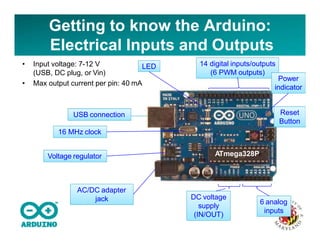
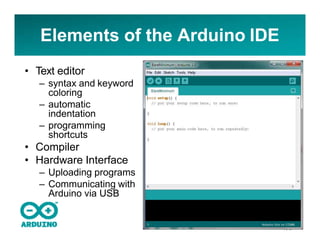
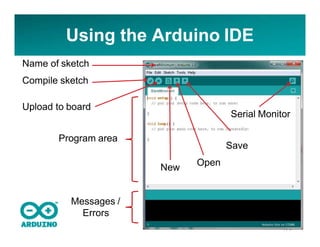
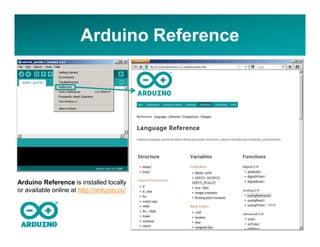
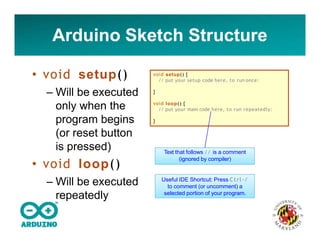
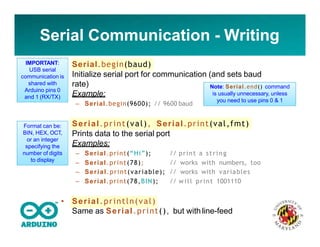
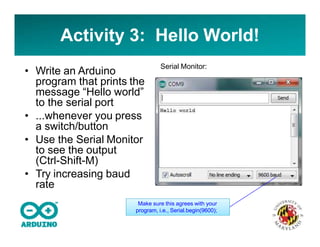
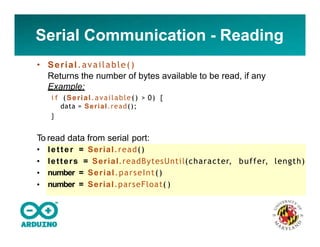
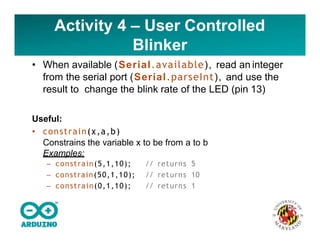
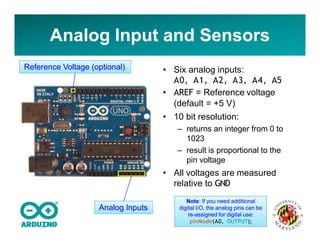
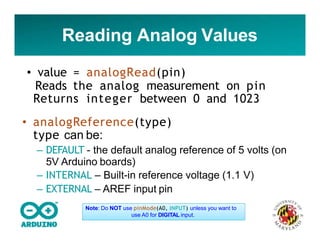
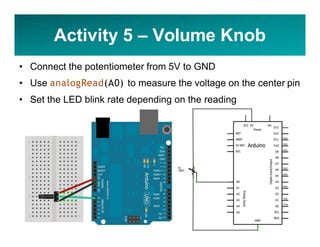
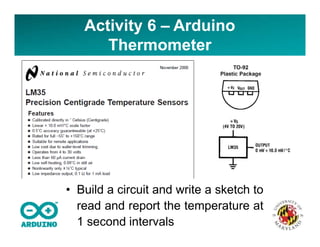
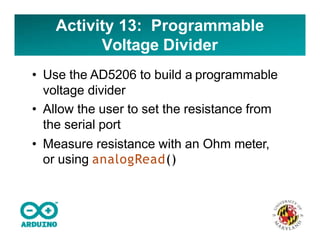
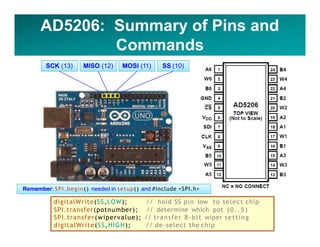
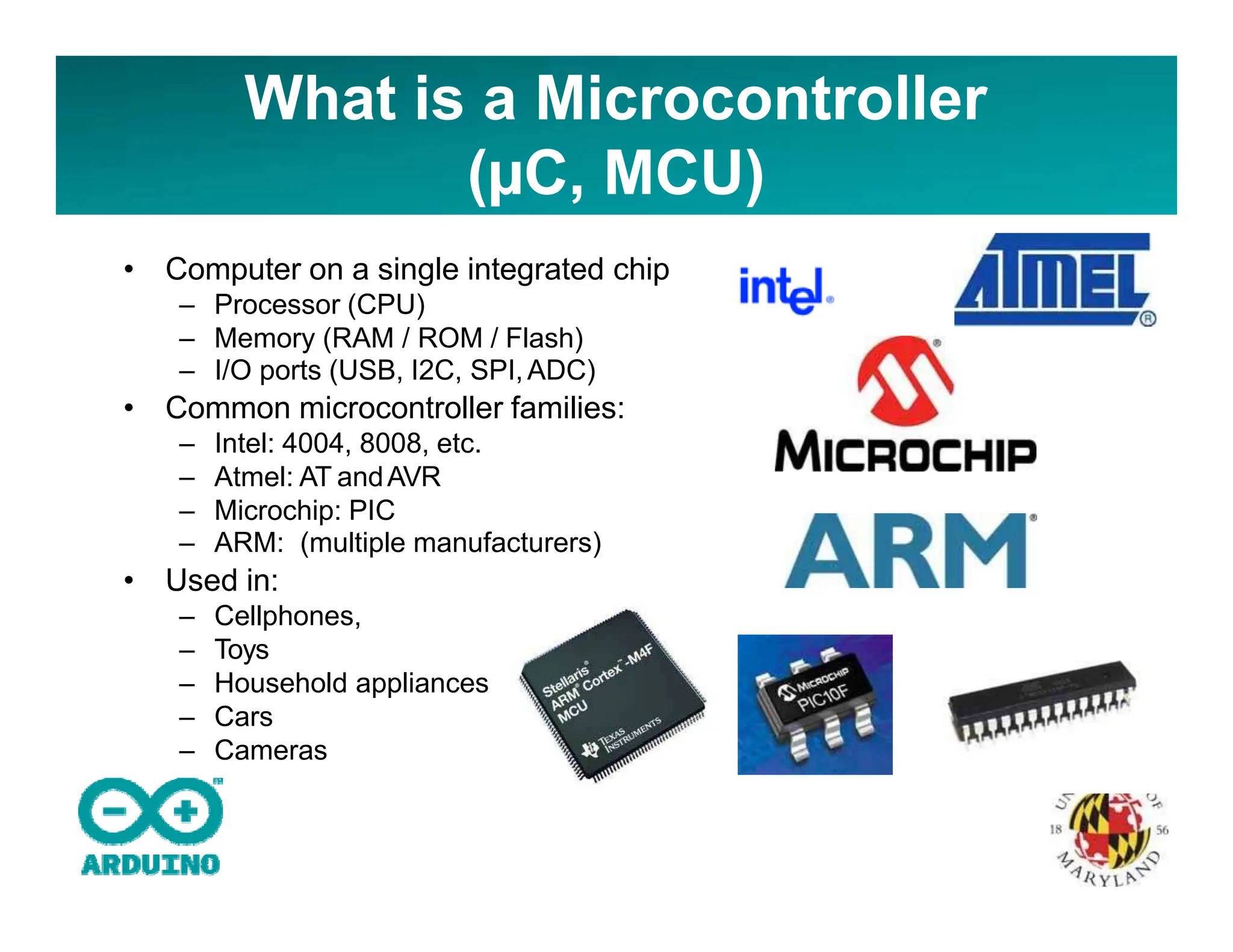
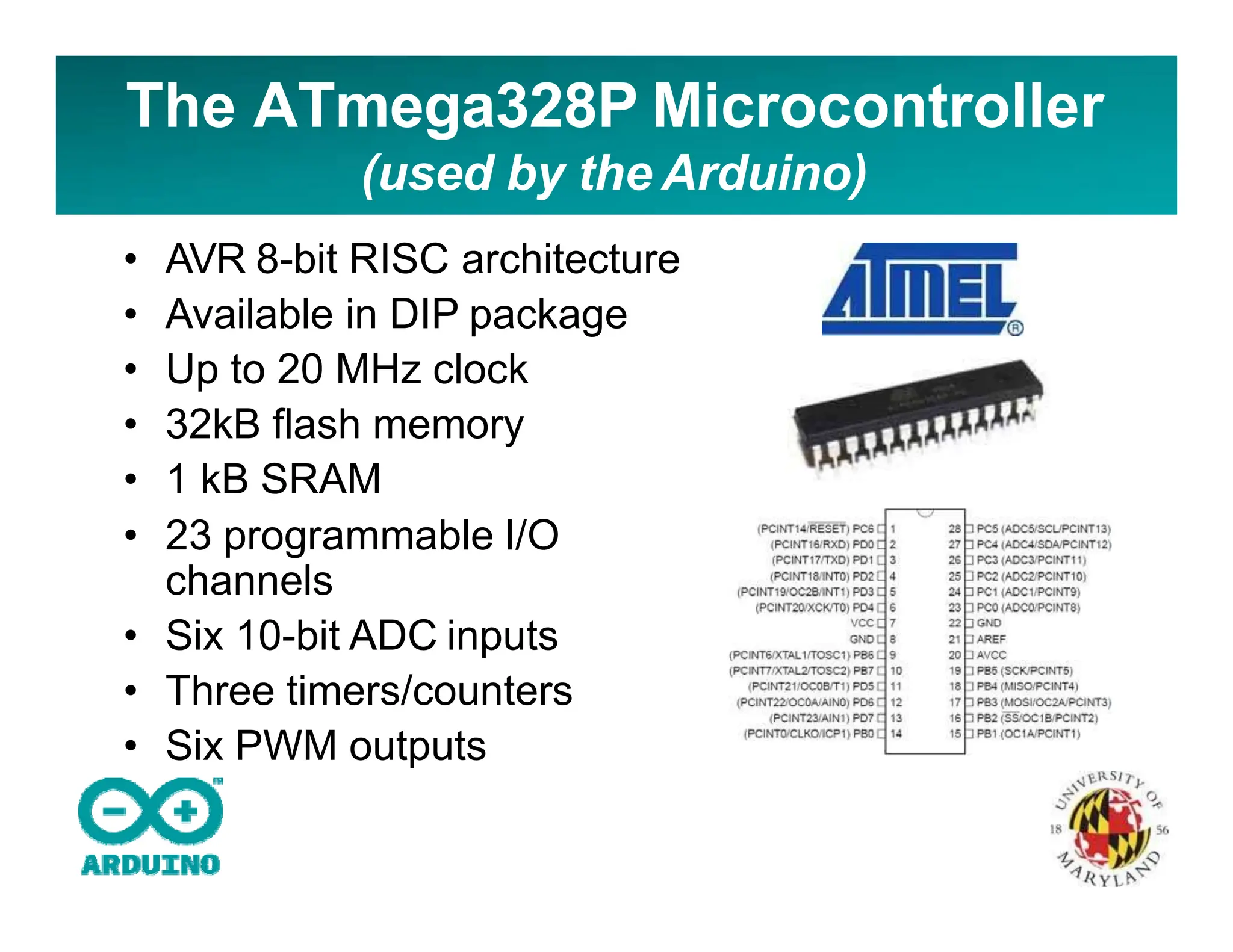
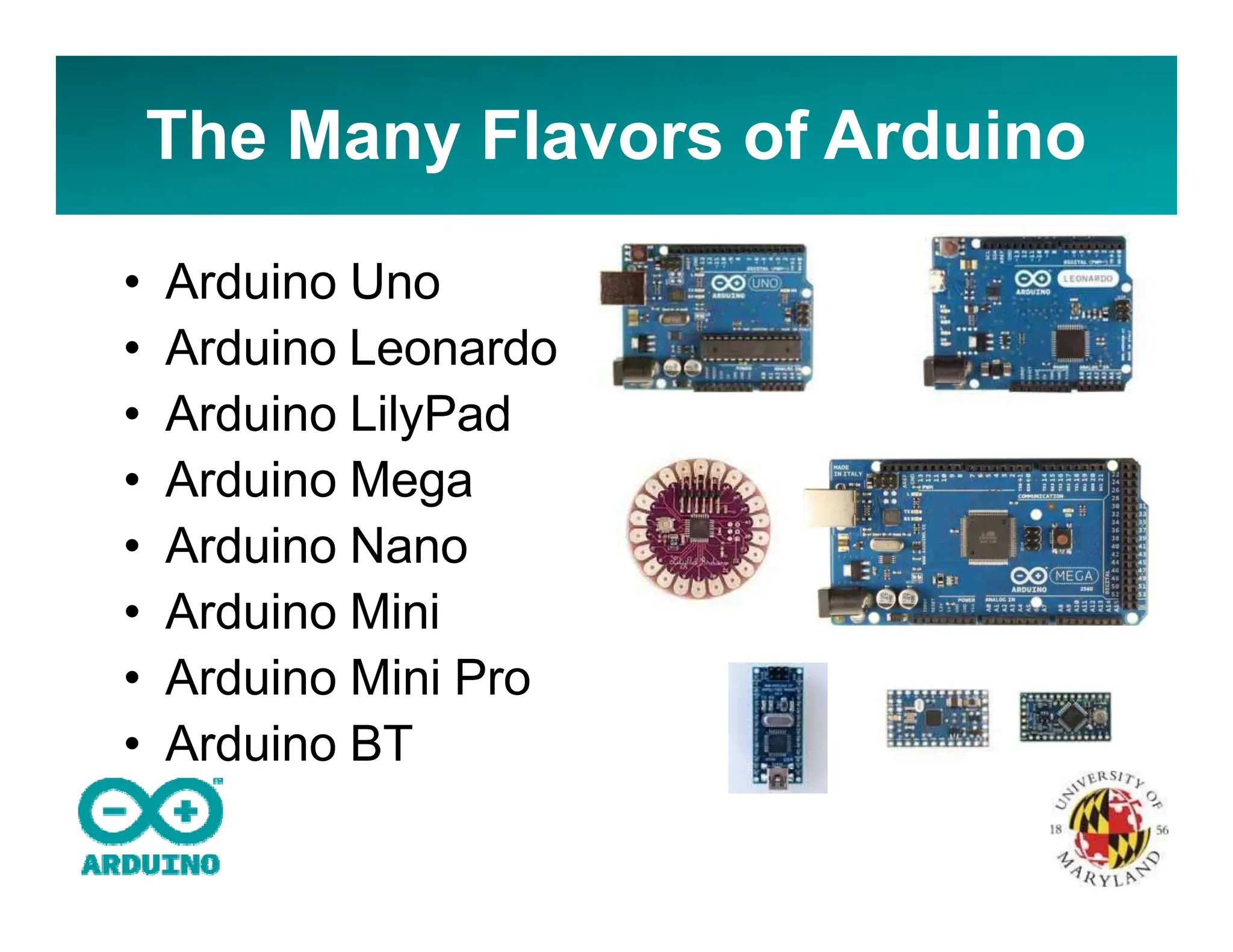
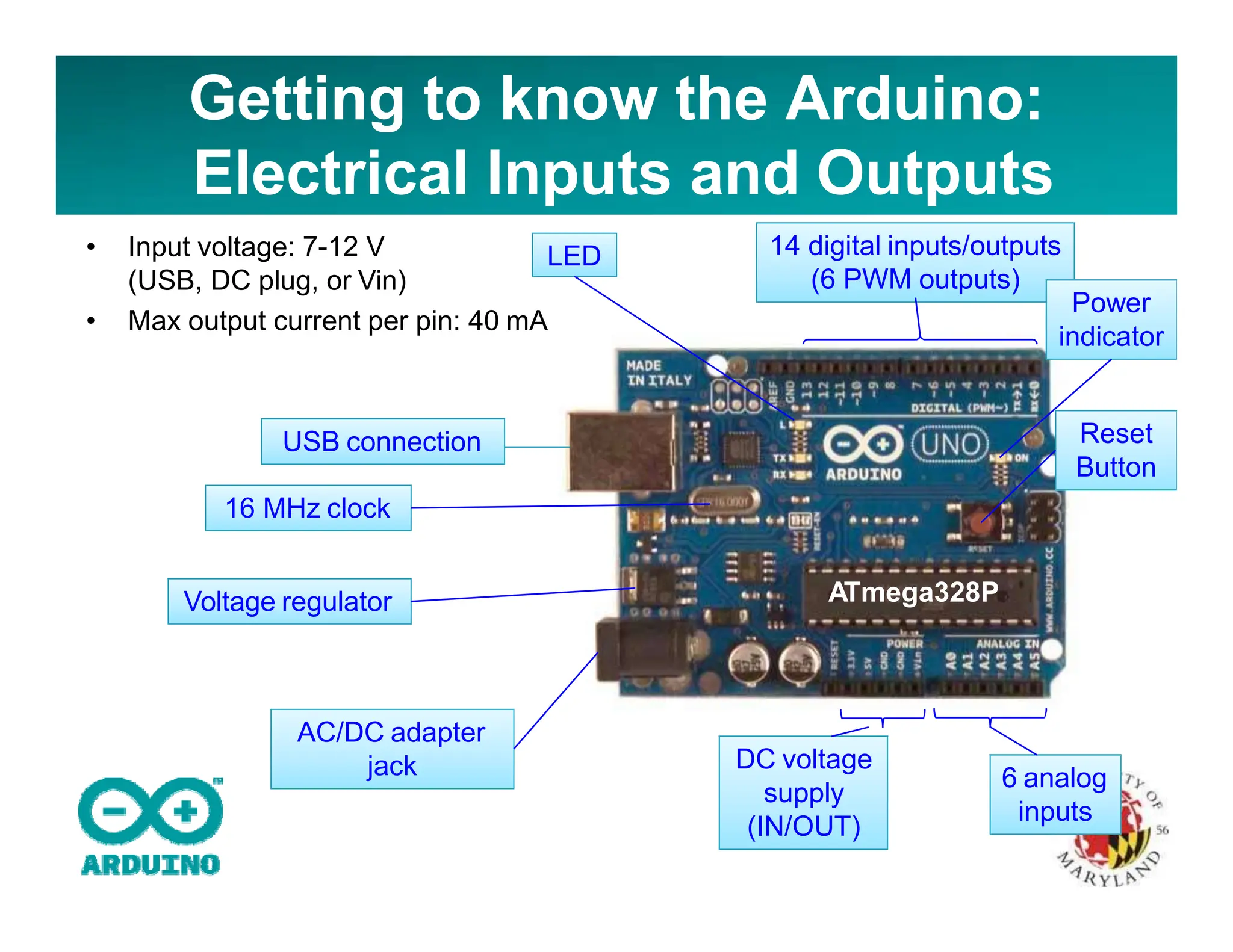
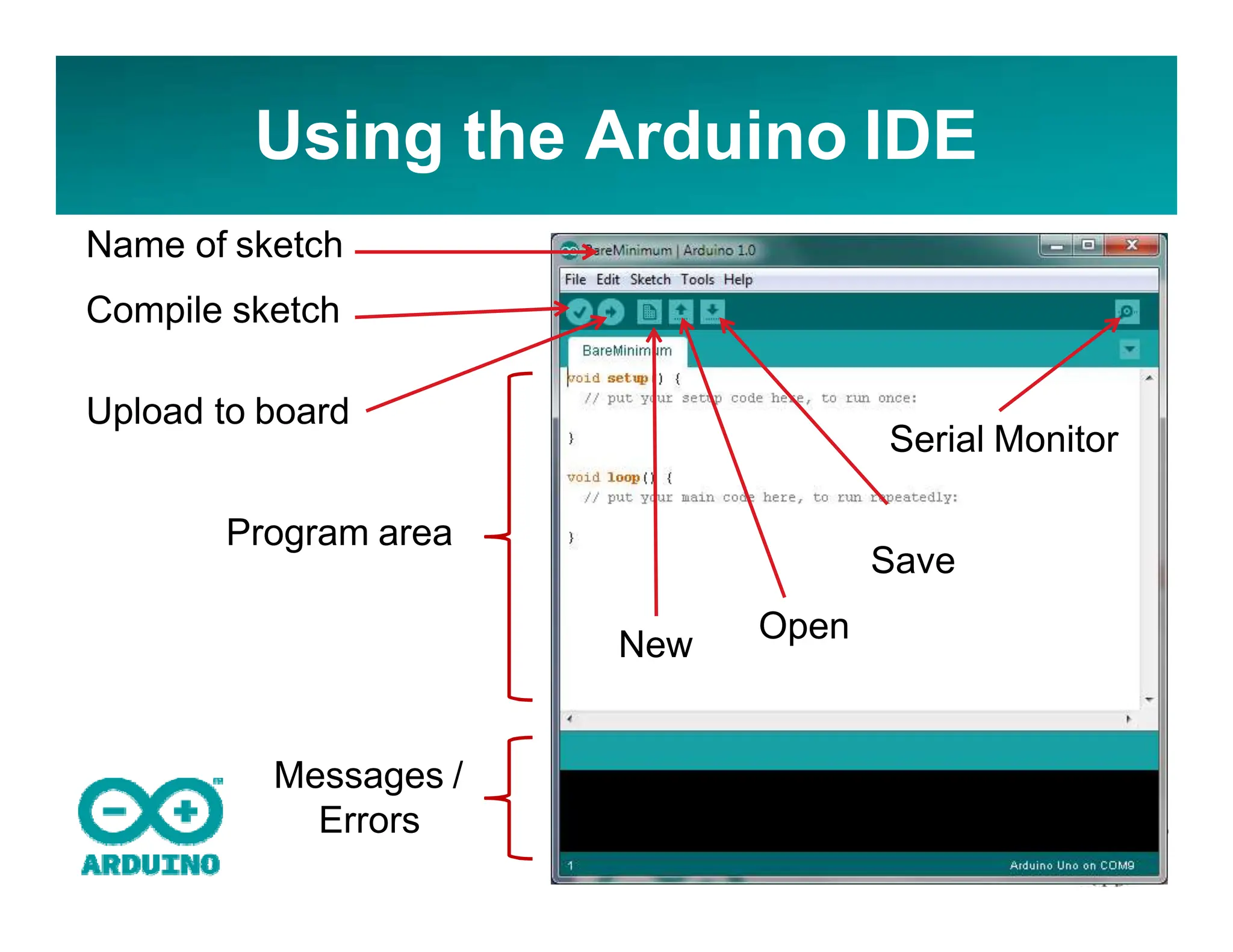
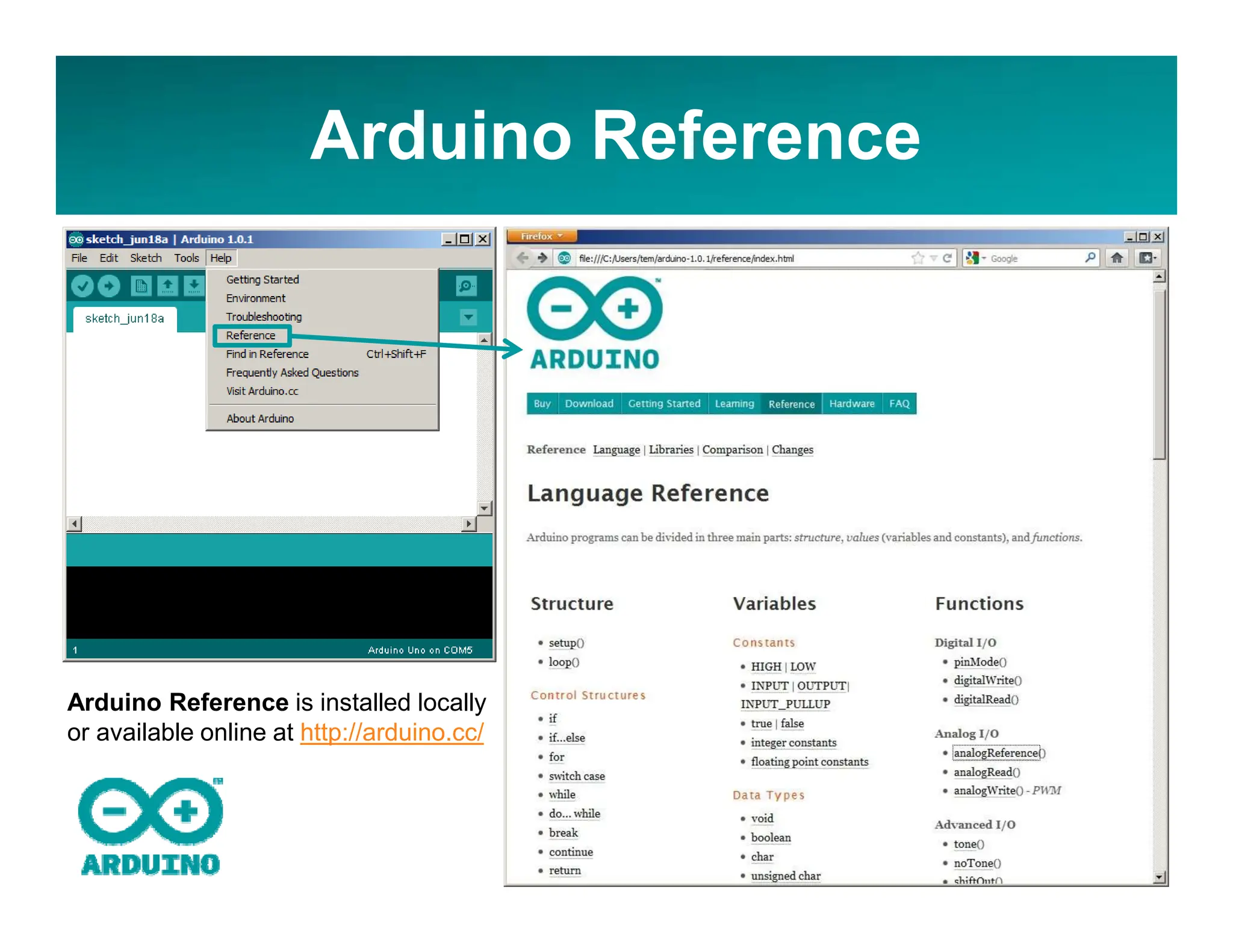
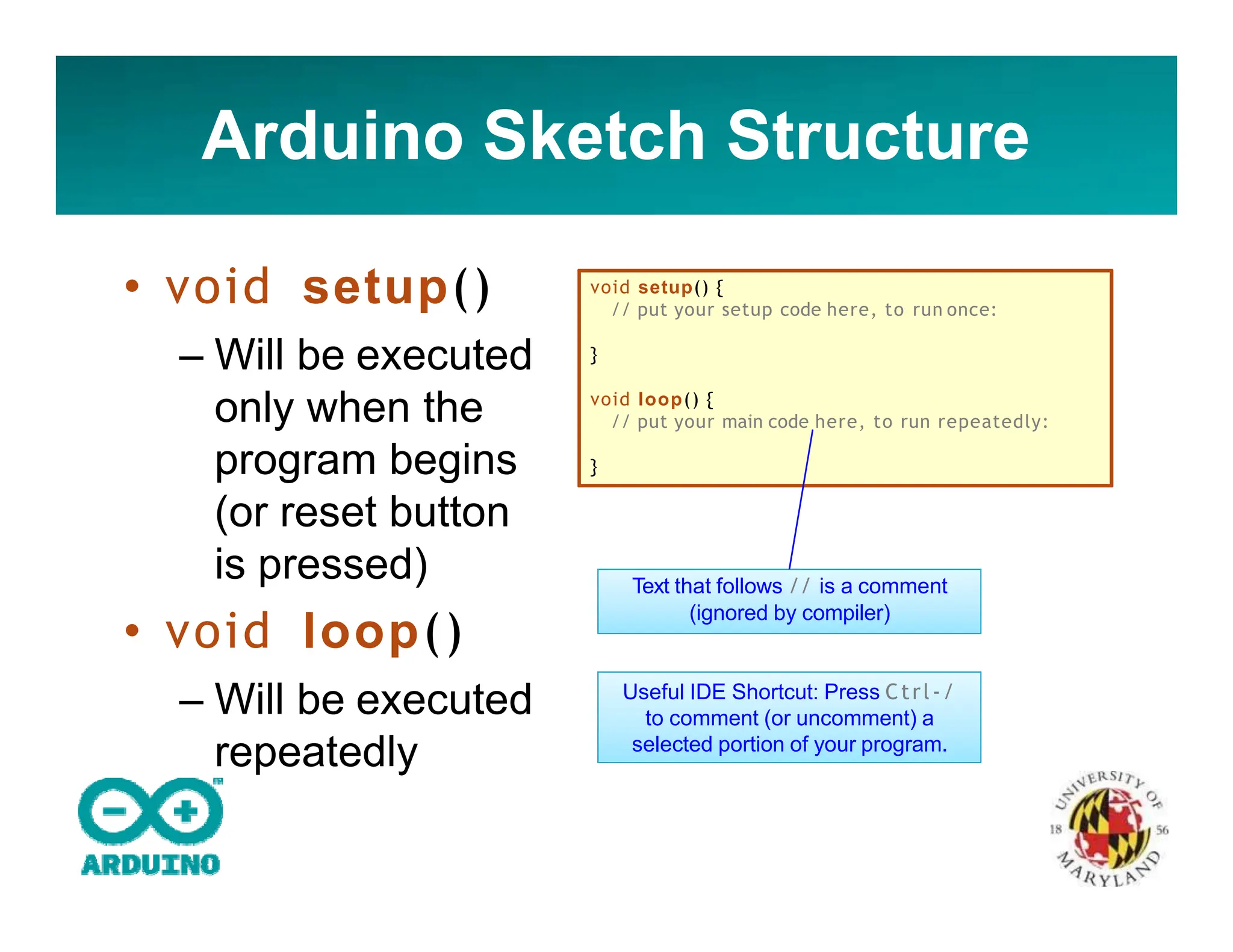
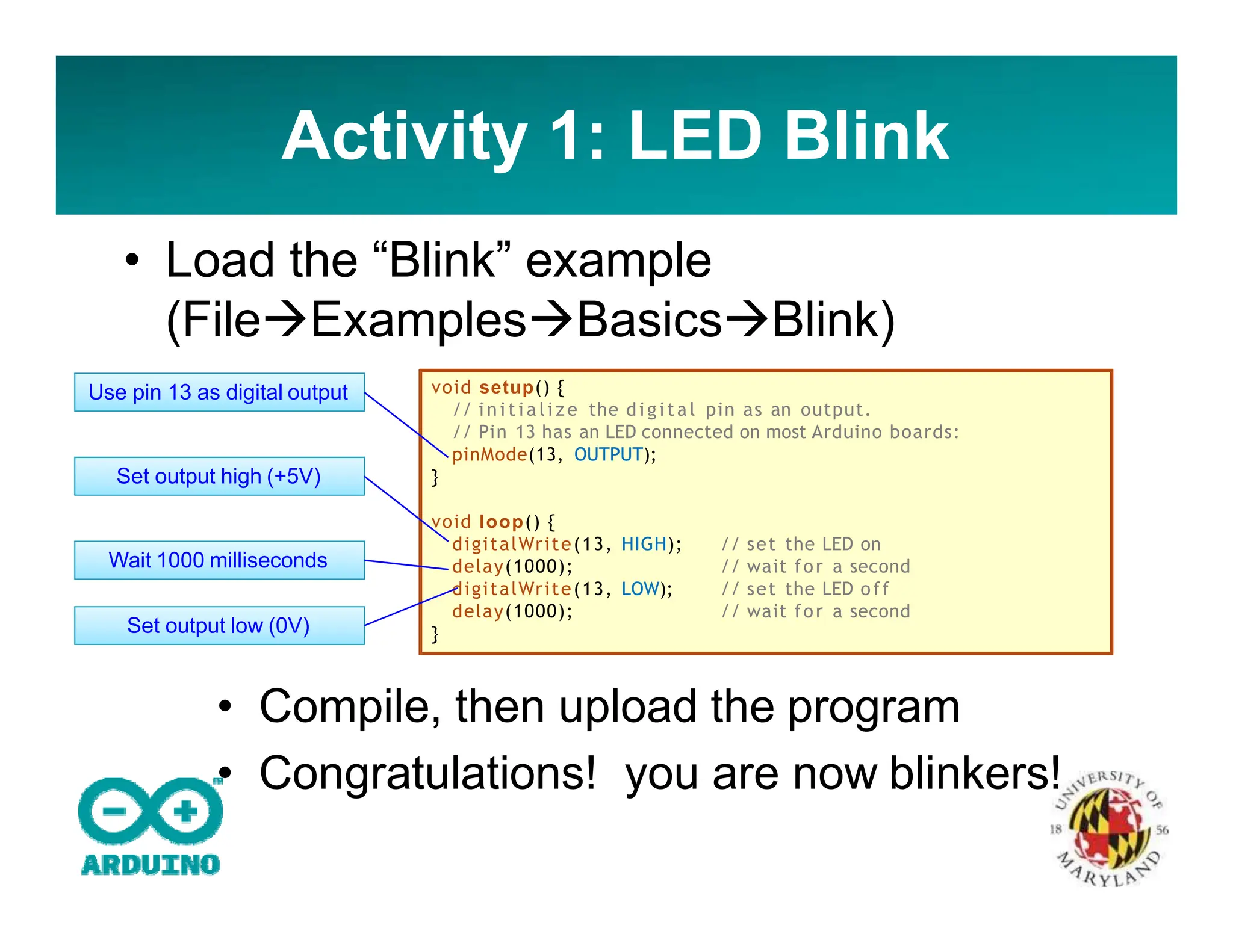
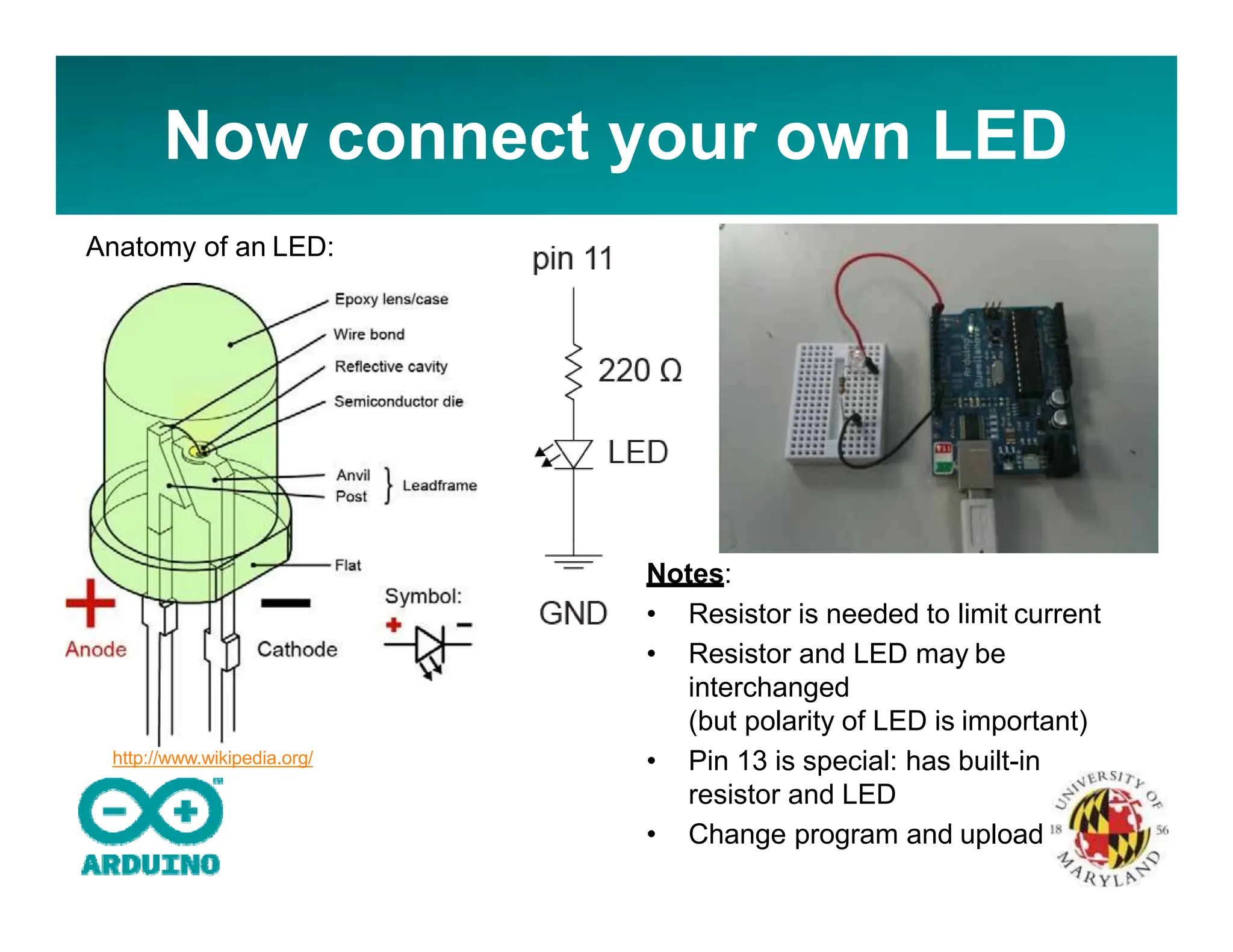
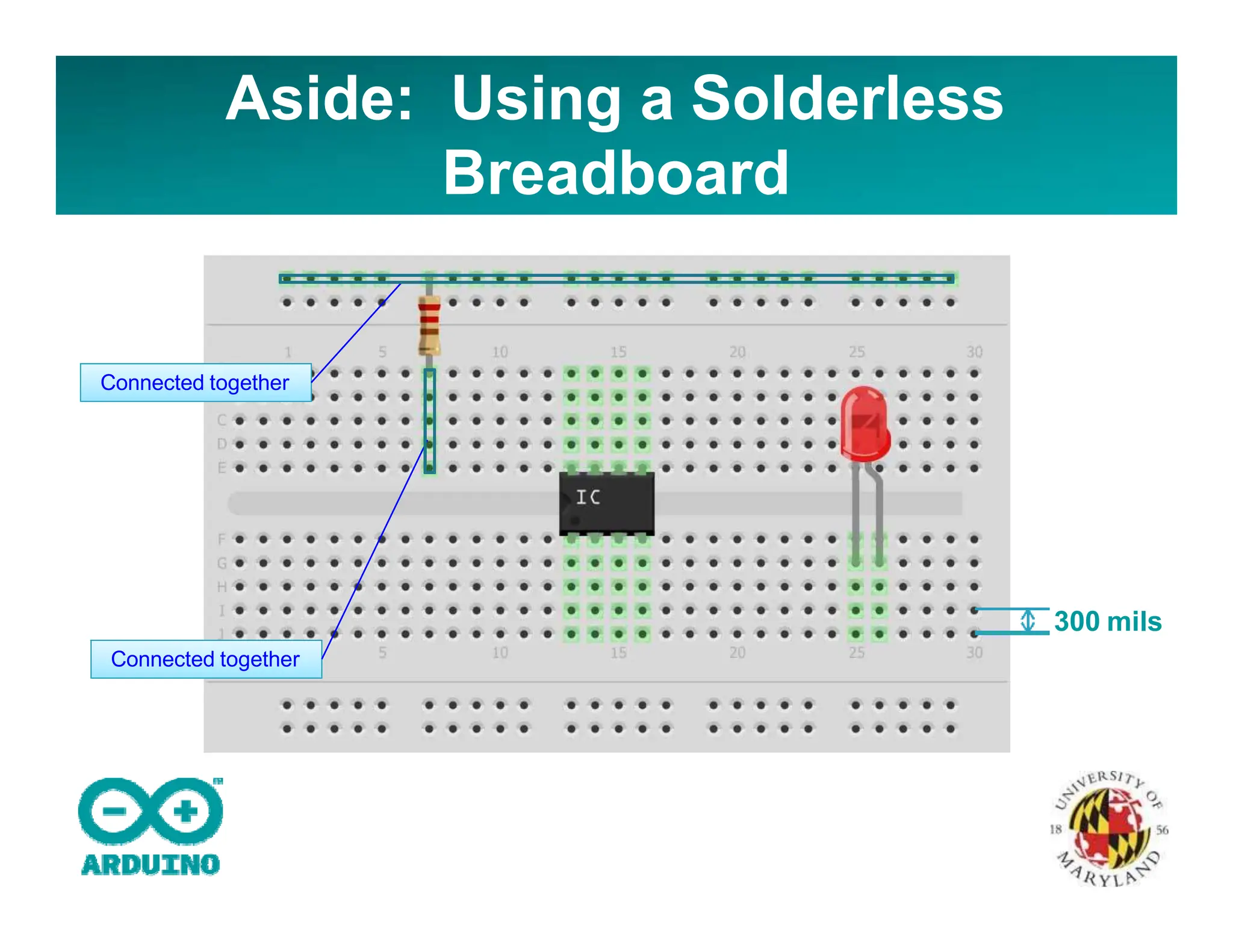
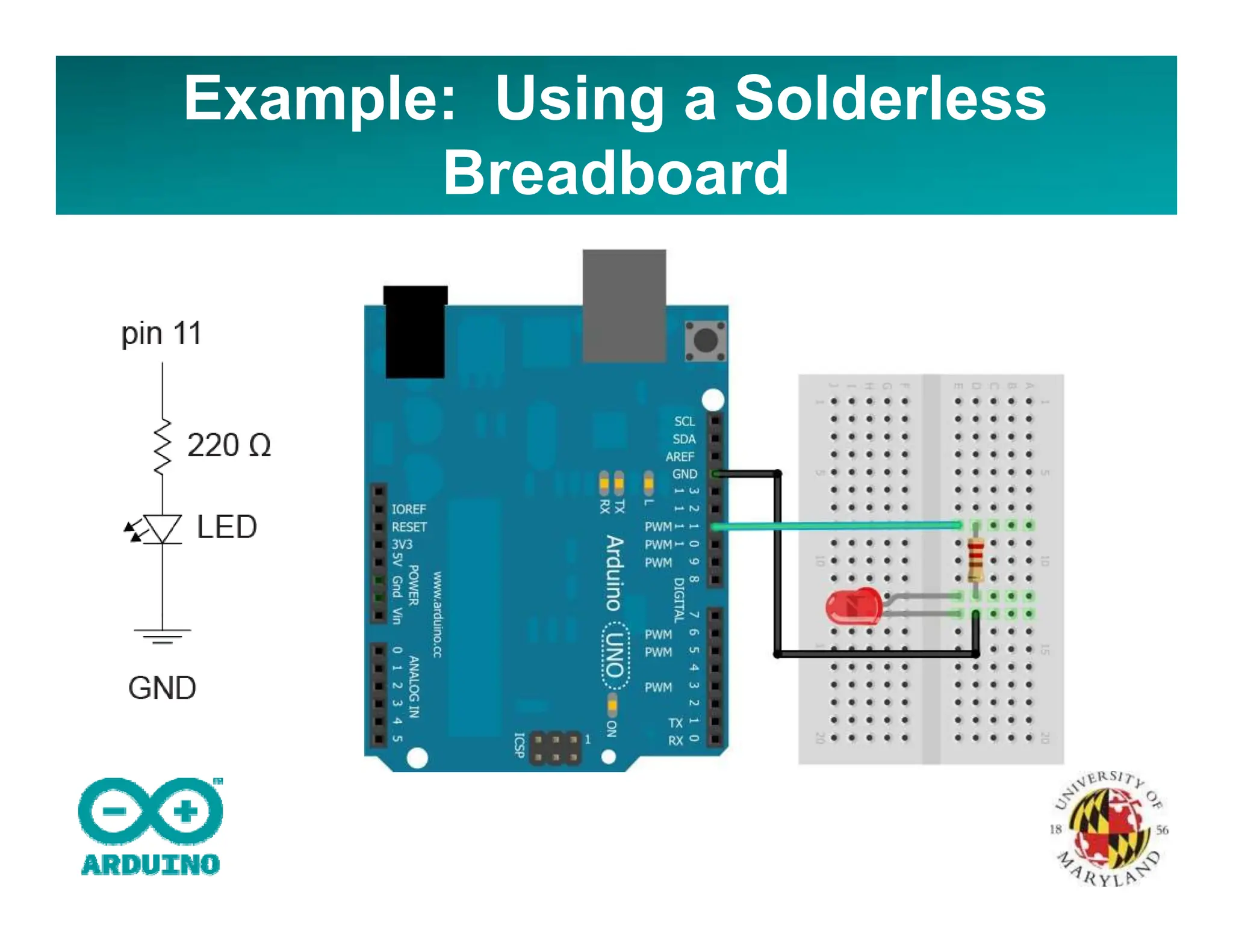
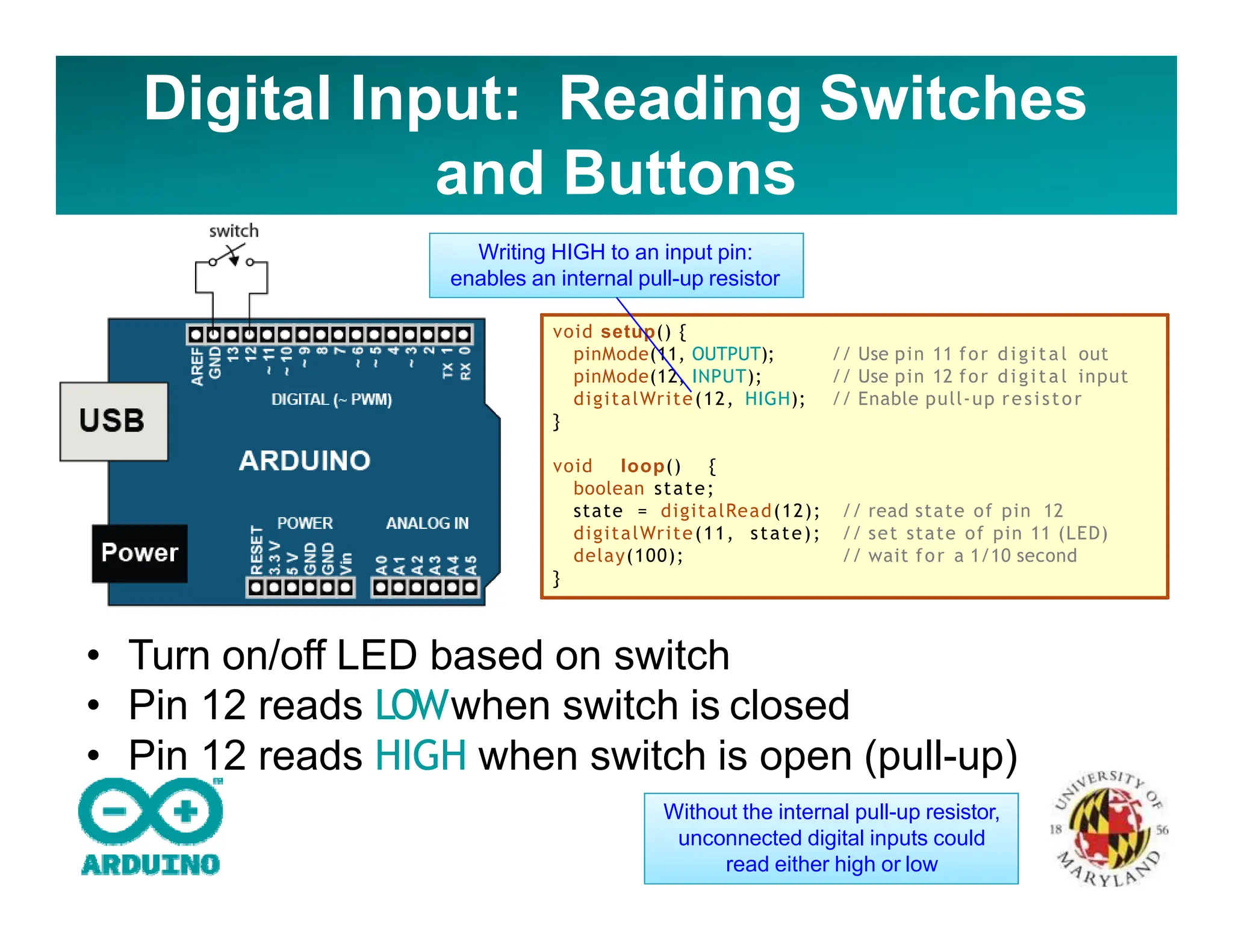
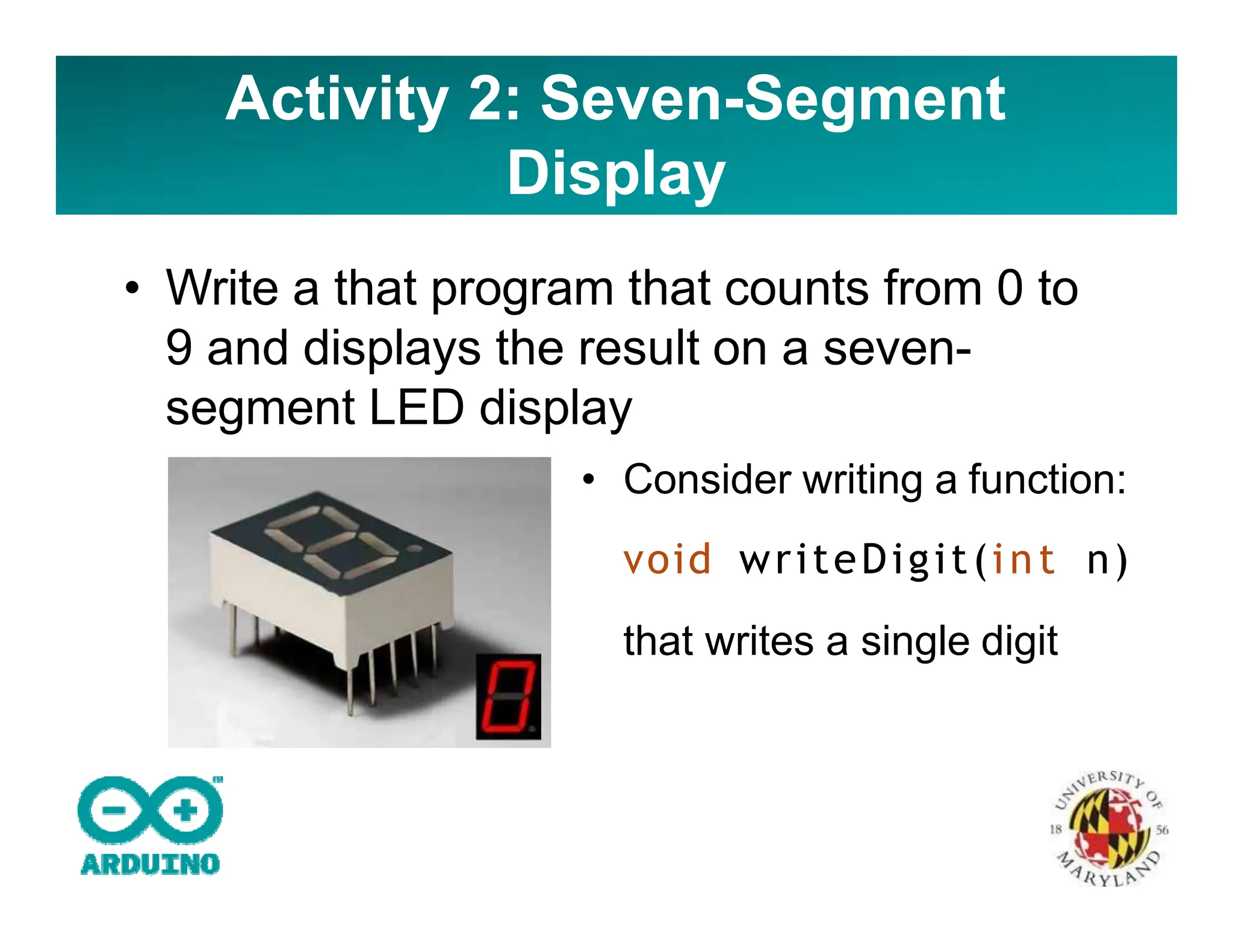
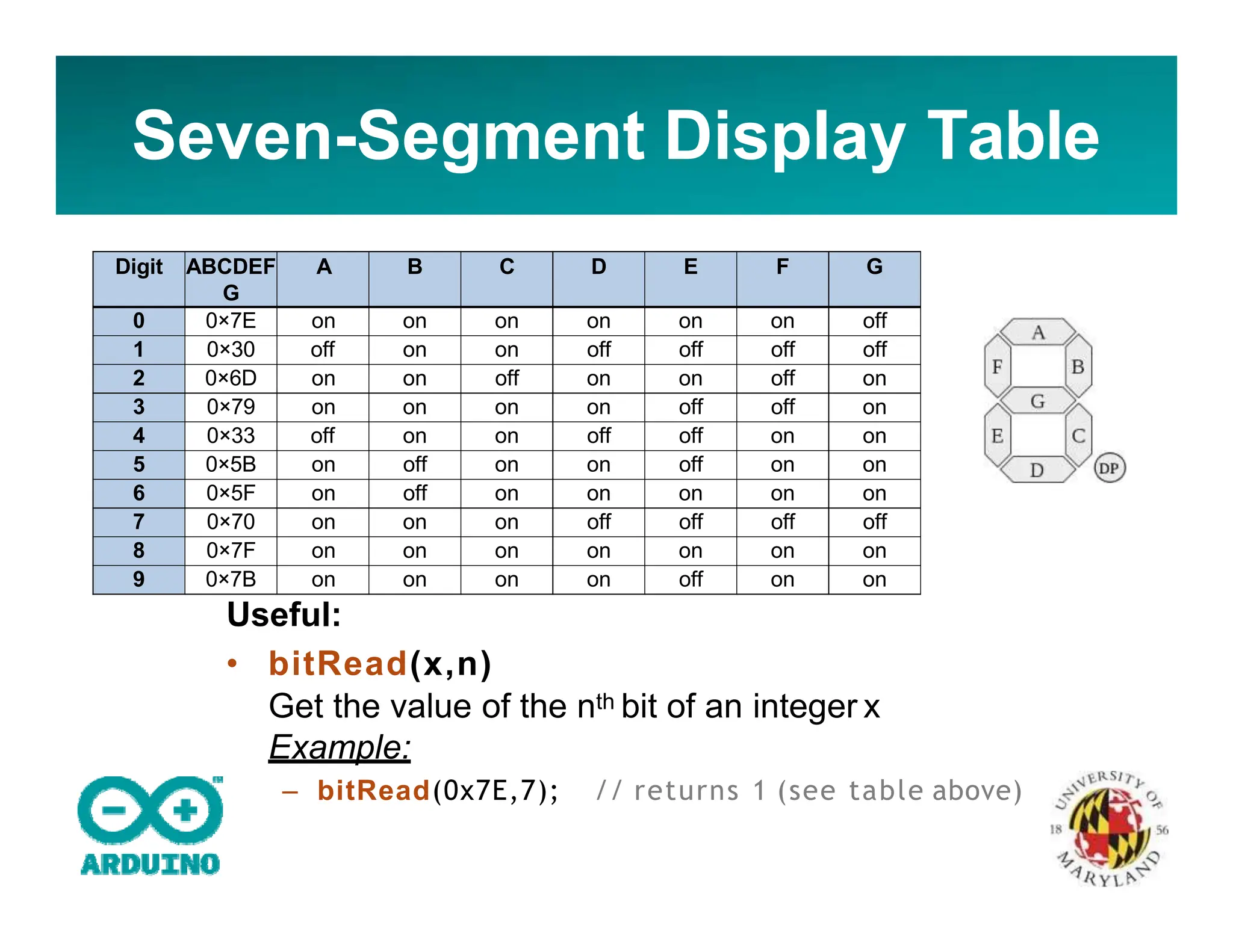
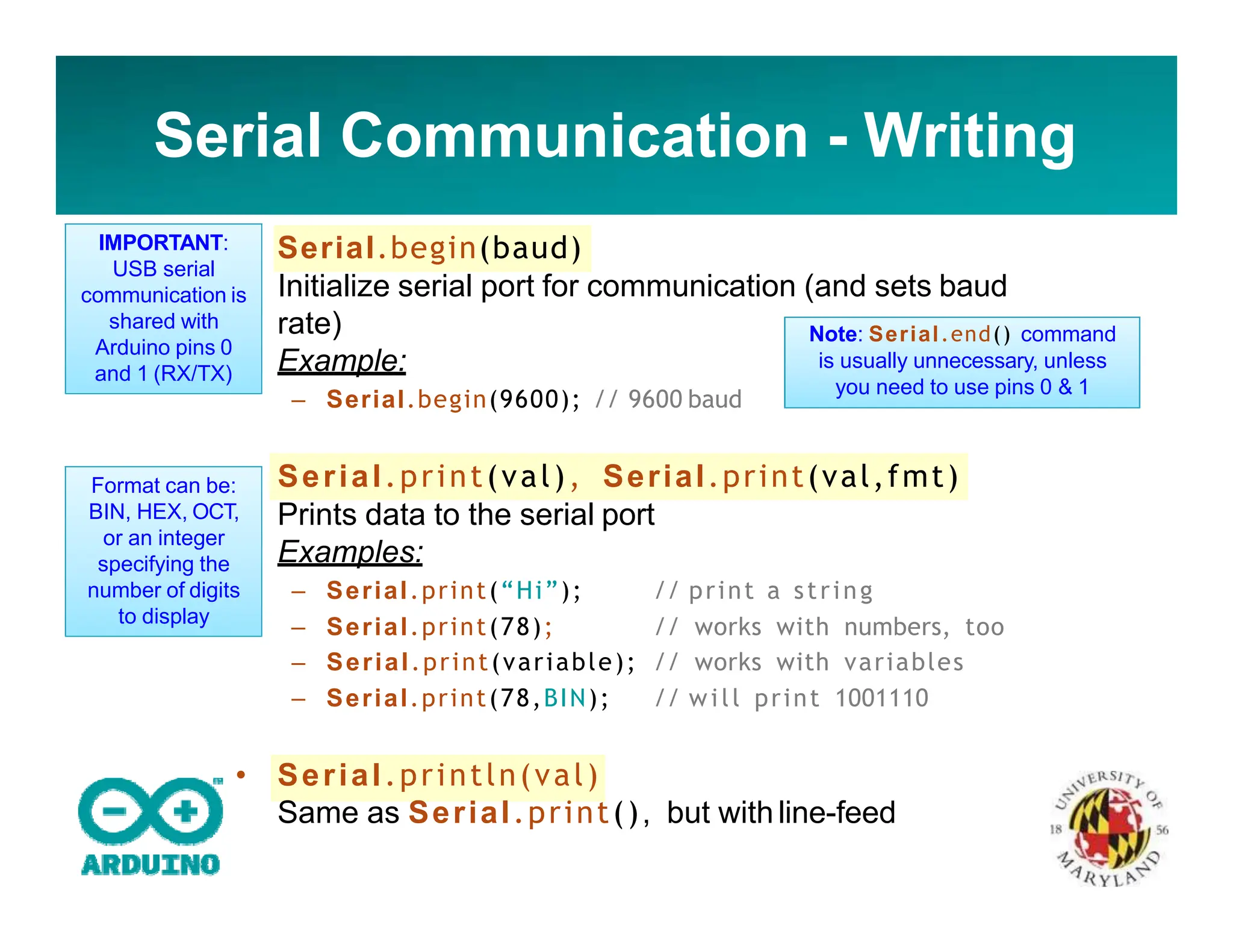
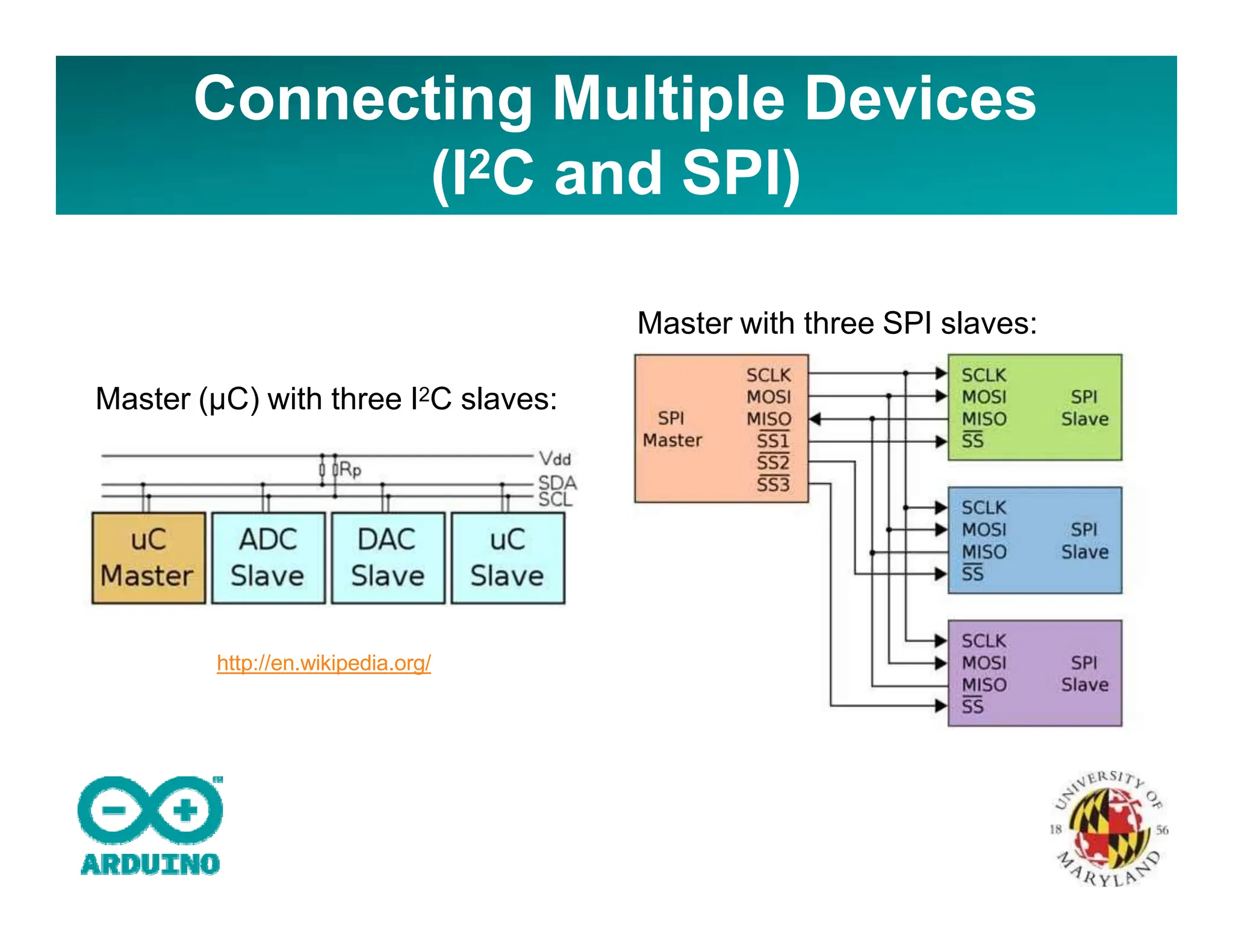
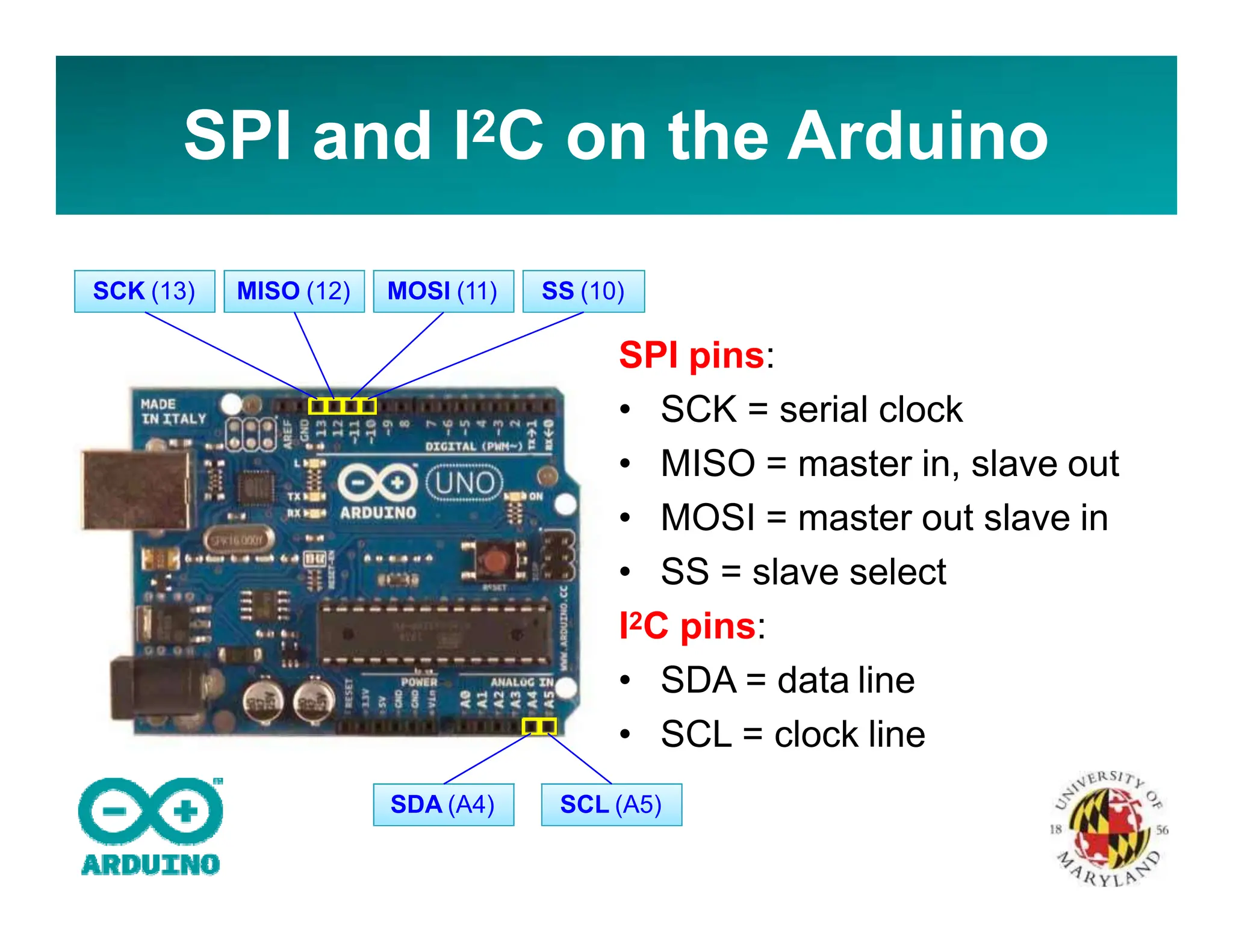
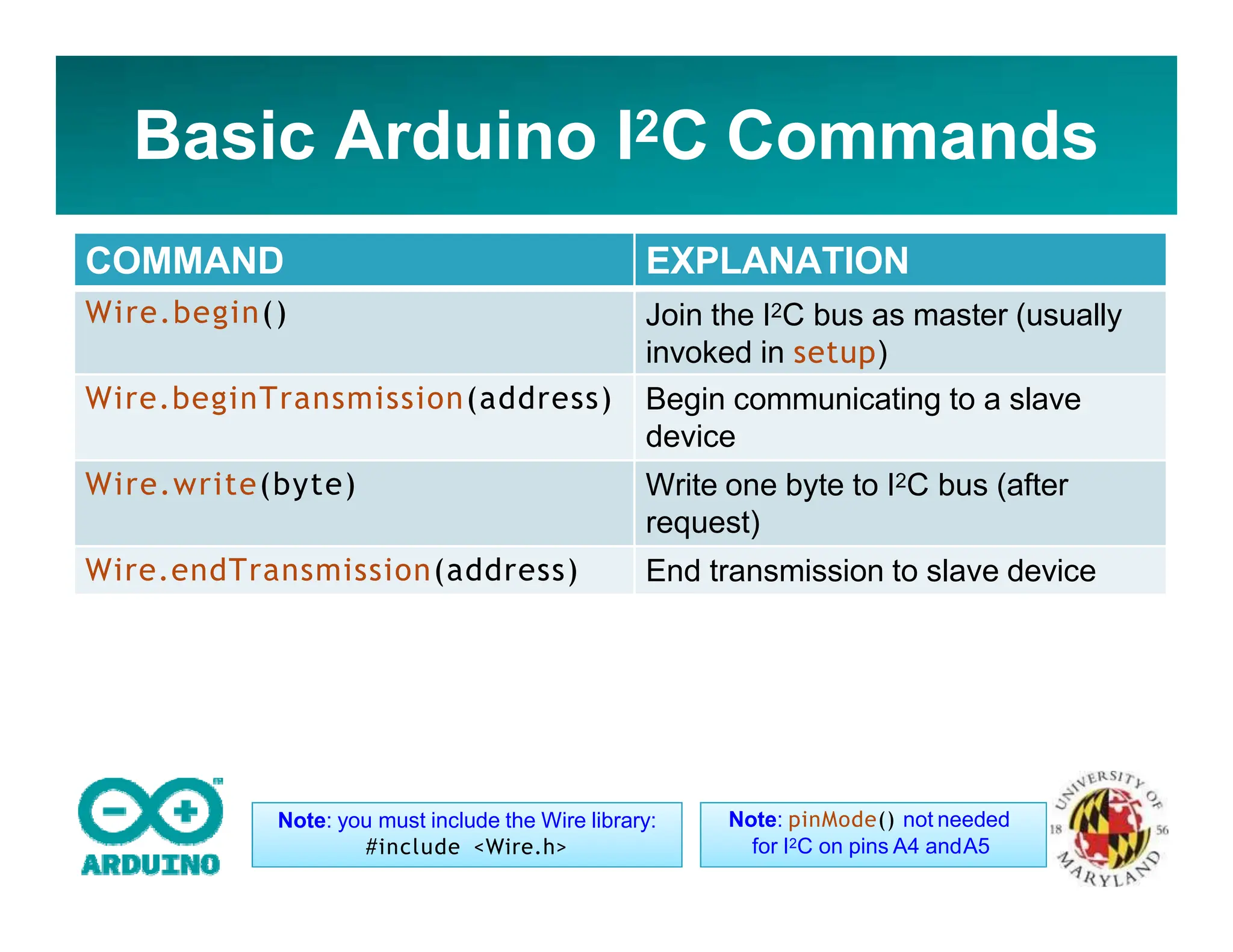
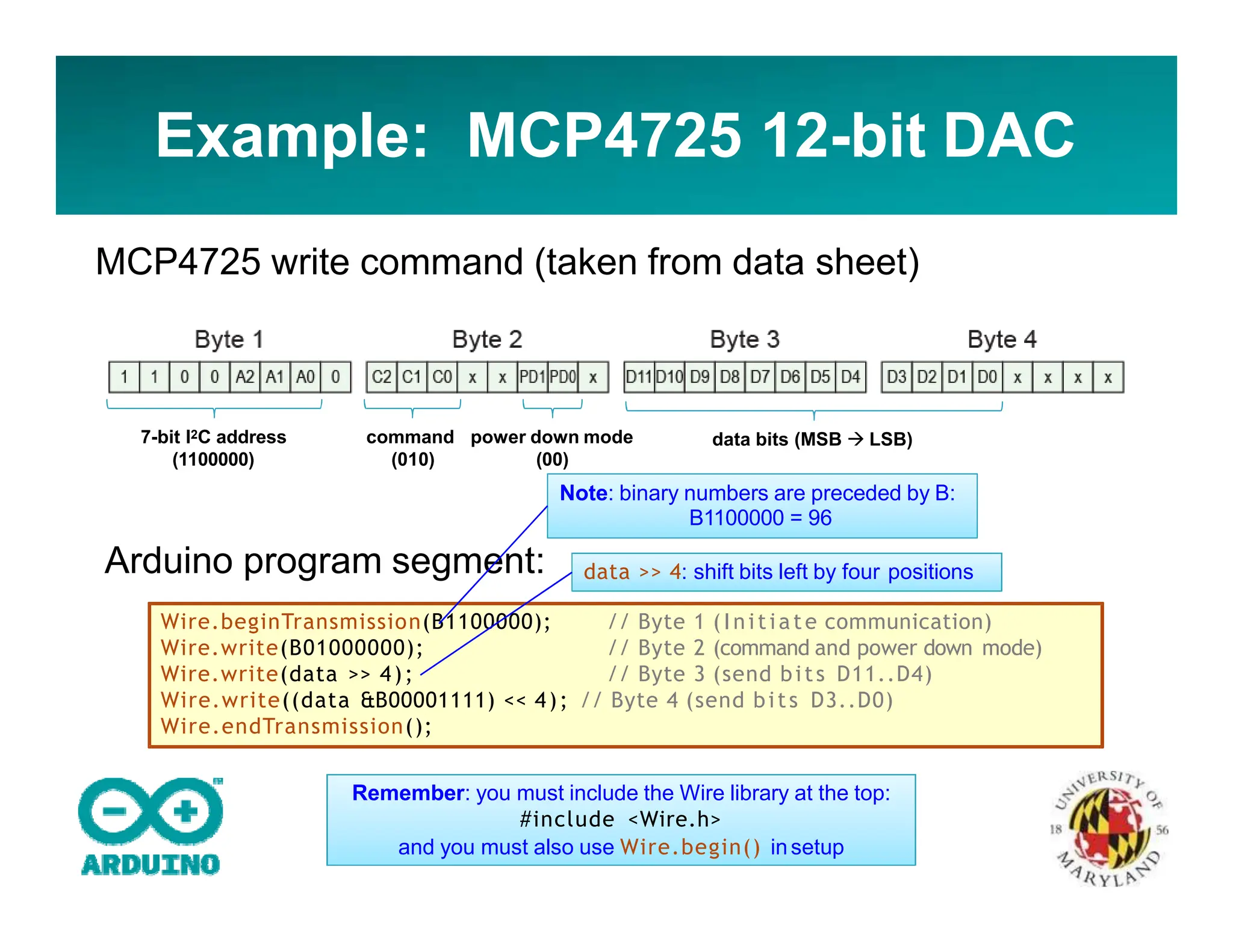
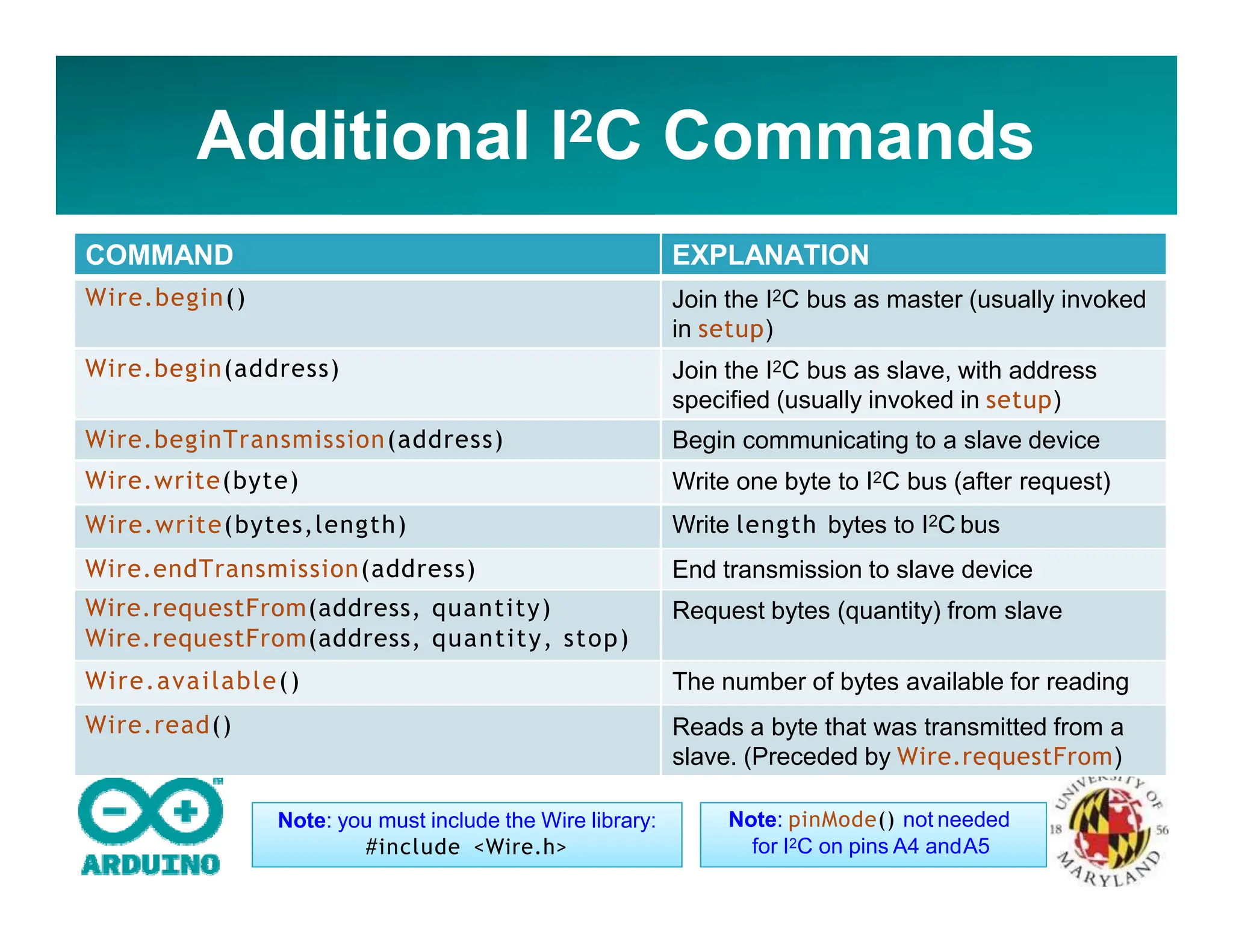
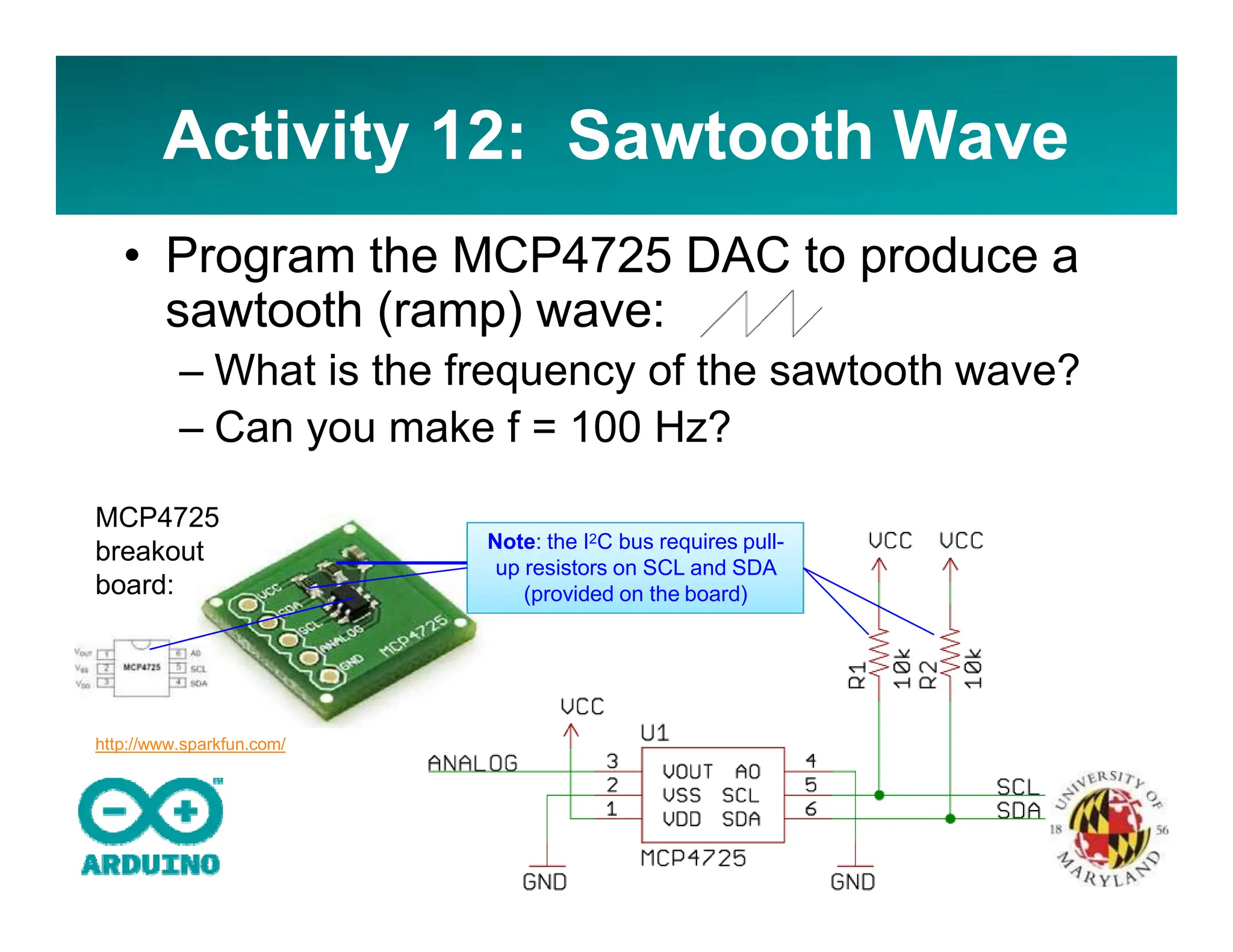
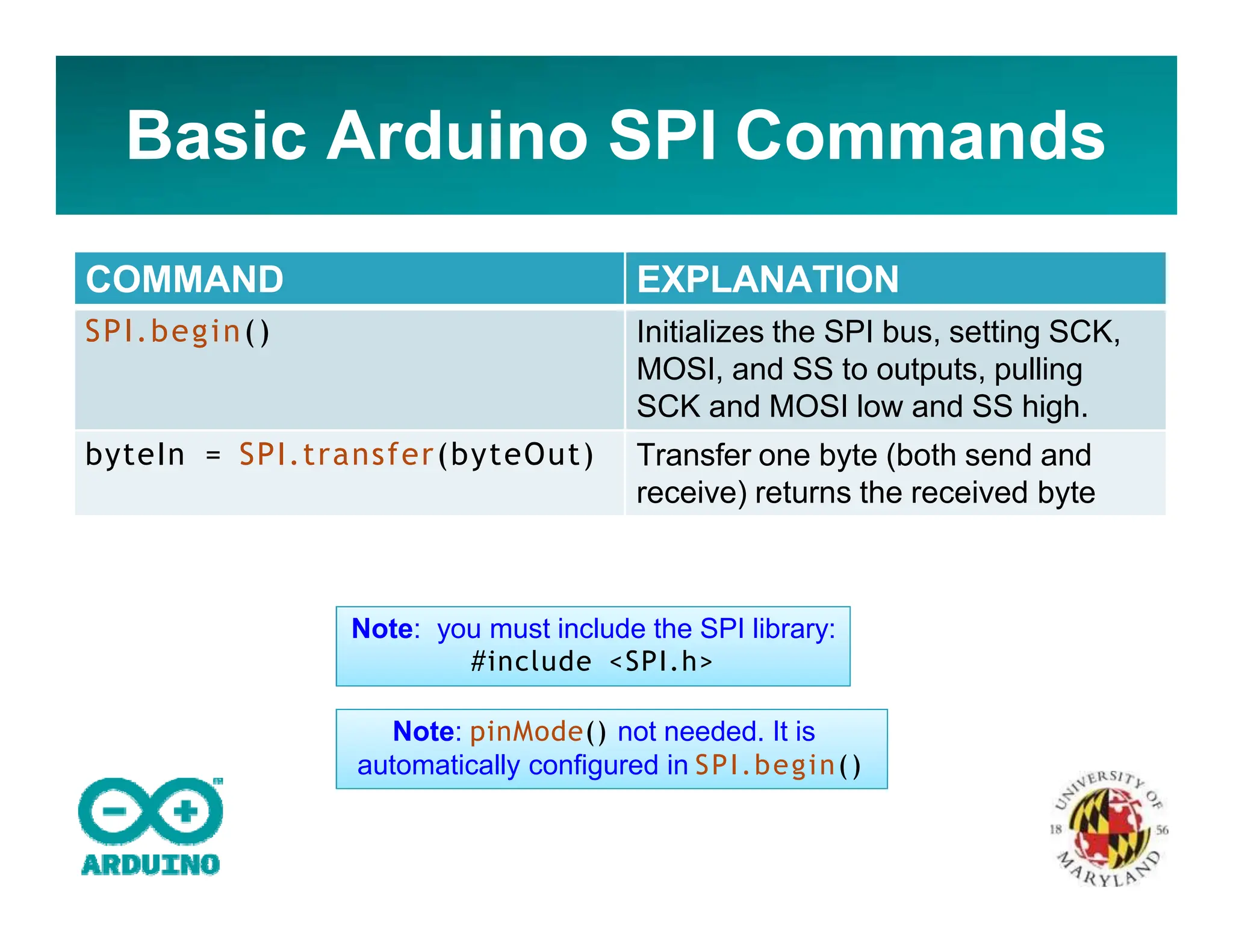
The document provides a comprehensive introduction to the Arduino microcontroller and its application in complex systems, detailing components such as the Atmega328P microcontroller and various Arduino models. It outlines the Arduino IDE, programming structure, and includes hands-on activities for users to implement basic tasks such as controlling LEDs, servos, and analog inputs. The document also explains advanced concepts like serial communication, PWM, and interfacing with other devices using I2C and SPI protocols.