
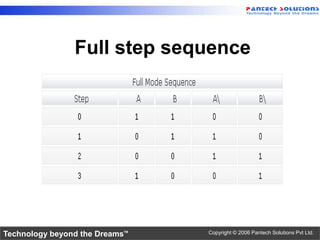
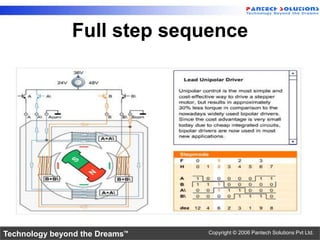
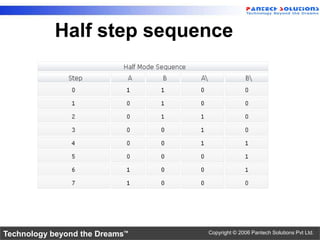
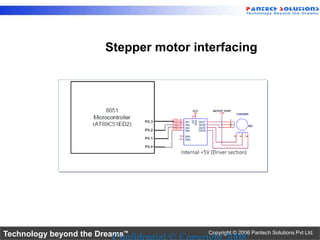
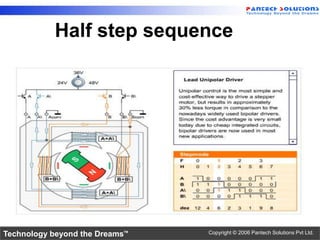
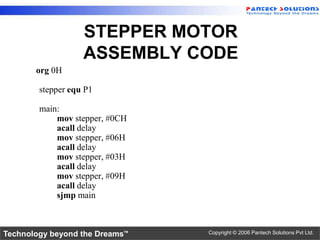
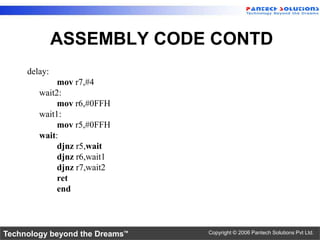
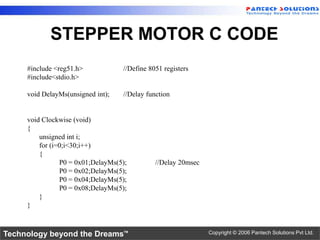
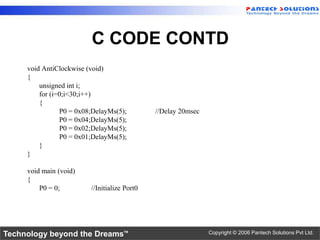
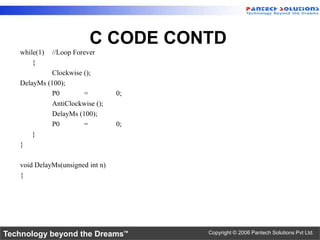


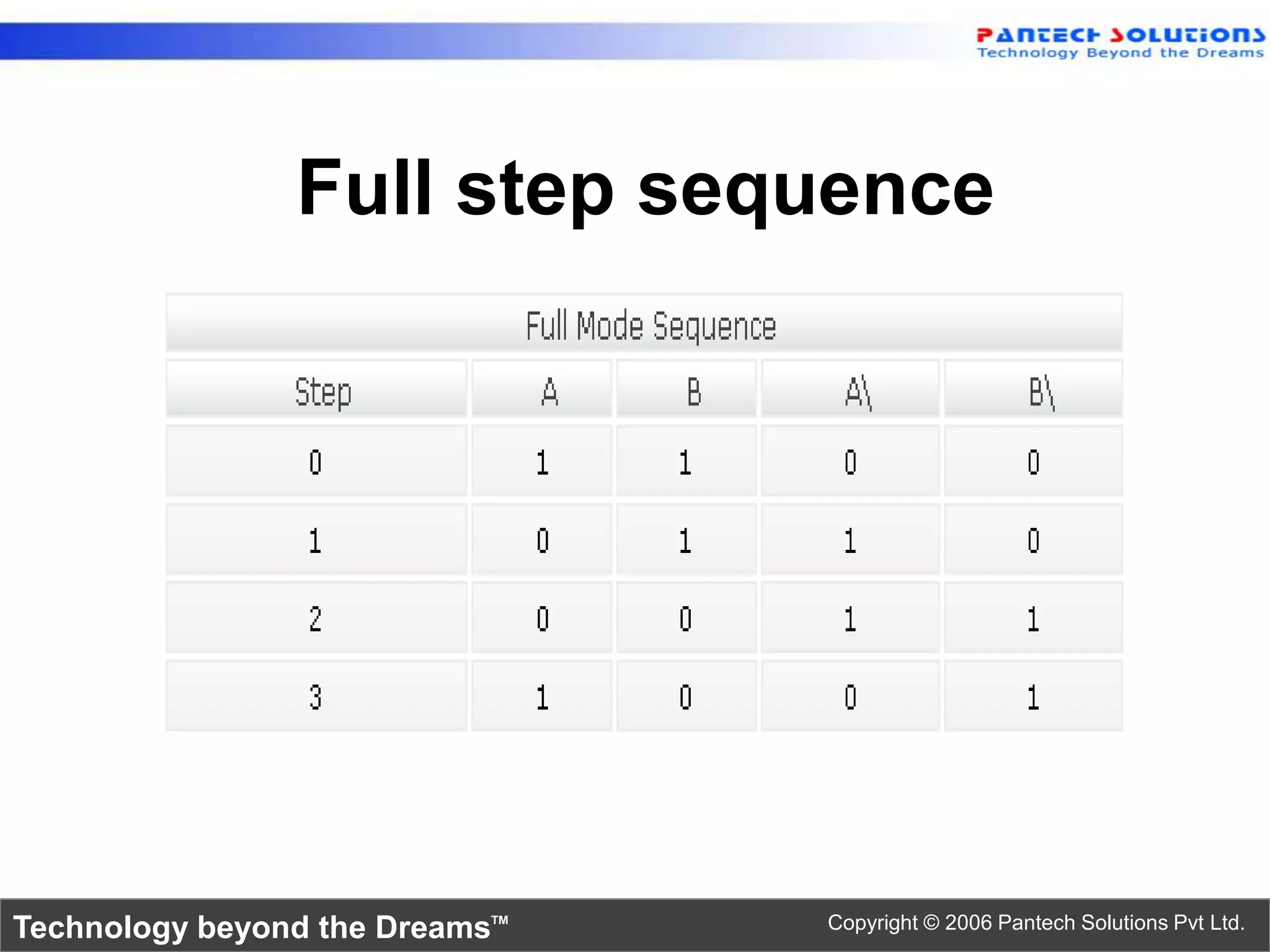
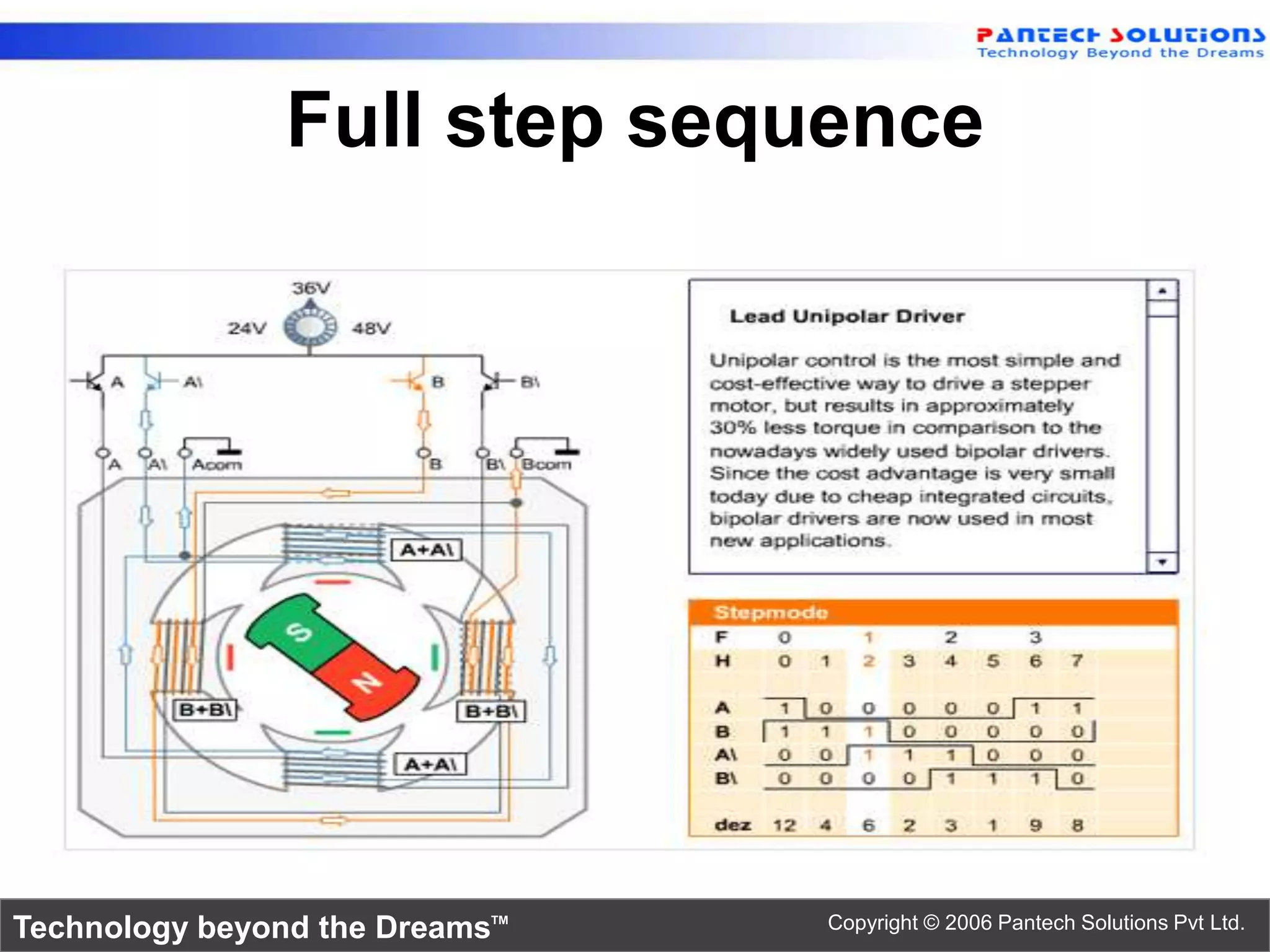
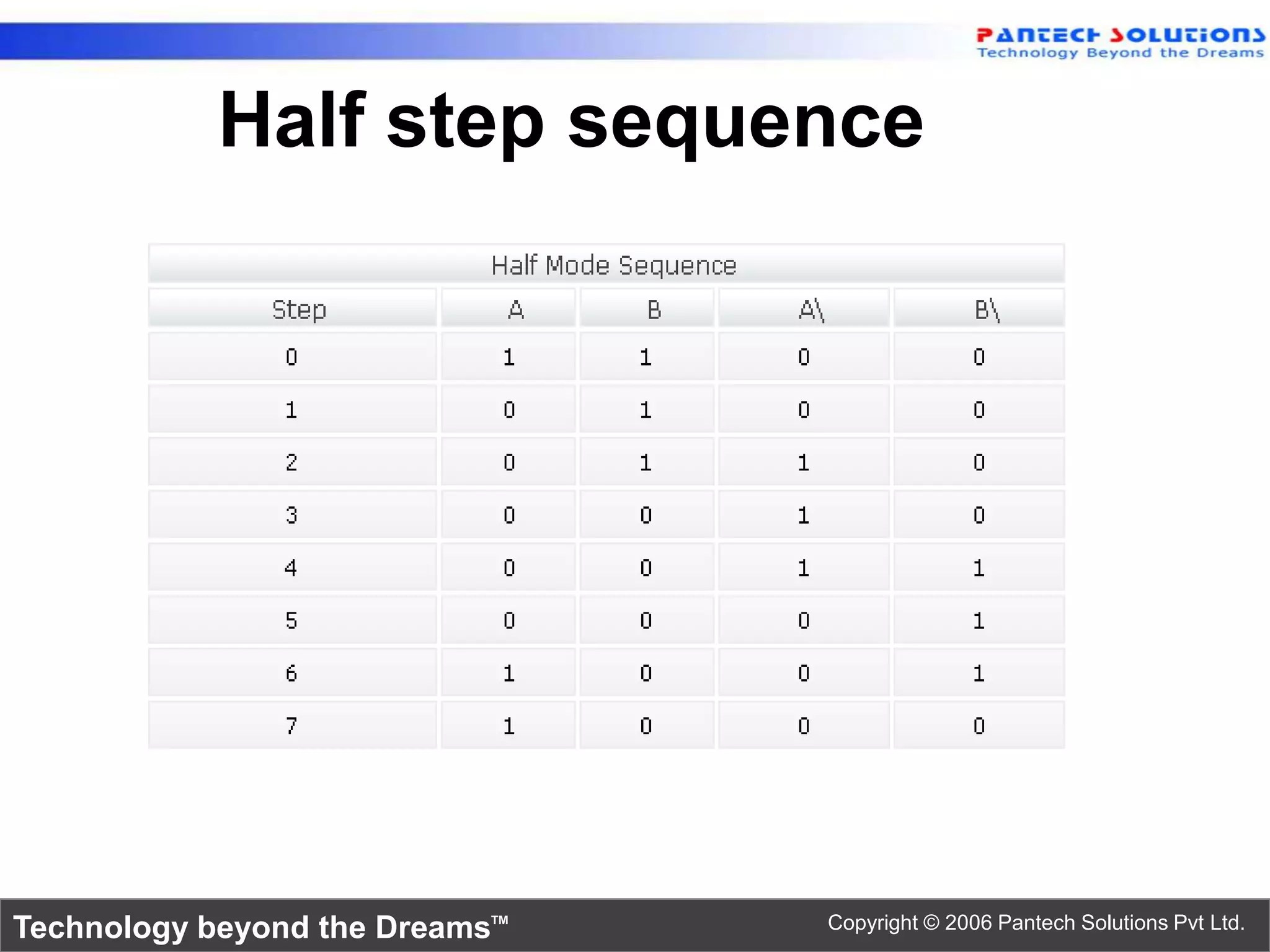
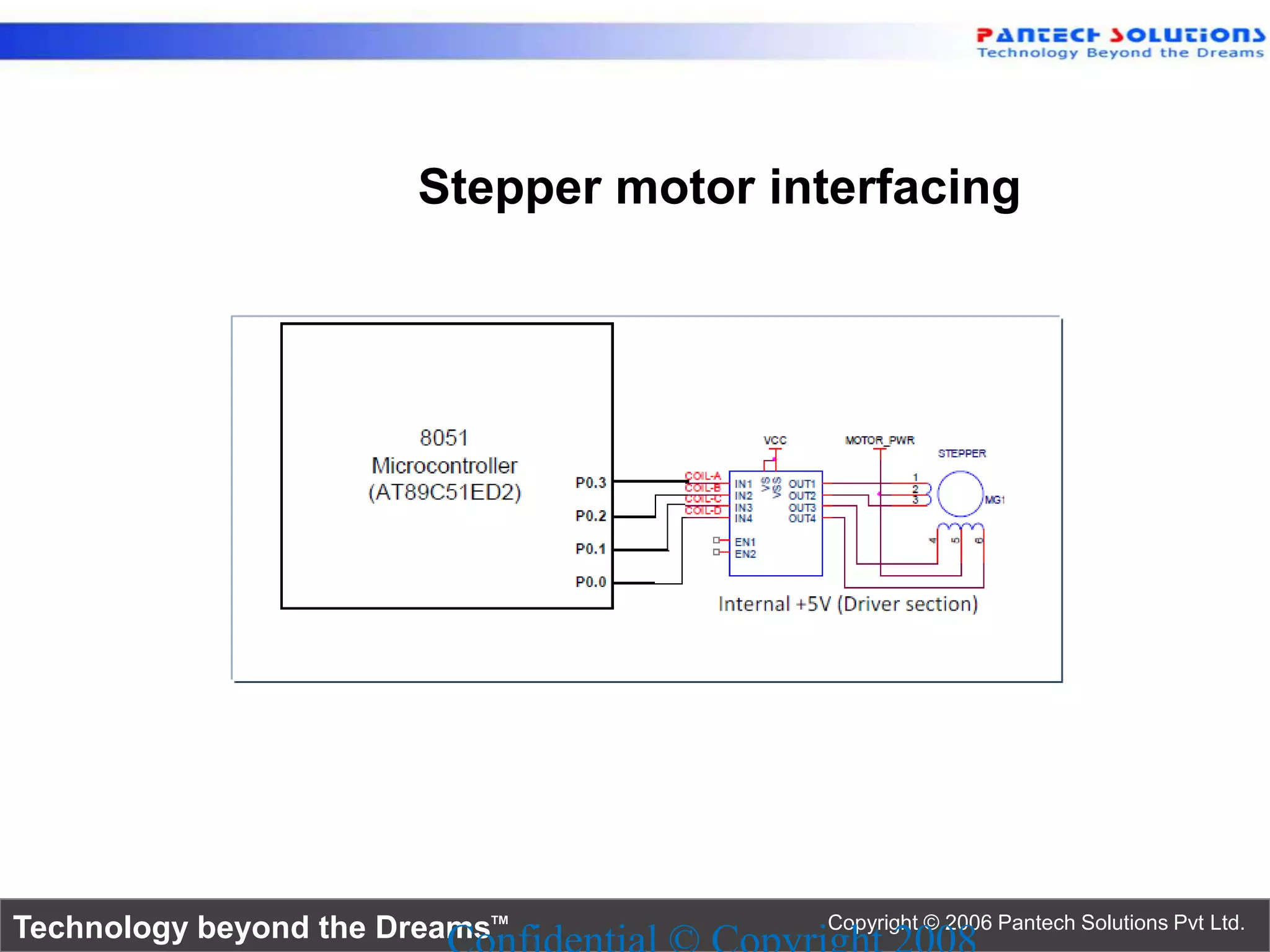
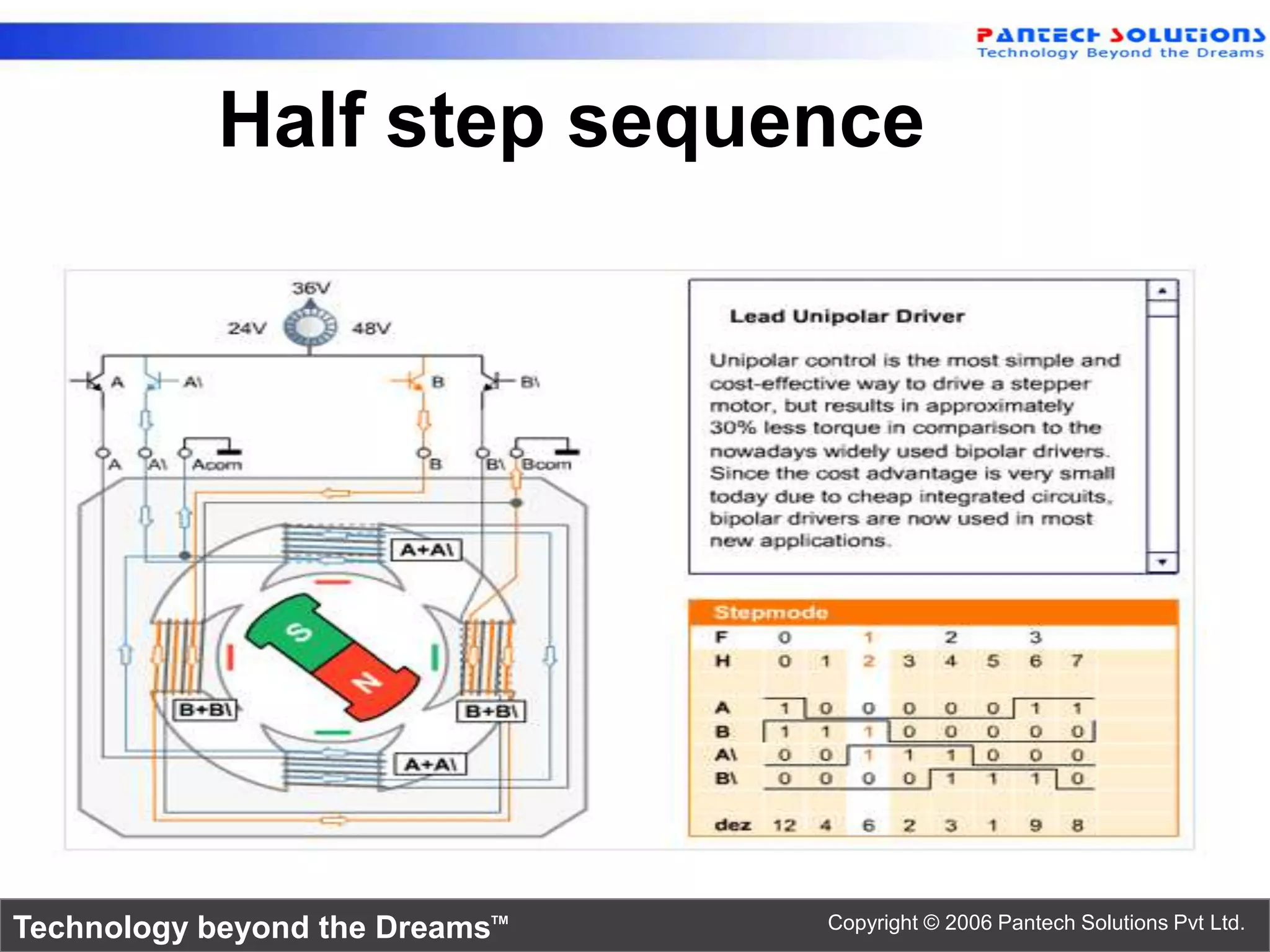

The document discusses interfacing a stepper motor with an 8051 microcontroller. A stepper motor can divide a full rotation into discrete steps through energizing coils in different sequences. The stepper motor can be interfaced with an 8051 using an L293D motor driver connected to ports P1.0, P1.2, P1.3, and P1.4 of the 8051. Both full-step and half-step sequences are described for energizing the coils to precisely control the motor's position without feedback. Assembly and C code examples are provided to demonstrate clockwise and counterclockwise rotation of the stepper motor connected to the 8051.































































































