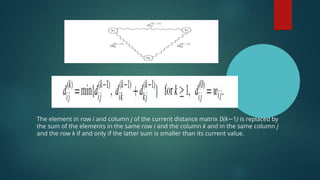
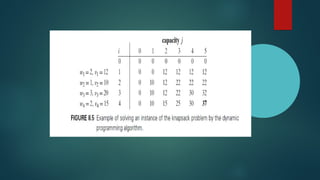
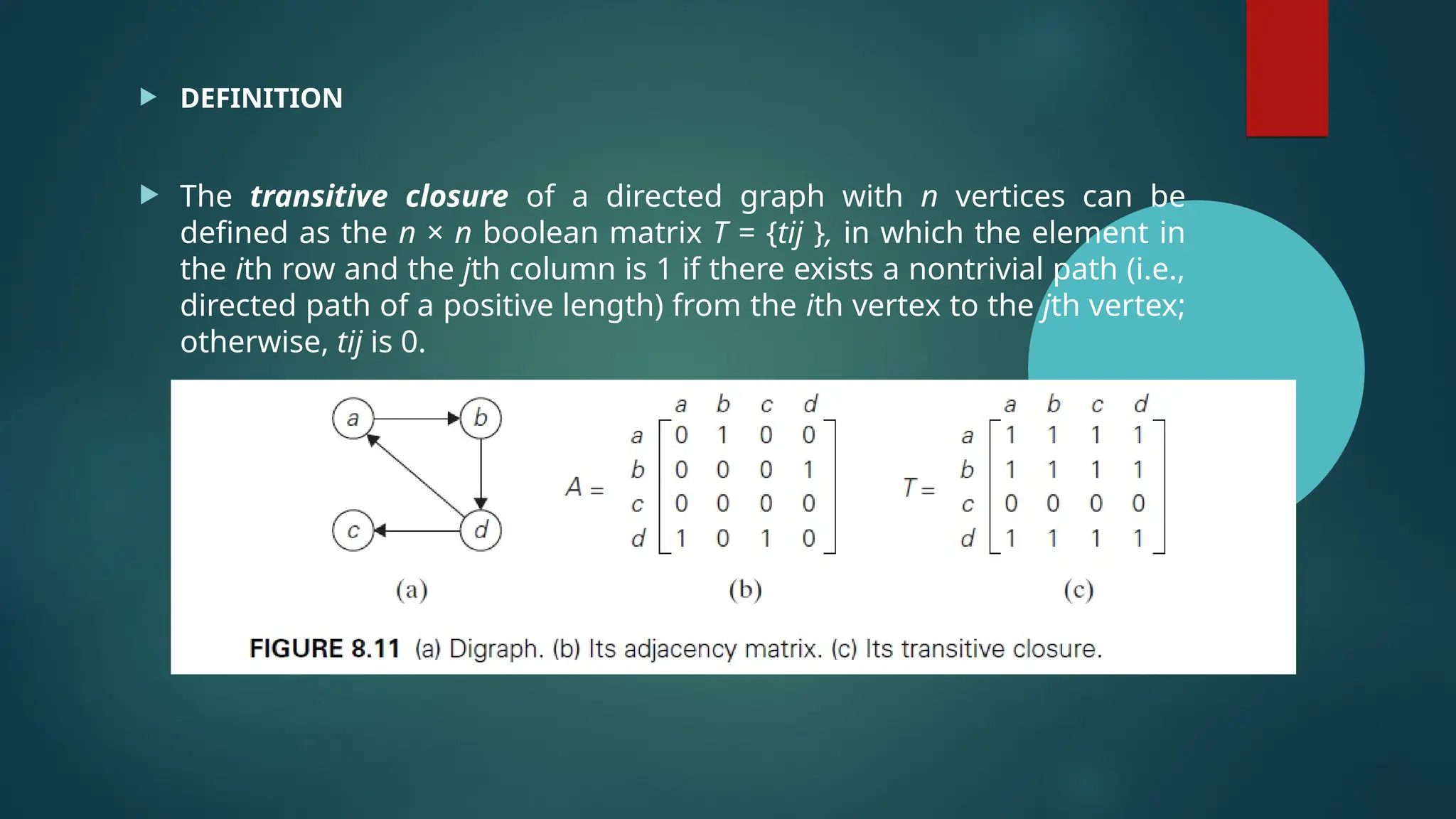
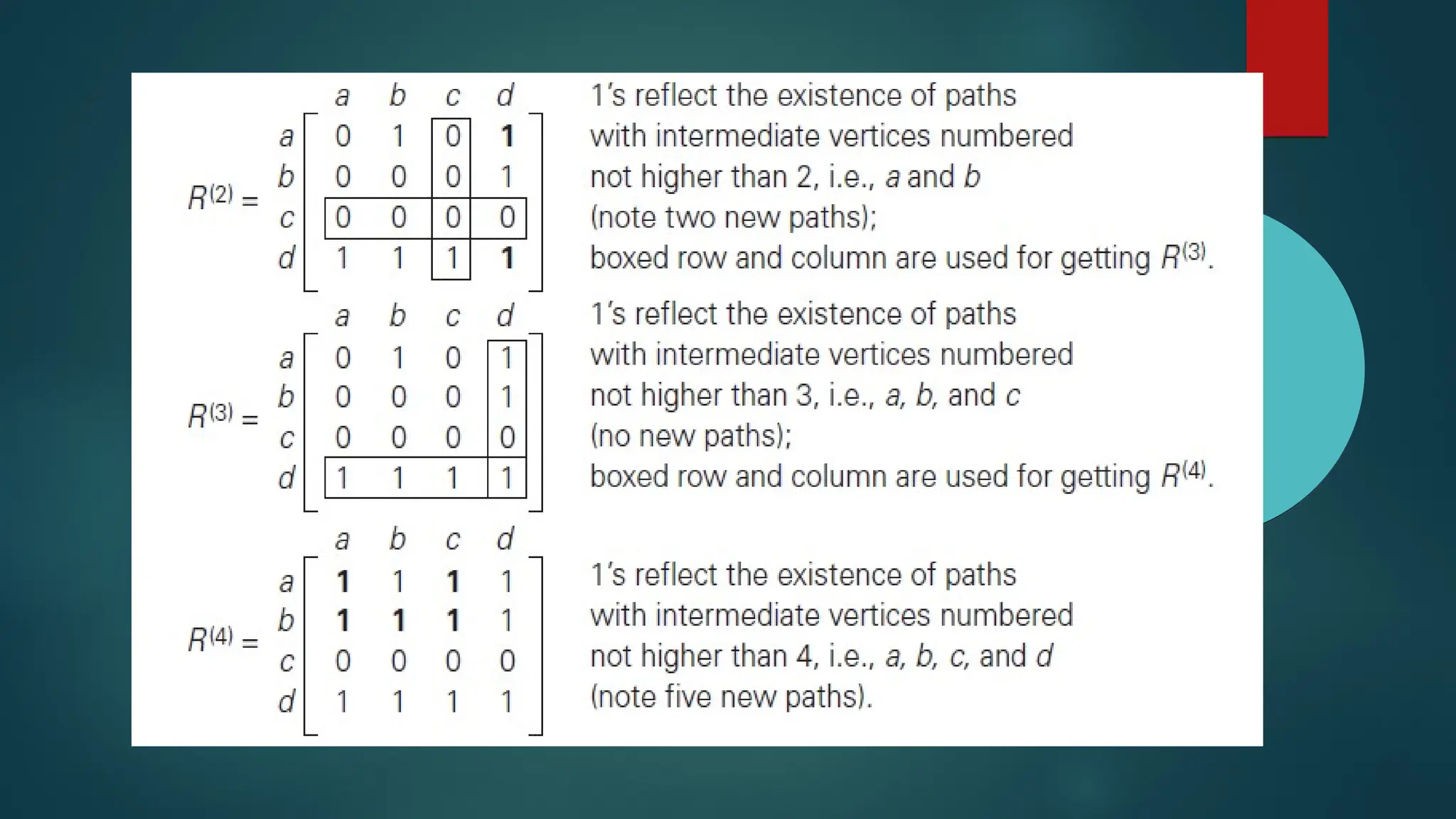
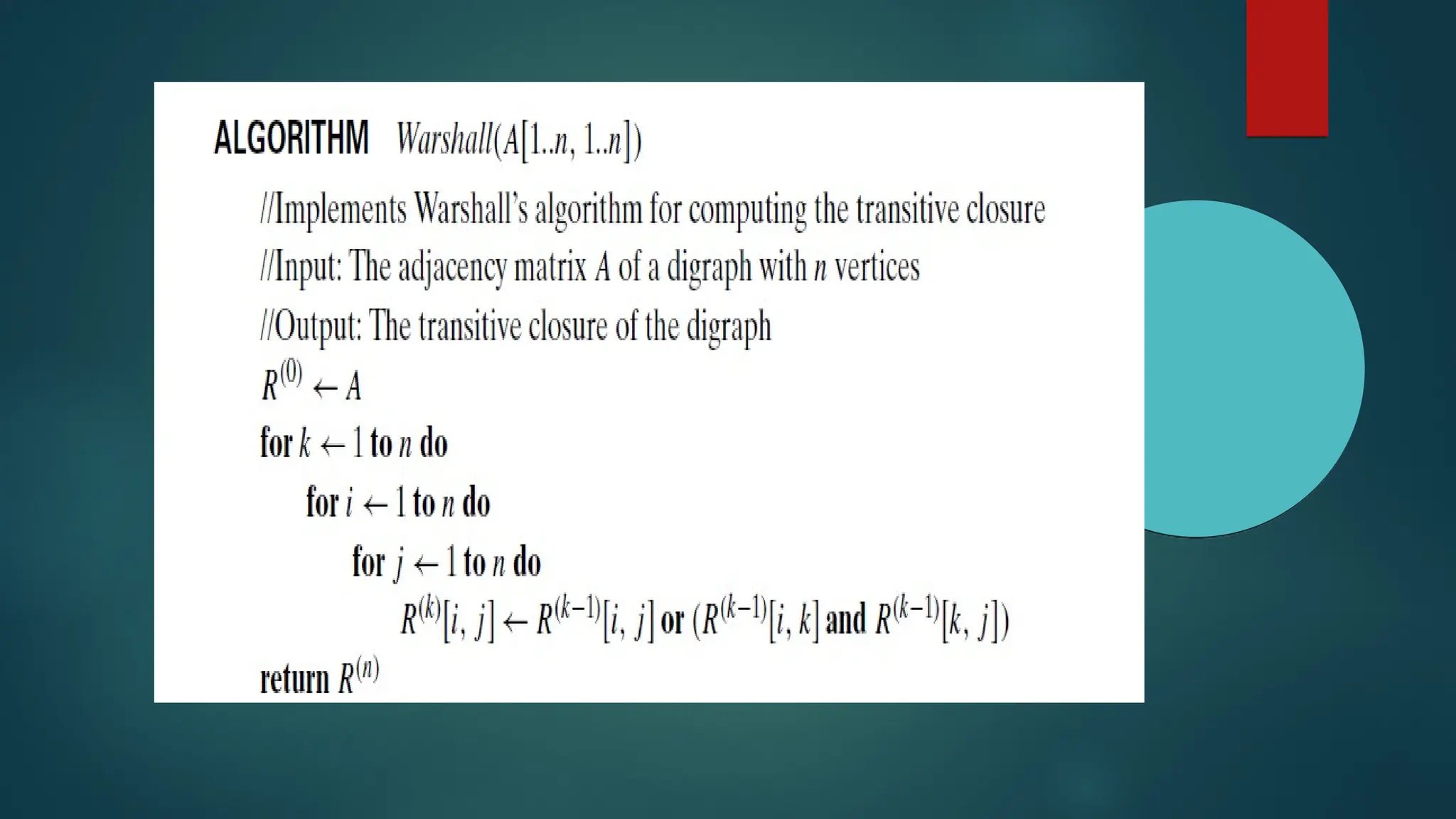
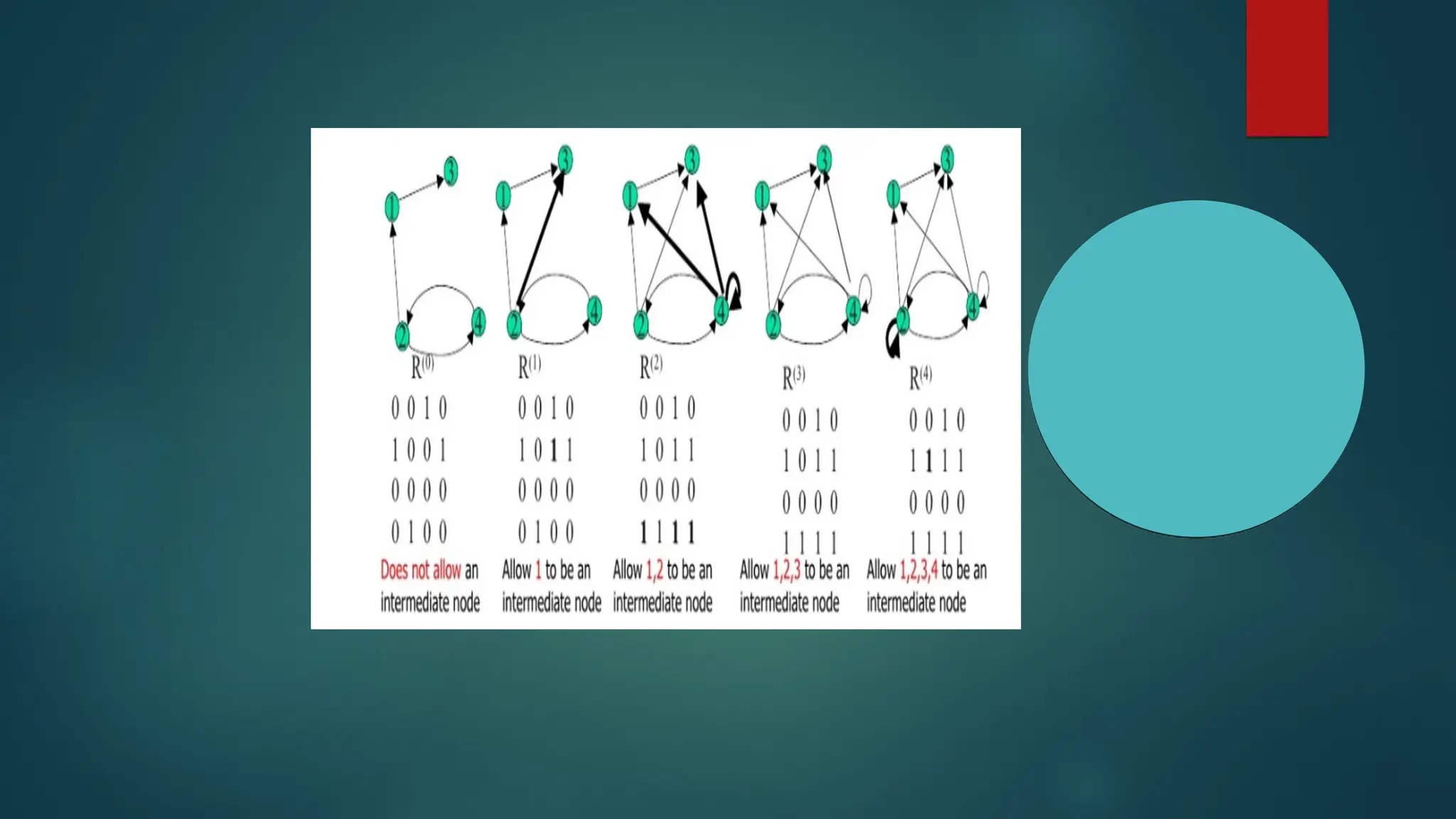
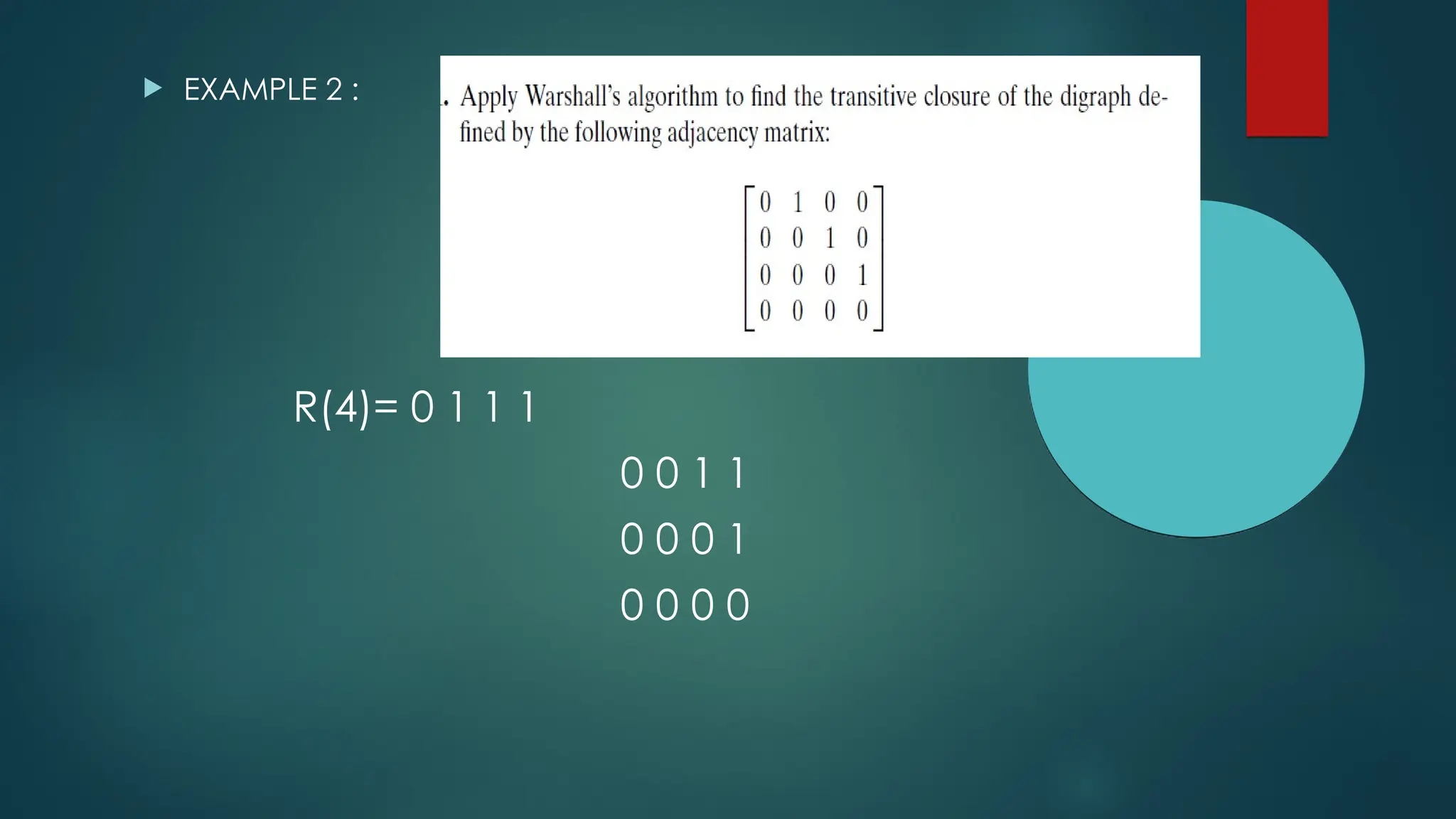
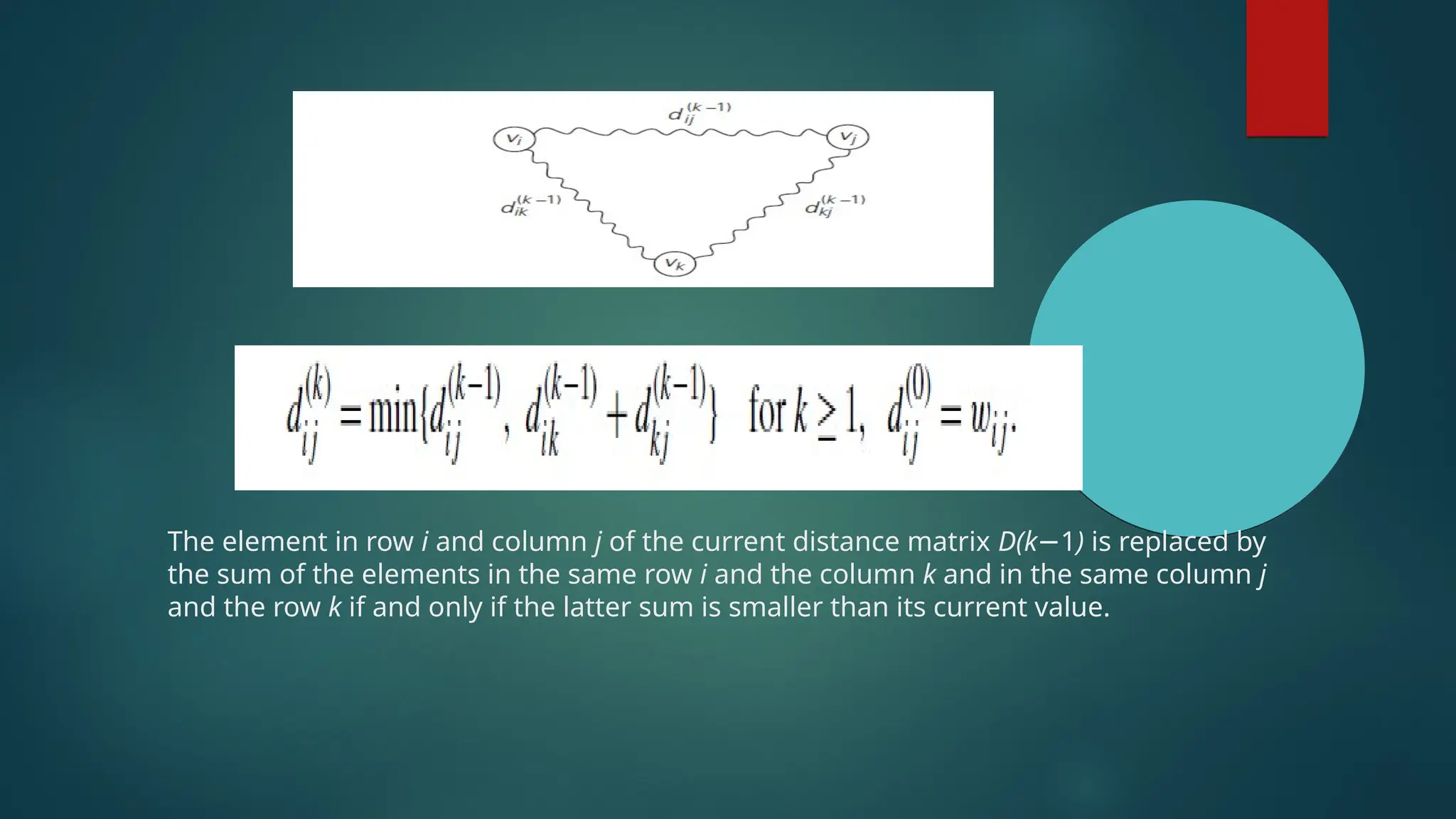
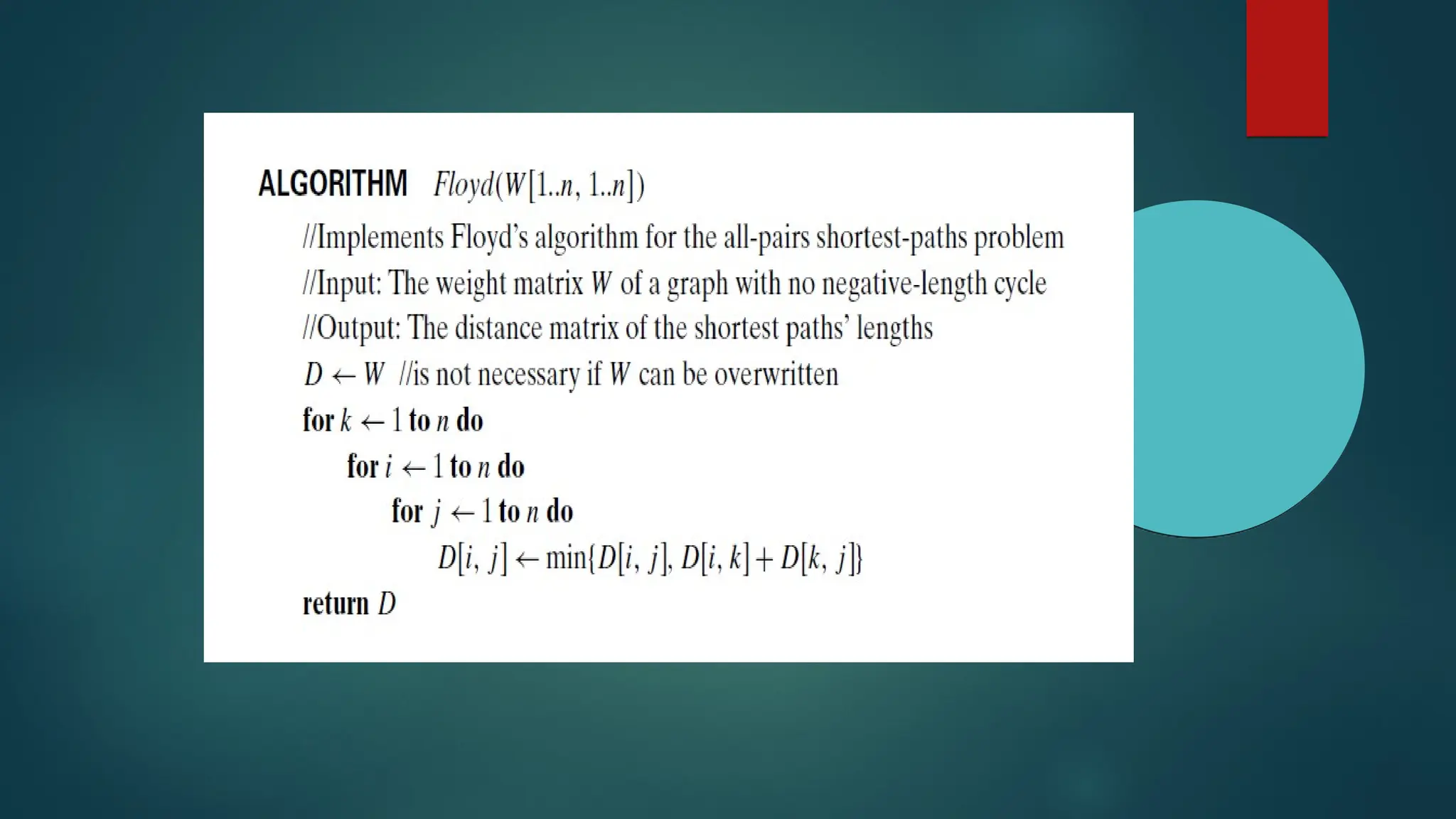
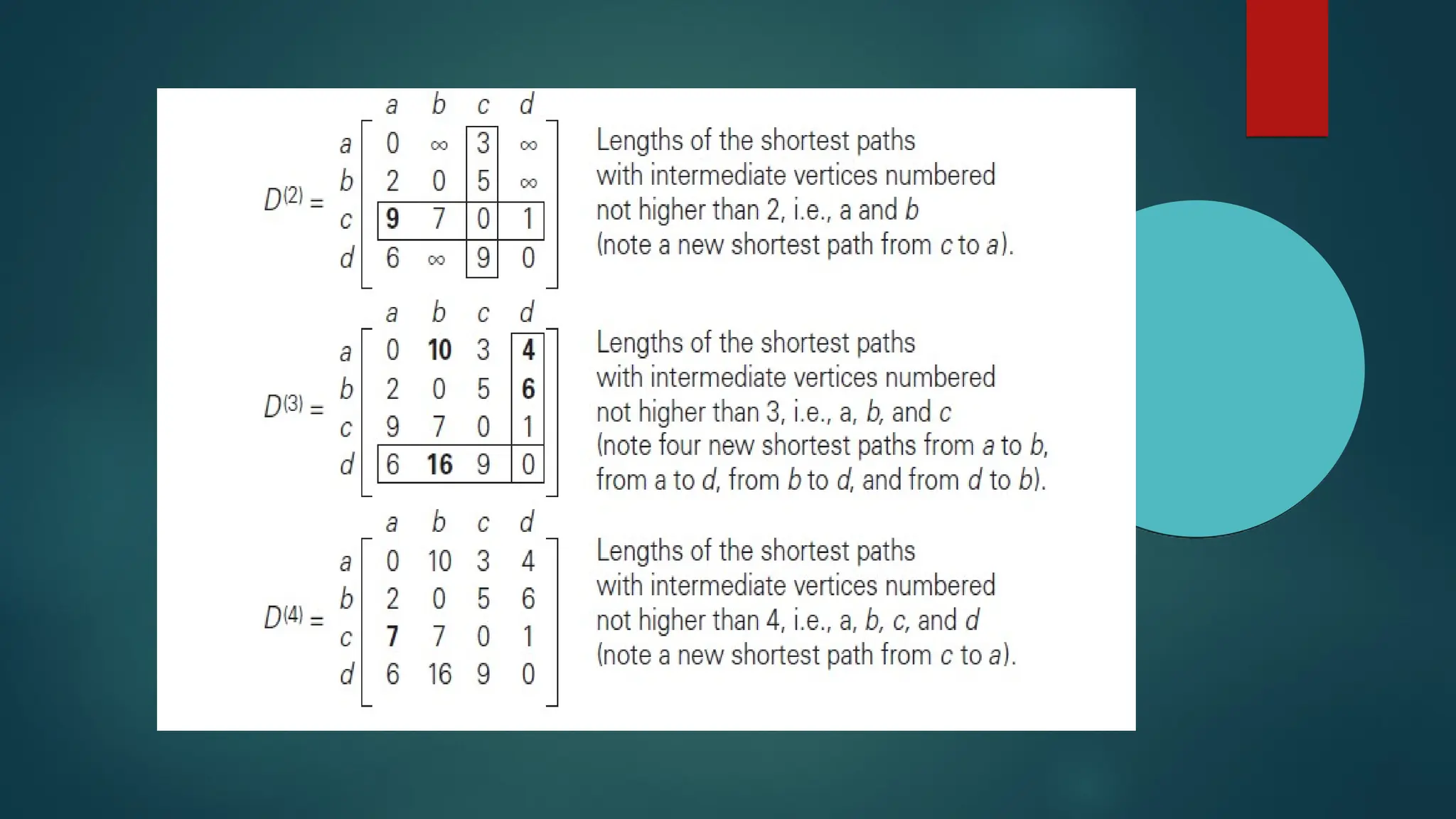
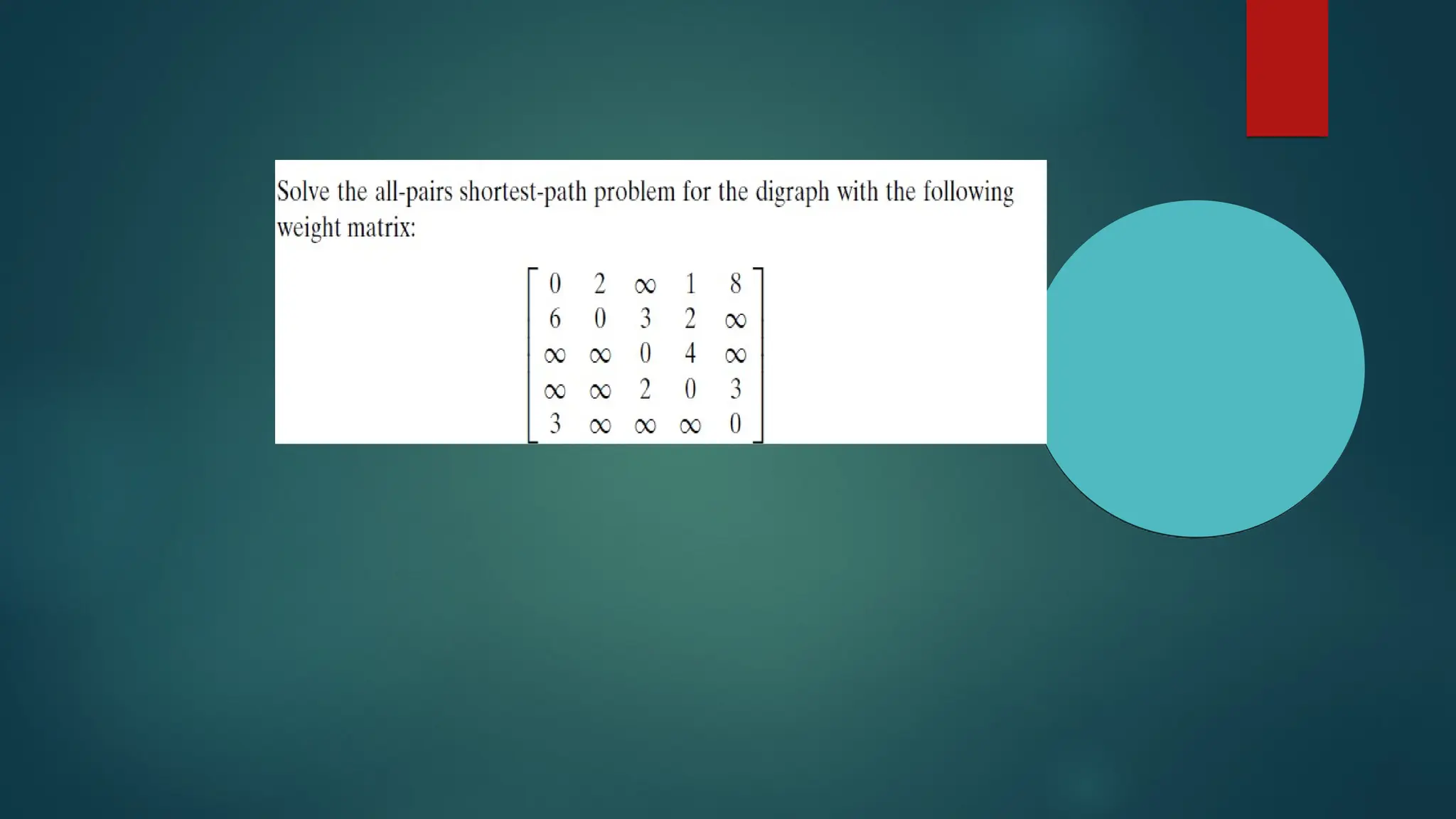
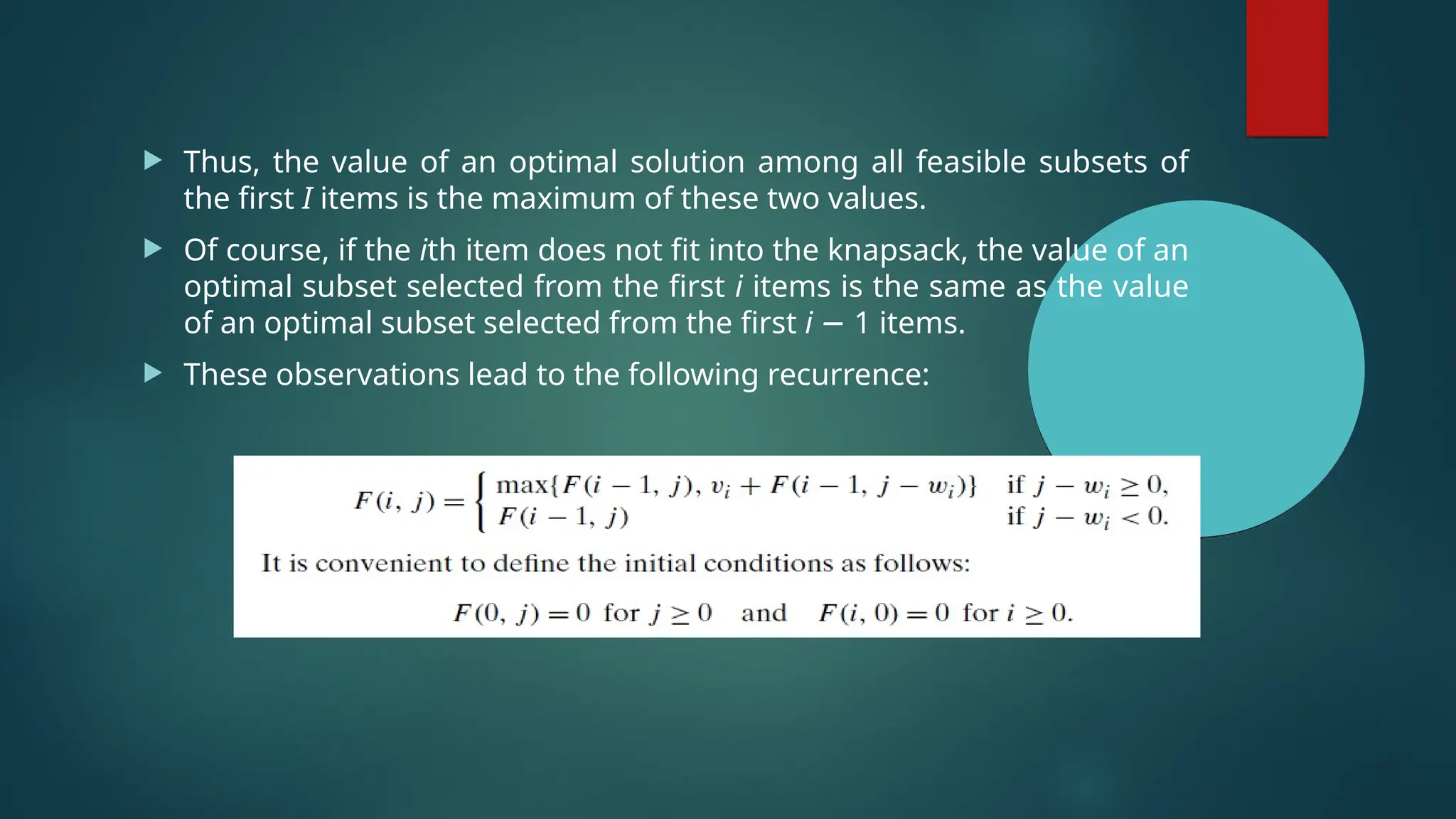
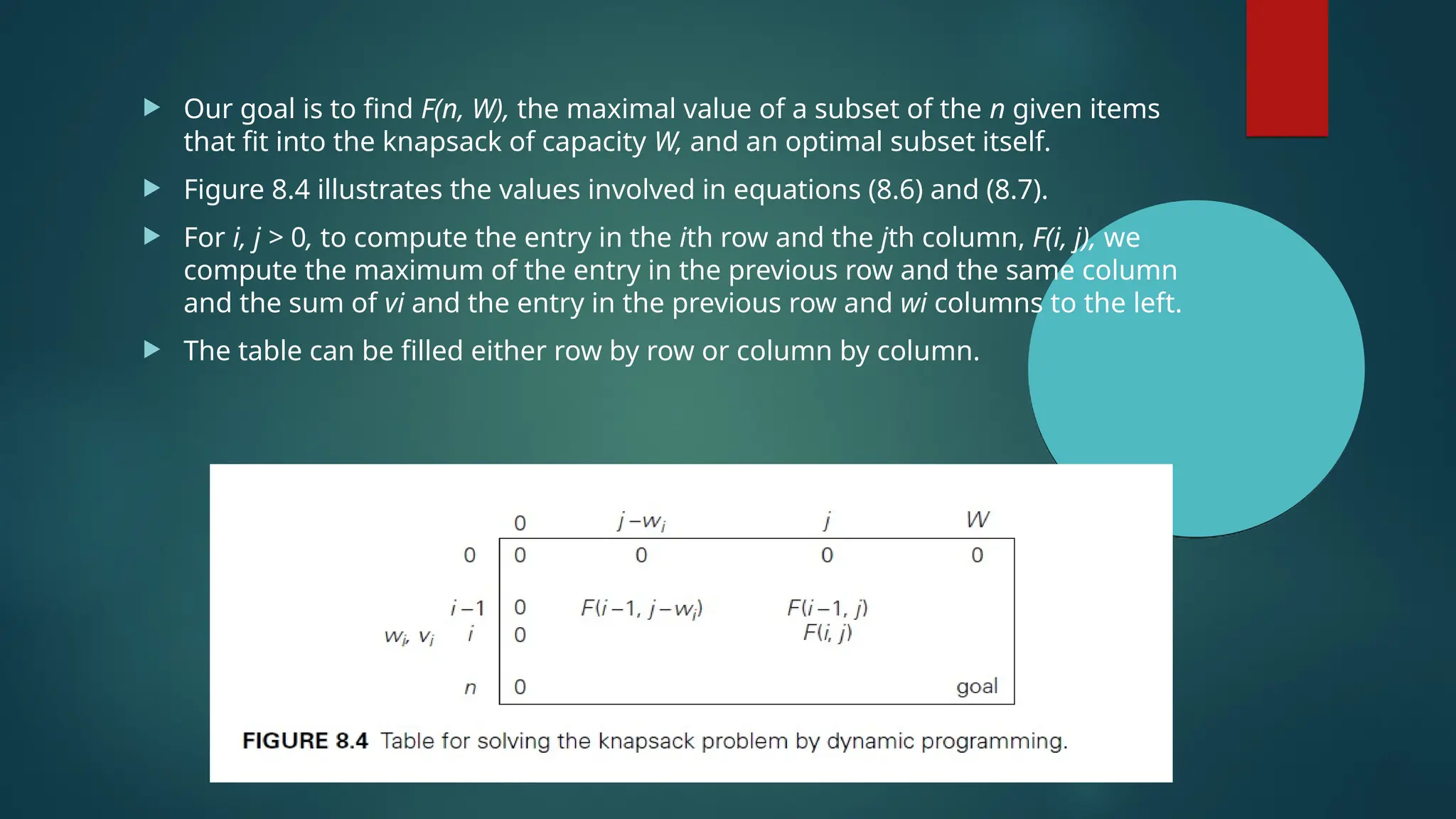
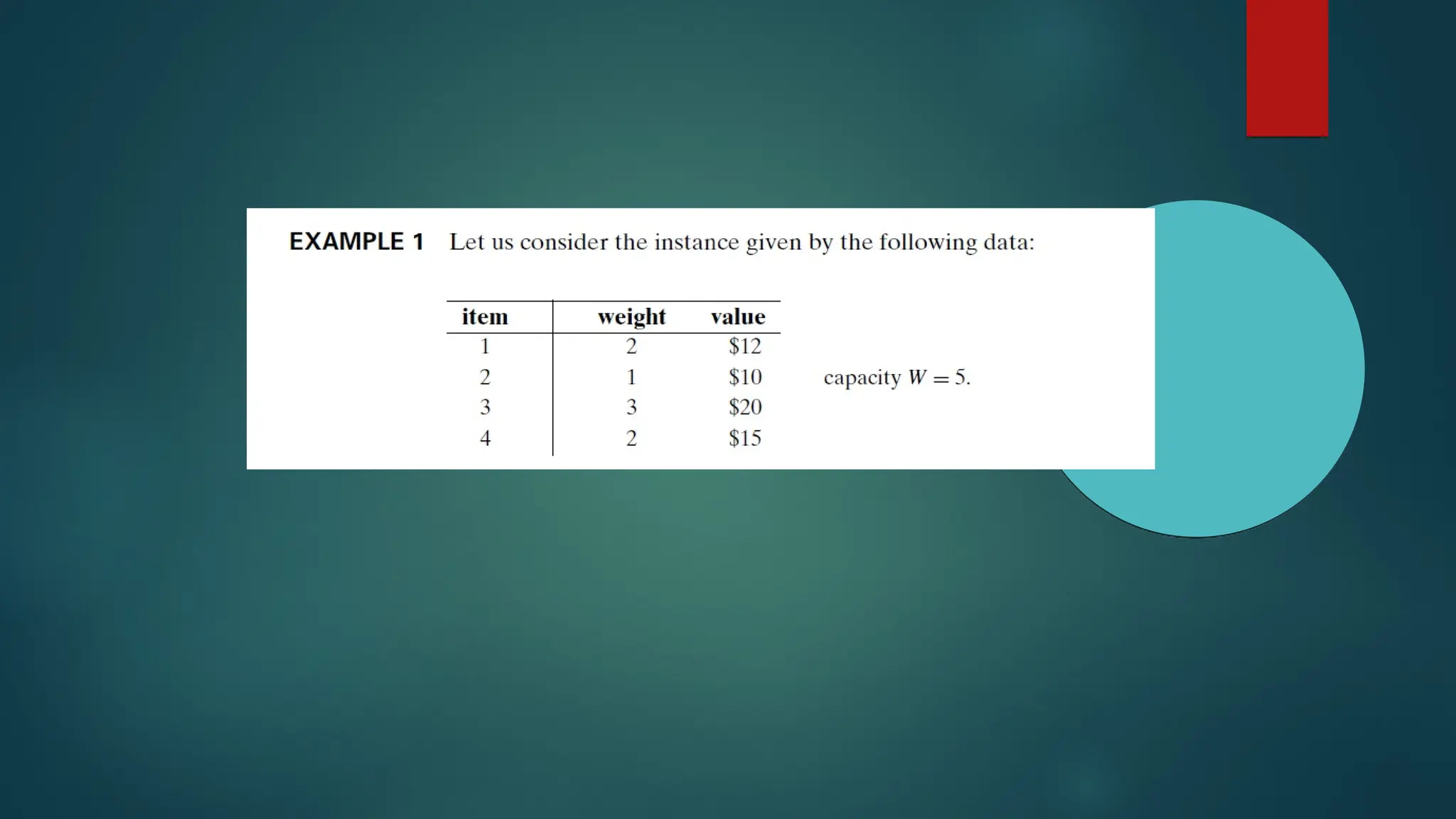
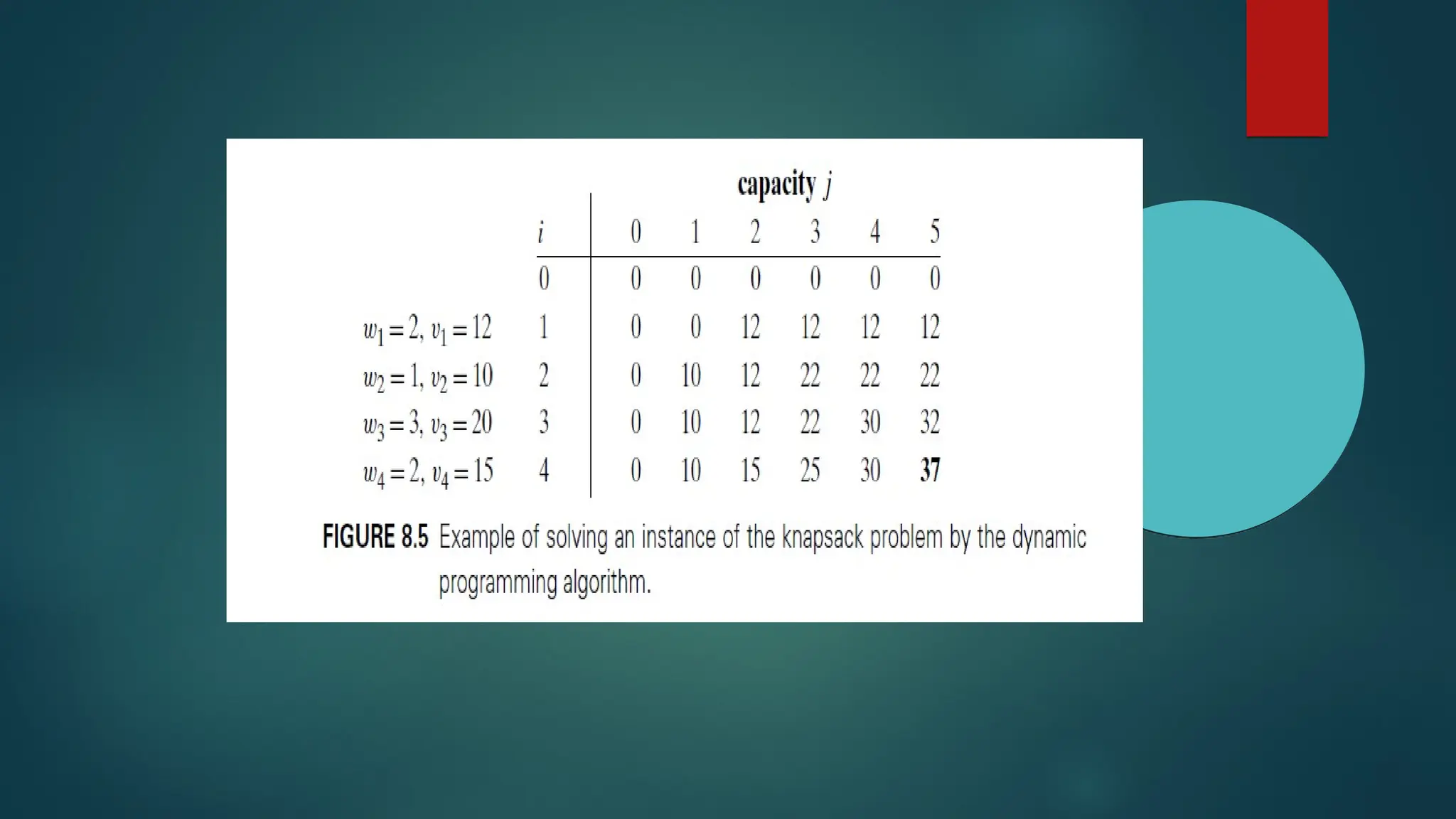
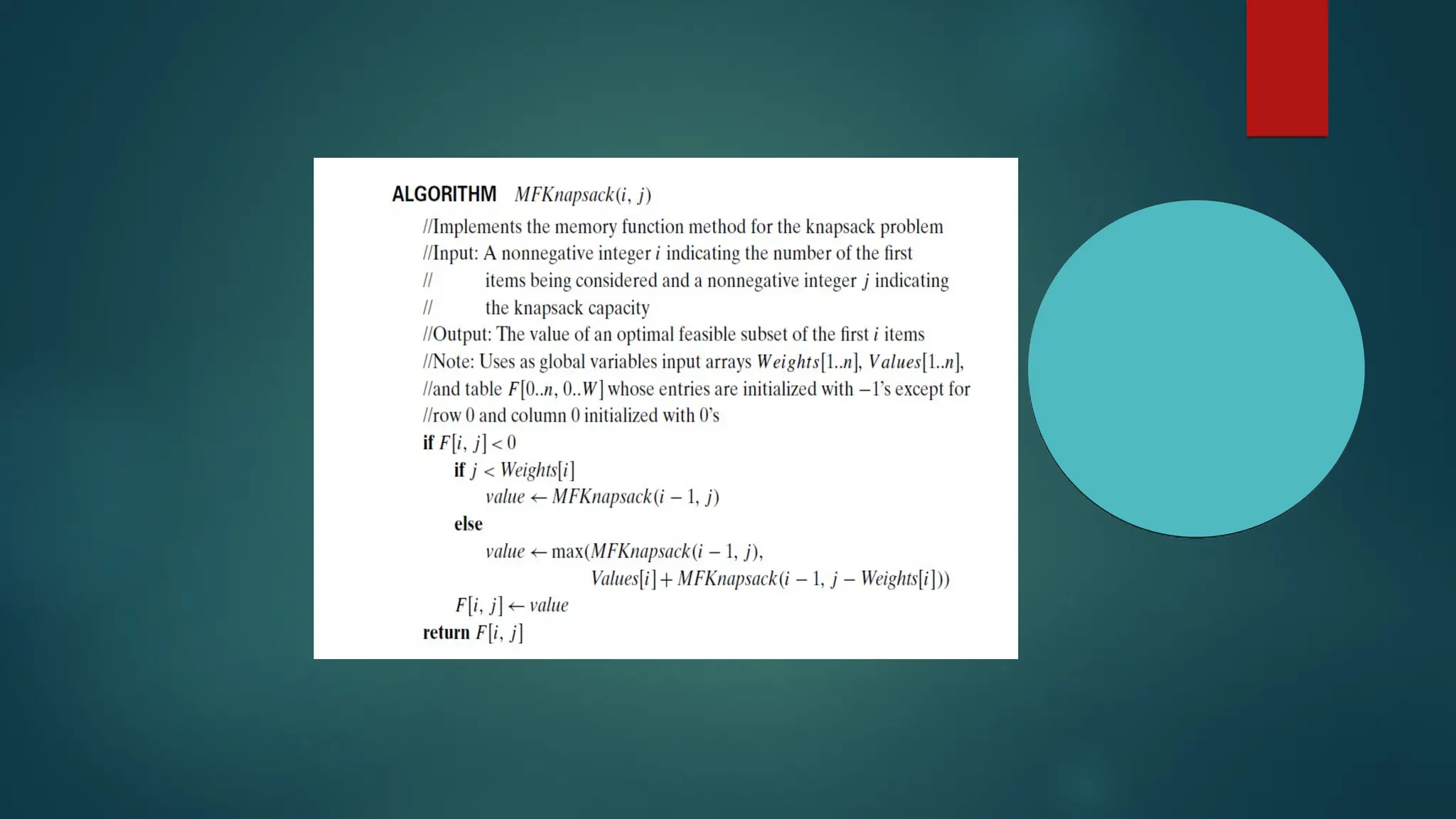
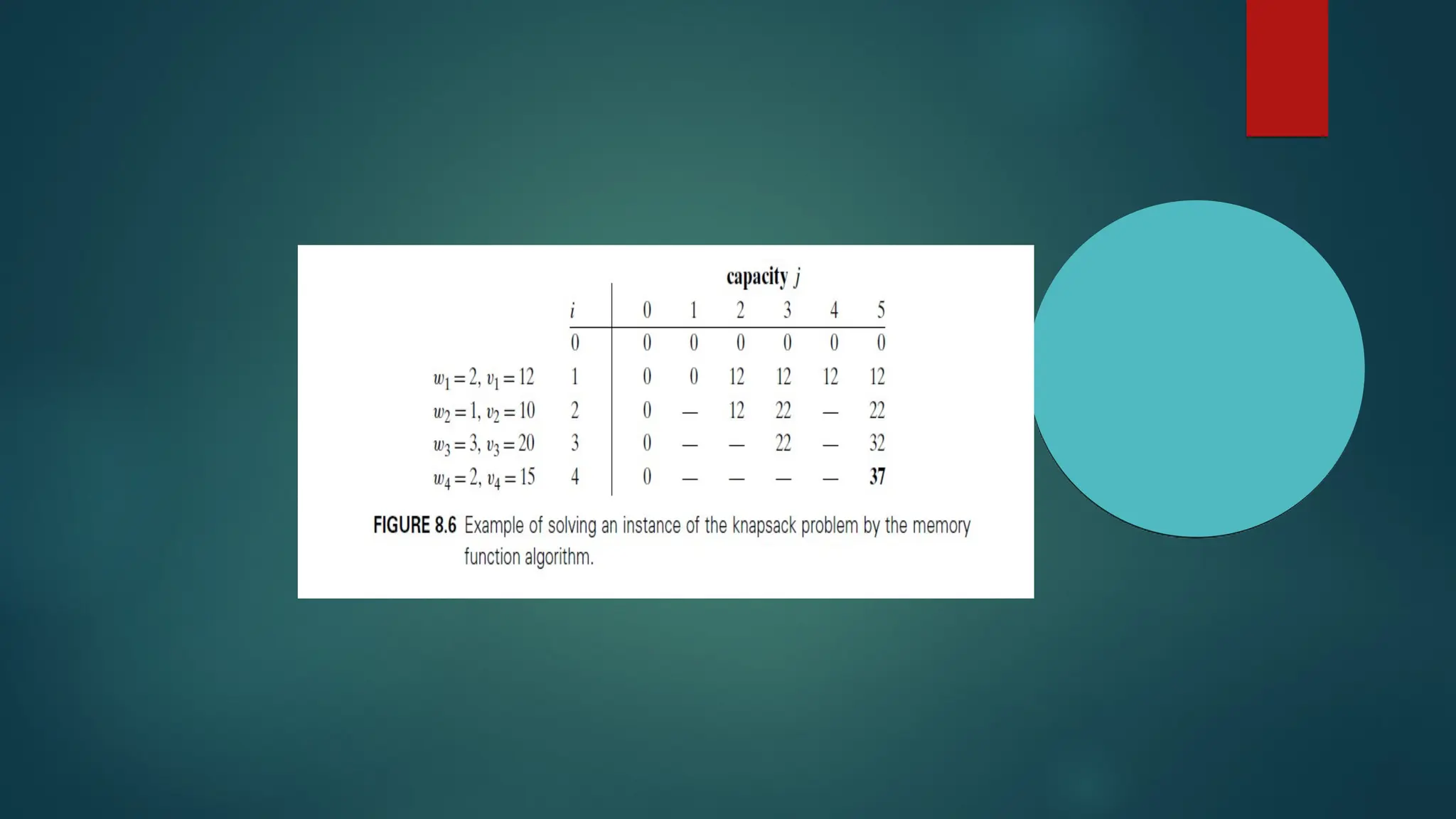
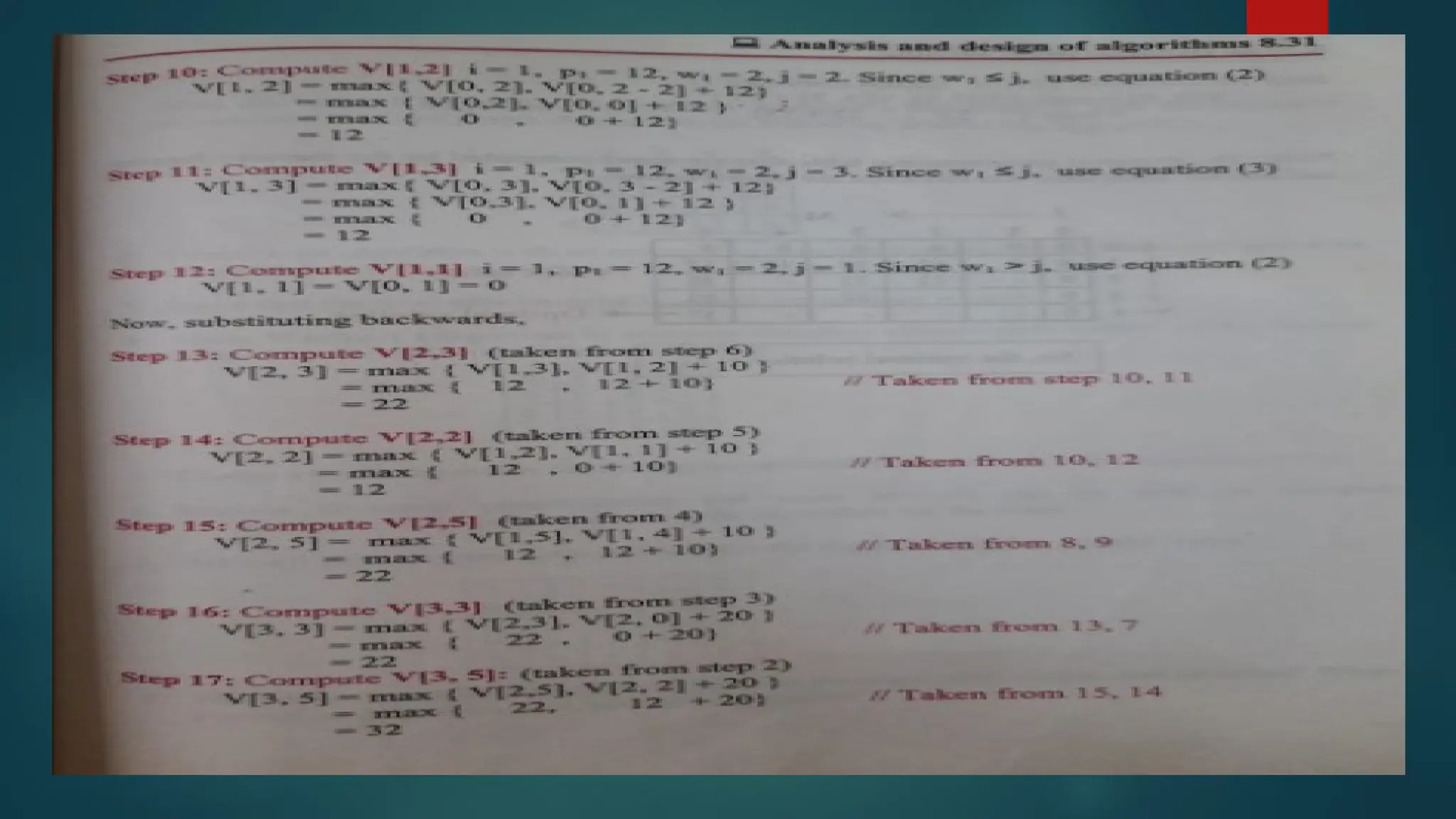
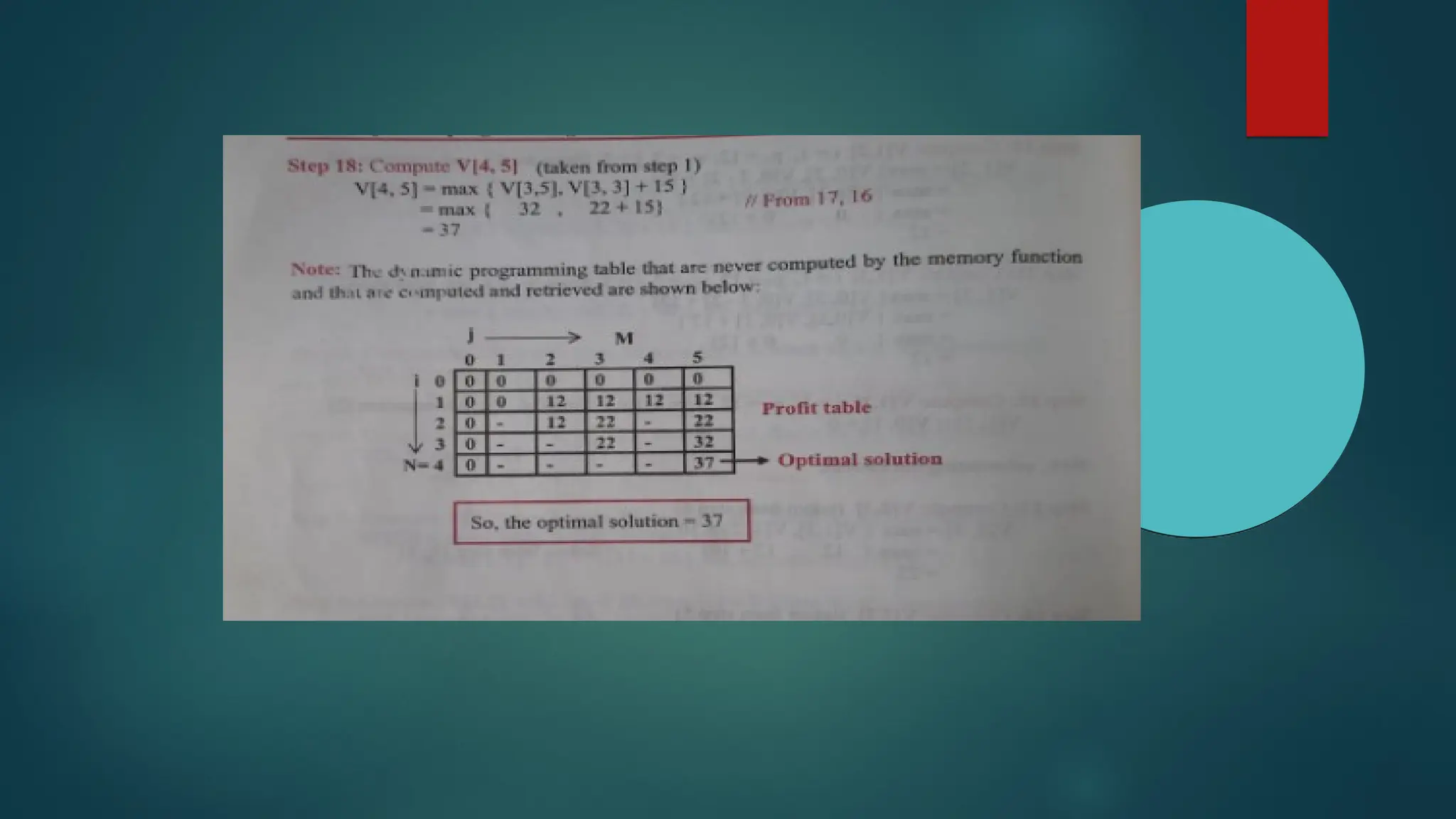
The document outlines dynamic programming techniques, focusing on Warshall's algorithm for transitive closure in directed graphs and Floyd's algorithm for finding all-pairs shortest paths in weighted graphs. It explains these algorithms' basis on exploiting relationships between complex problems and simpler versions, emphasizing the construction of boolean and distance matrices. Additionally, it discusses the knapsack problem, presenting a recurrence relation for determining the optimal subset of items to maximize value within weight constraints.