Download to read offline
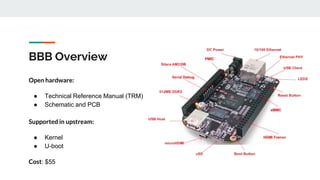



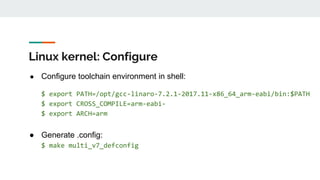

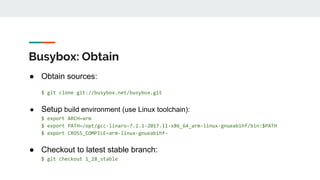
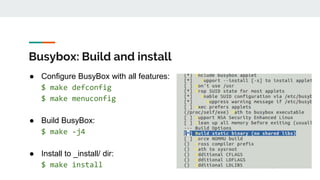

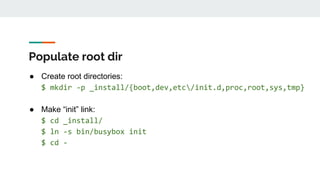

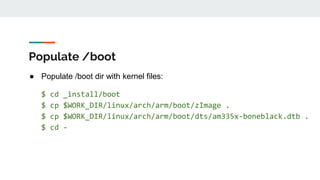
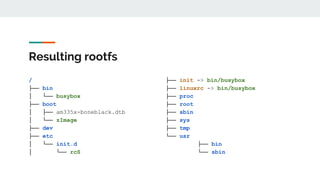
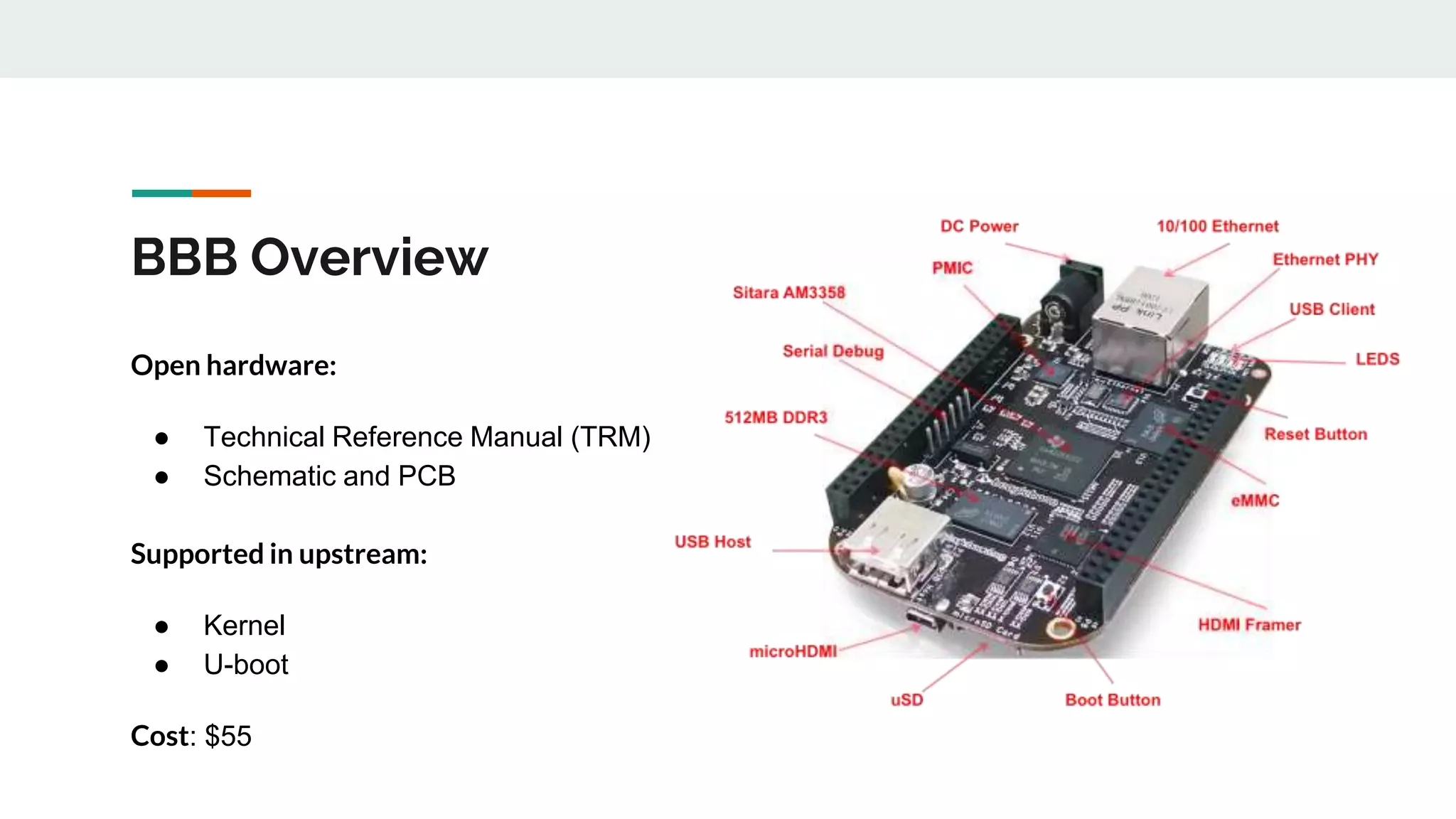




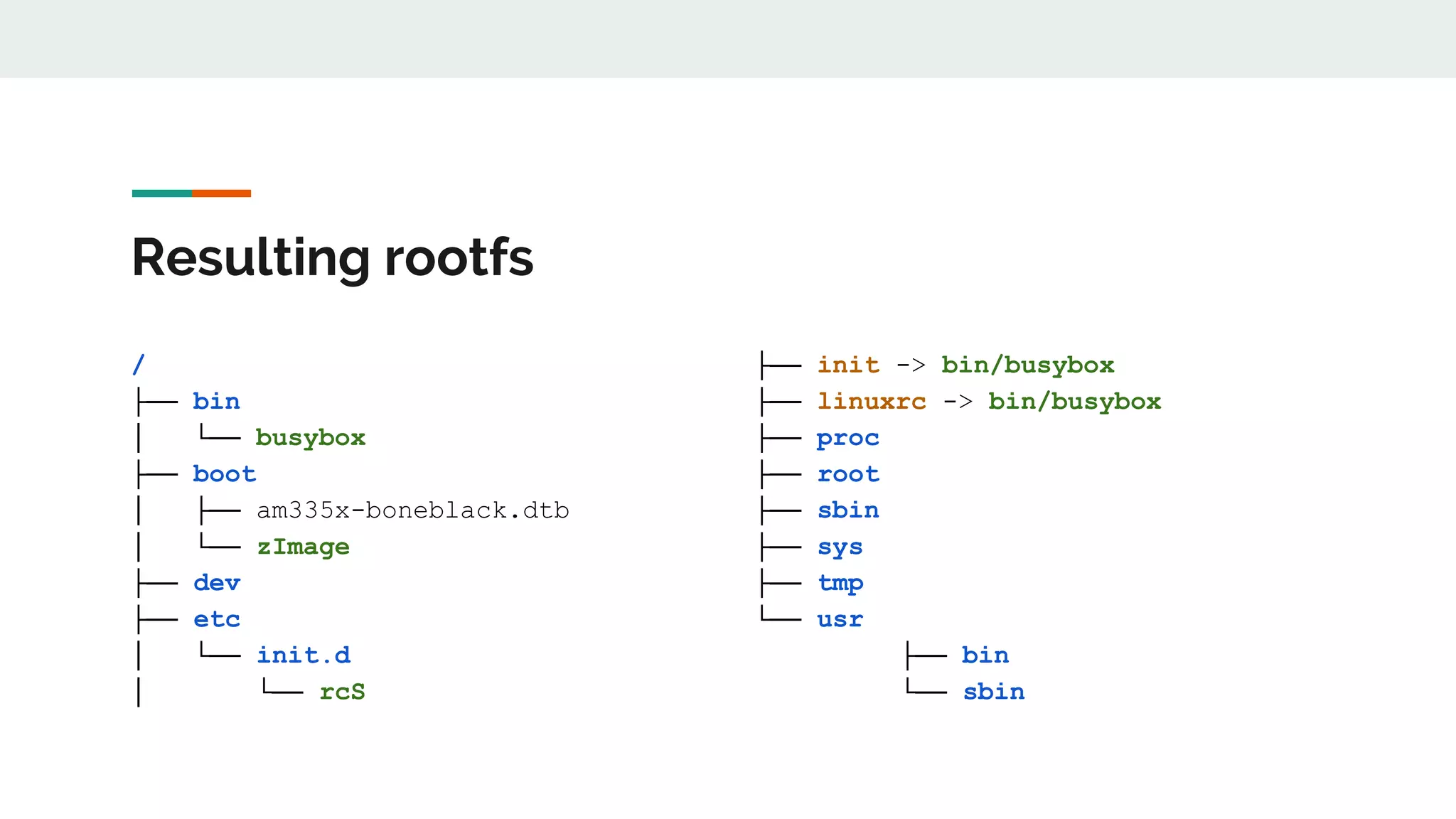

The document details the process for setting up and using the BeagleBone Black with upstream software, covering essential components like U-Boot, the Linux kernel, and BusyBox. It provides specific instructions for downloading toolchains, building software, and creating a root filesystem. Best practices and commands are included to guide users through the setup process.























































































