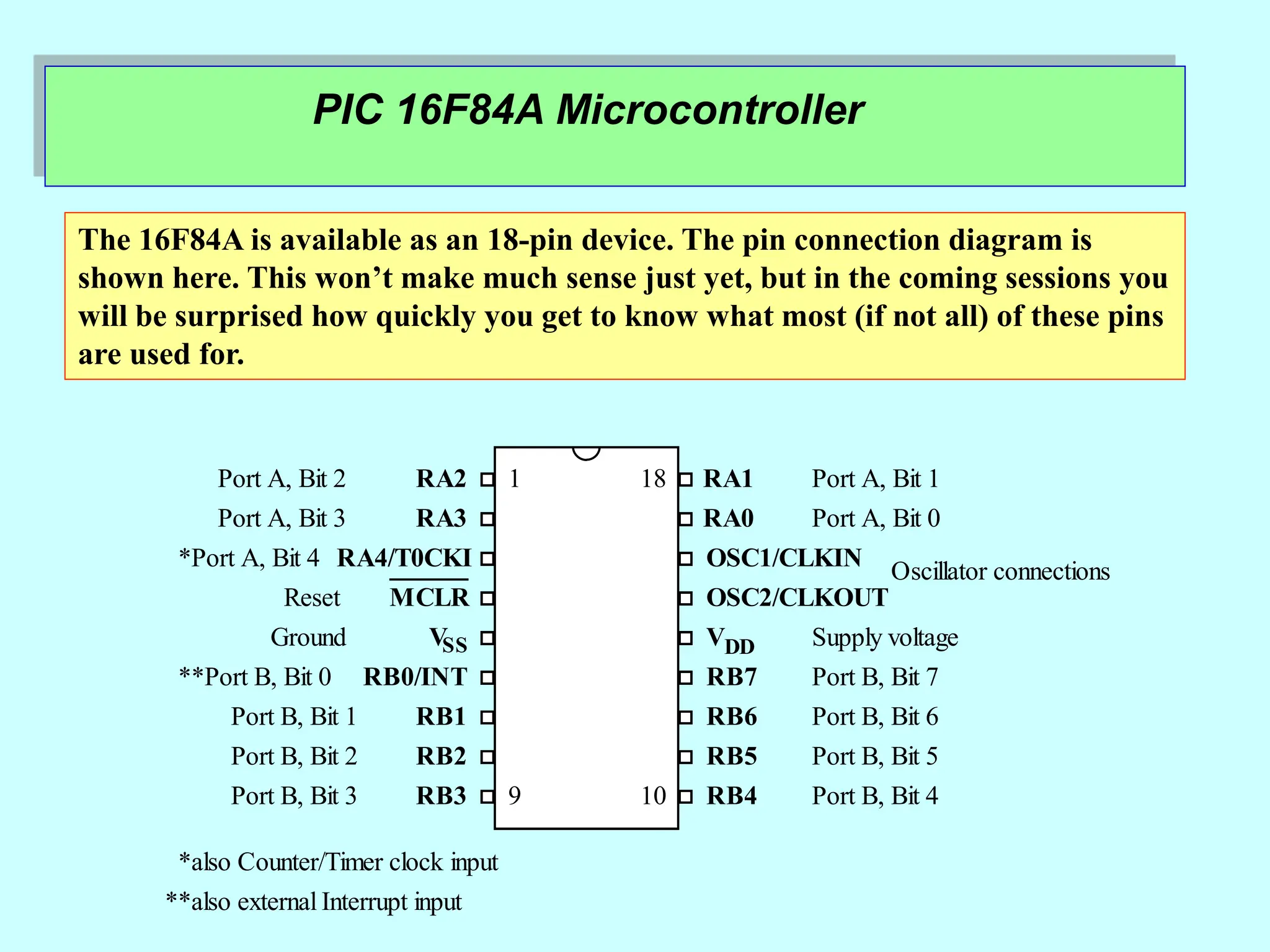
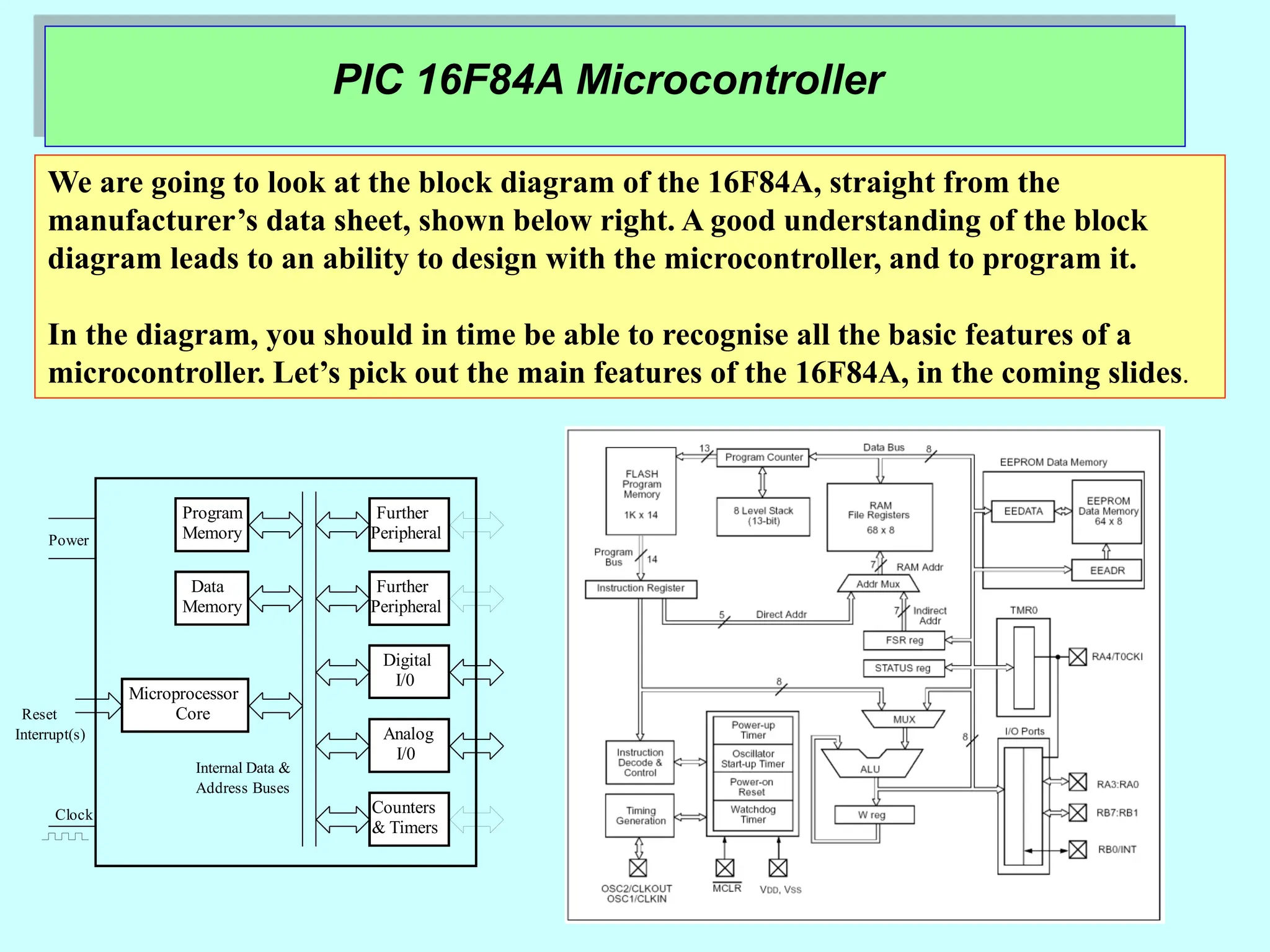
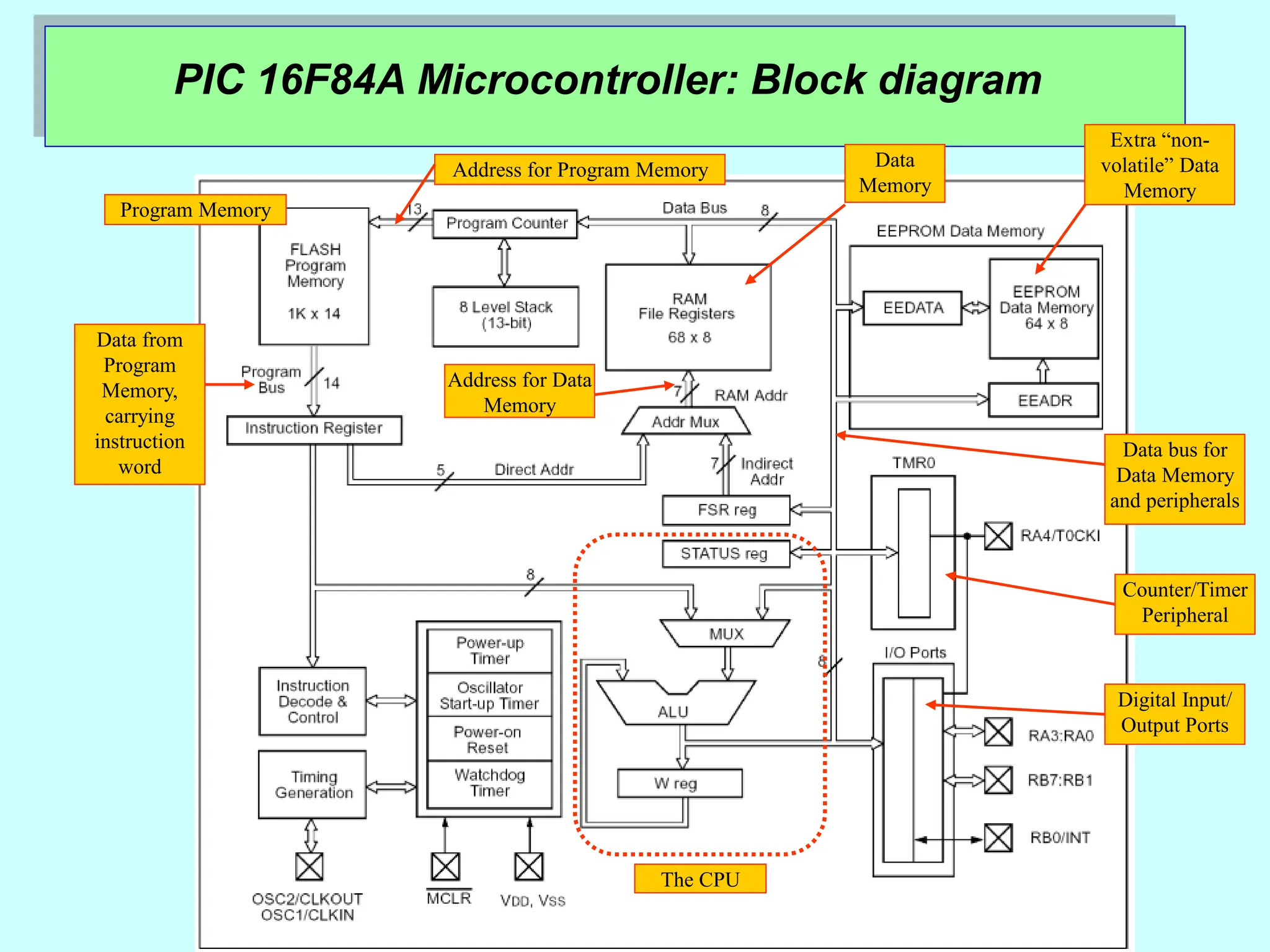
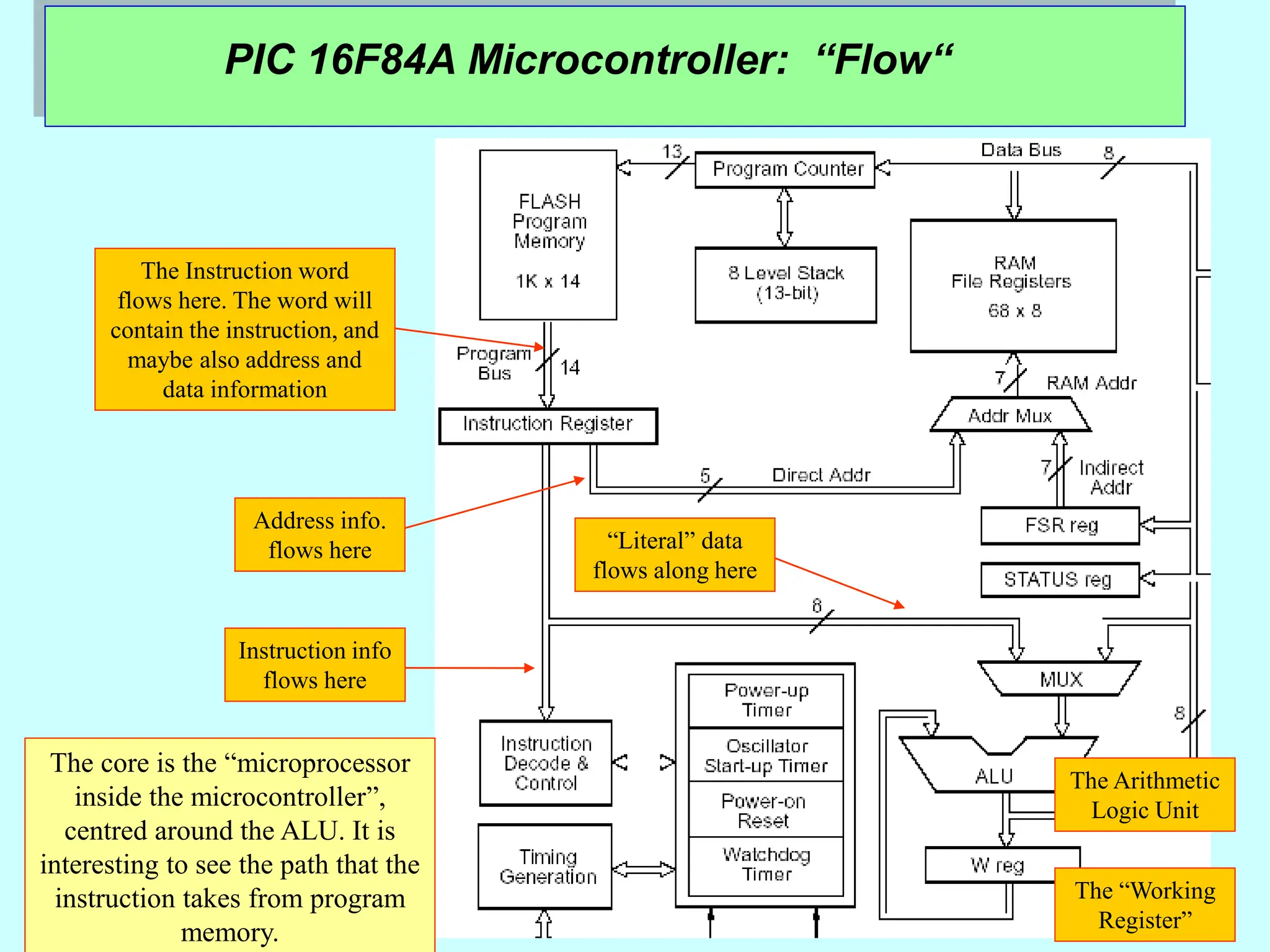
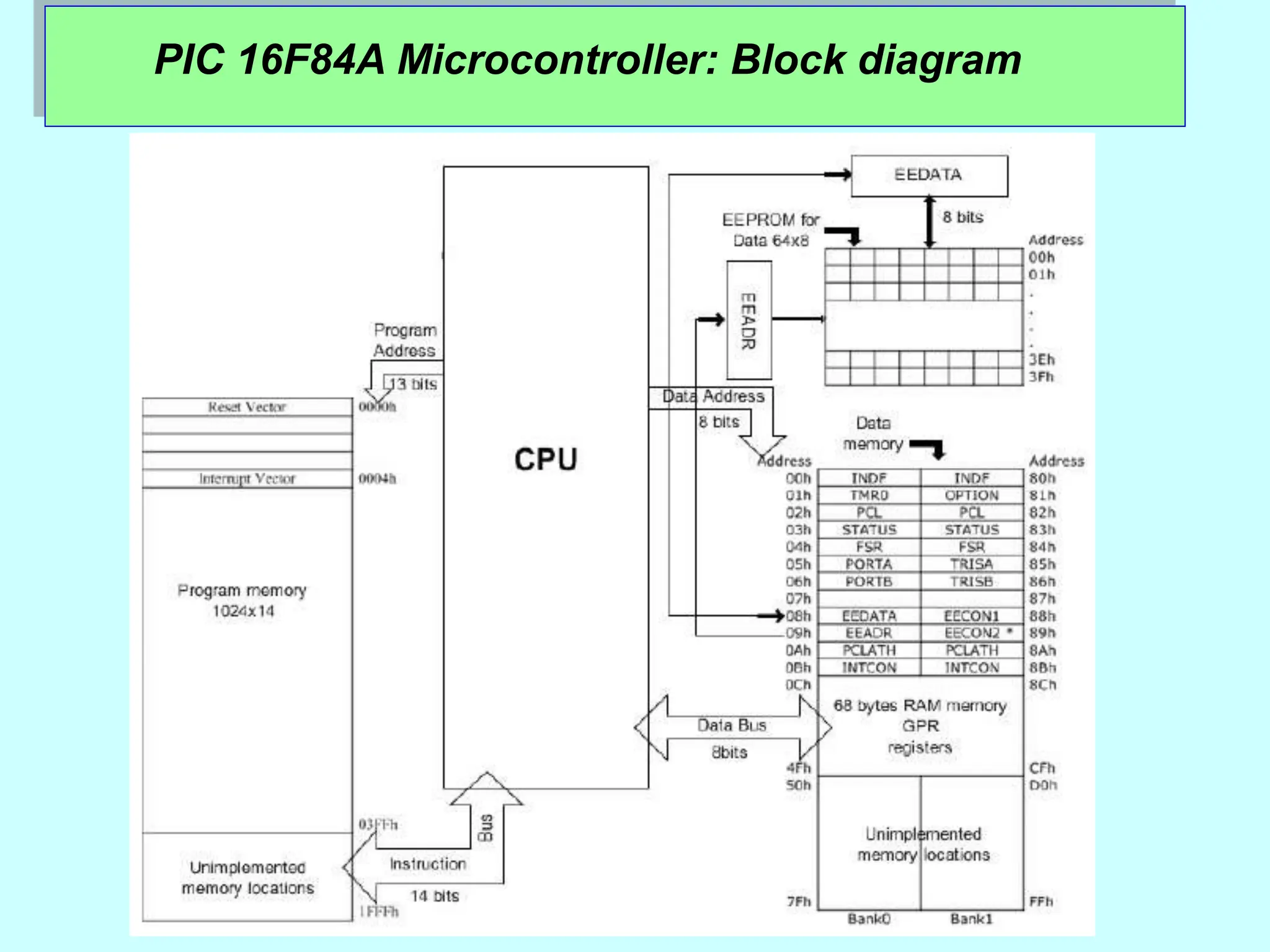
The document discusses microcontrollers and the PIC microcontroller architecture. It begins by defining a microcontroller and distinguishing it from a microprocessor. A microcontroller is designed to perform simple control functions and contains peripherals like I/O, timers, and analog components integrated onto a single chip. The rest of the document details the architecture of the PIC microcontroller, including its instruction set, programming, applications, and features of the popular PIC16F84A model.





![Digital Signal Processing[ECEG-3171]-Ch1_L07](https://cdn.slidesharecdn.com/ss_thumbnails/dspl7ch3-180427094425-thumbnail.jpg?width=600ounds&width=560&fit=bounds)






































































