Downloaded 98 times

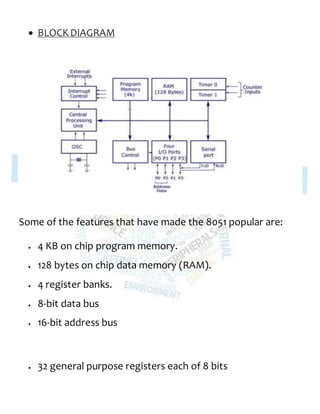



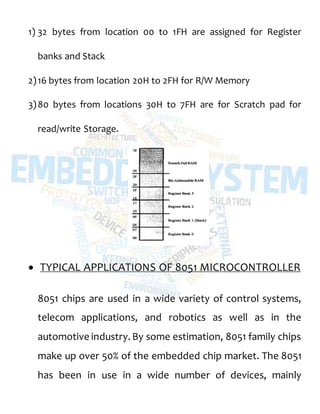








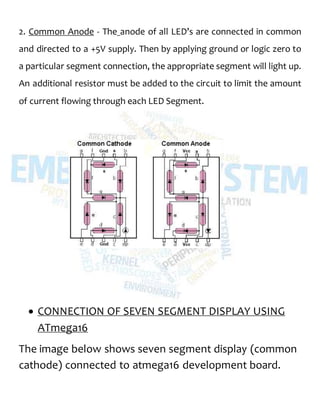
















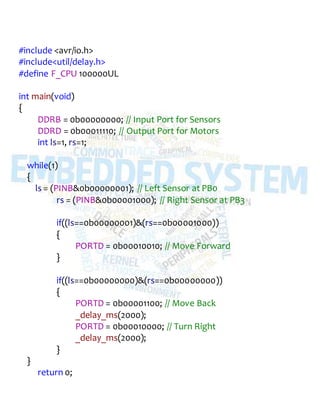



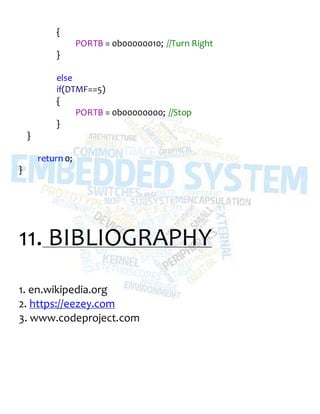

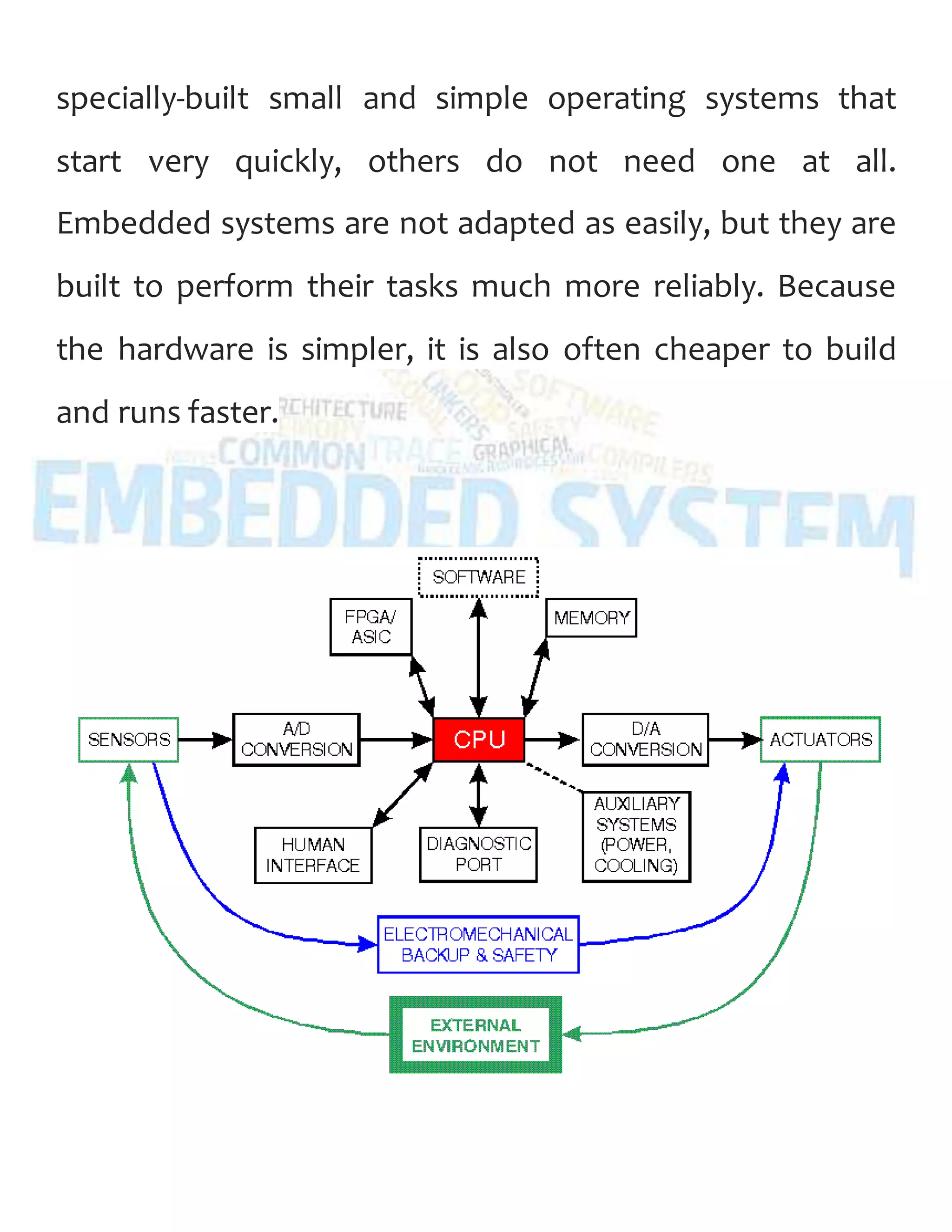














The document is a project report on 'Advanced Embedded Systems' detailing a summer training course undertaken by Suhani Singh. It provides an overview of embedded systems, including their definitions, examples, components like microcontrollers and microprocessors, as well as specific architectures such as the 8051 and Atmel AVR. The report also discusses practical applications and includes sample code for interfacing components like LEDs.
















































































