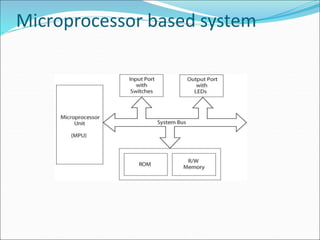
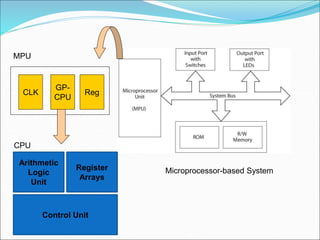
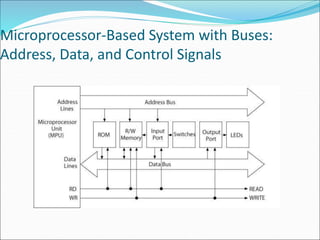
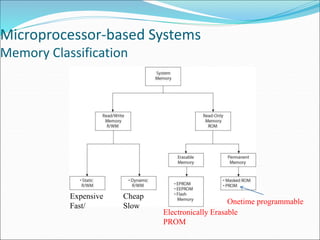
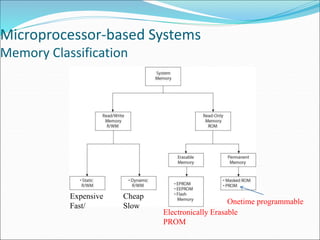
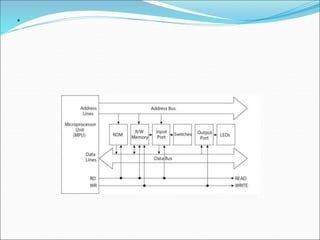
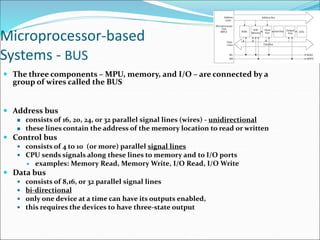
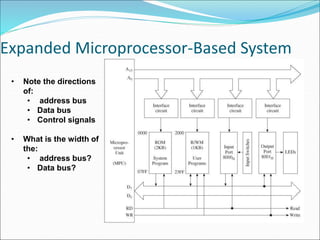
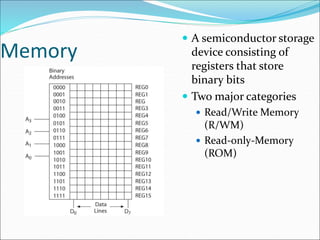
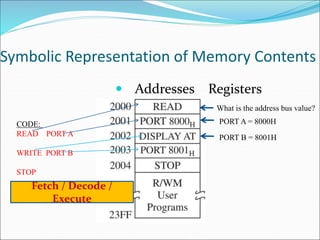
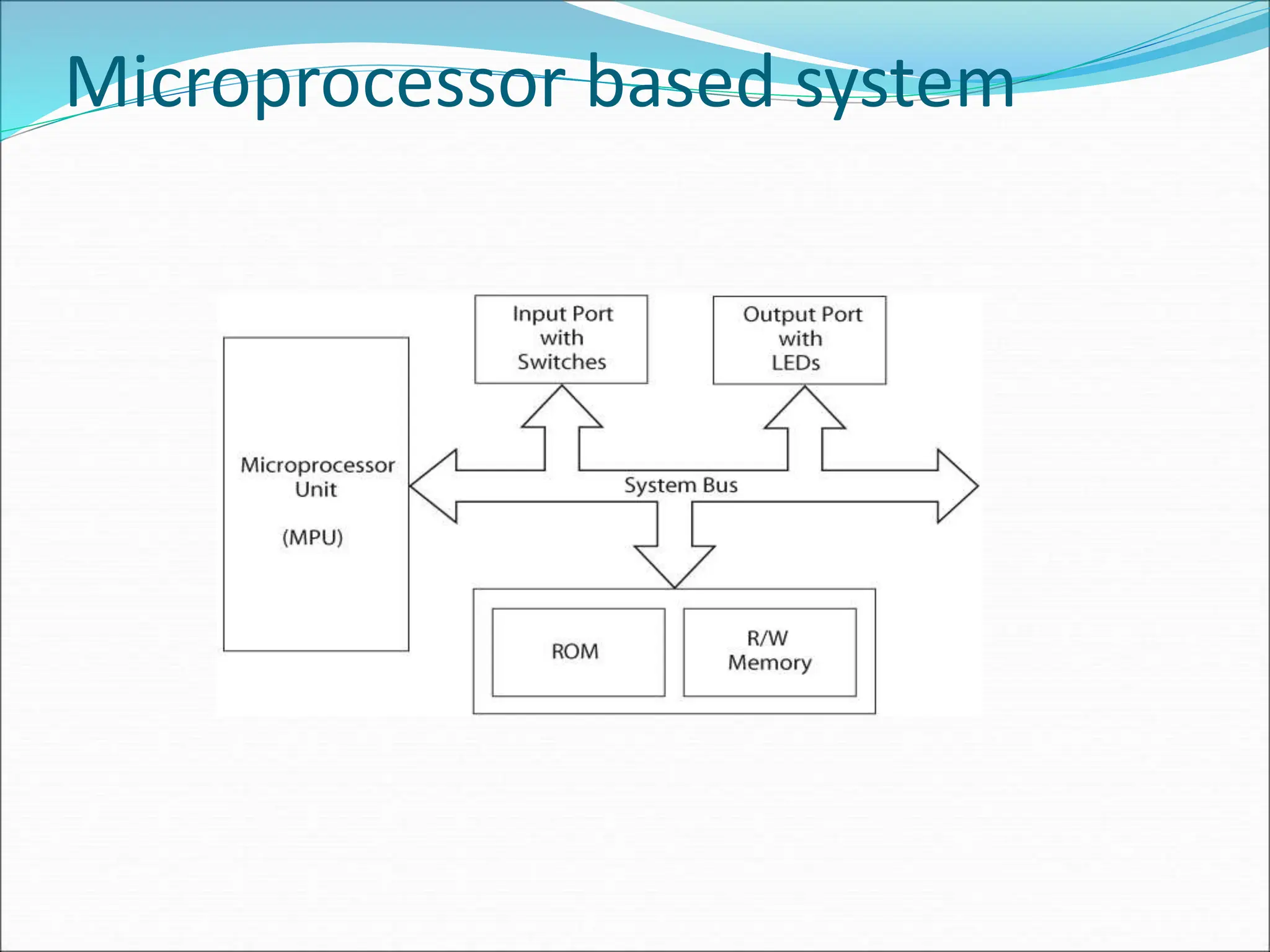
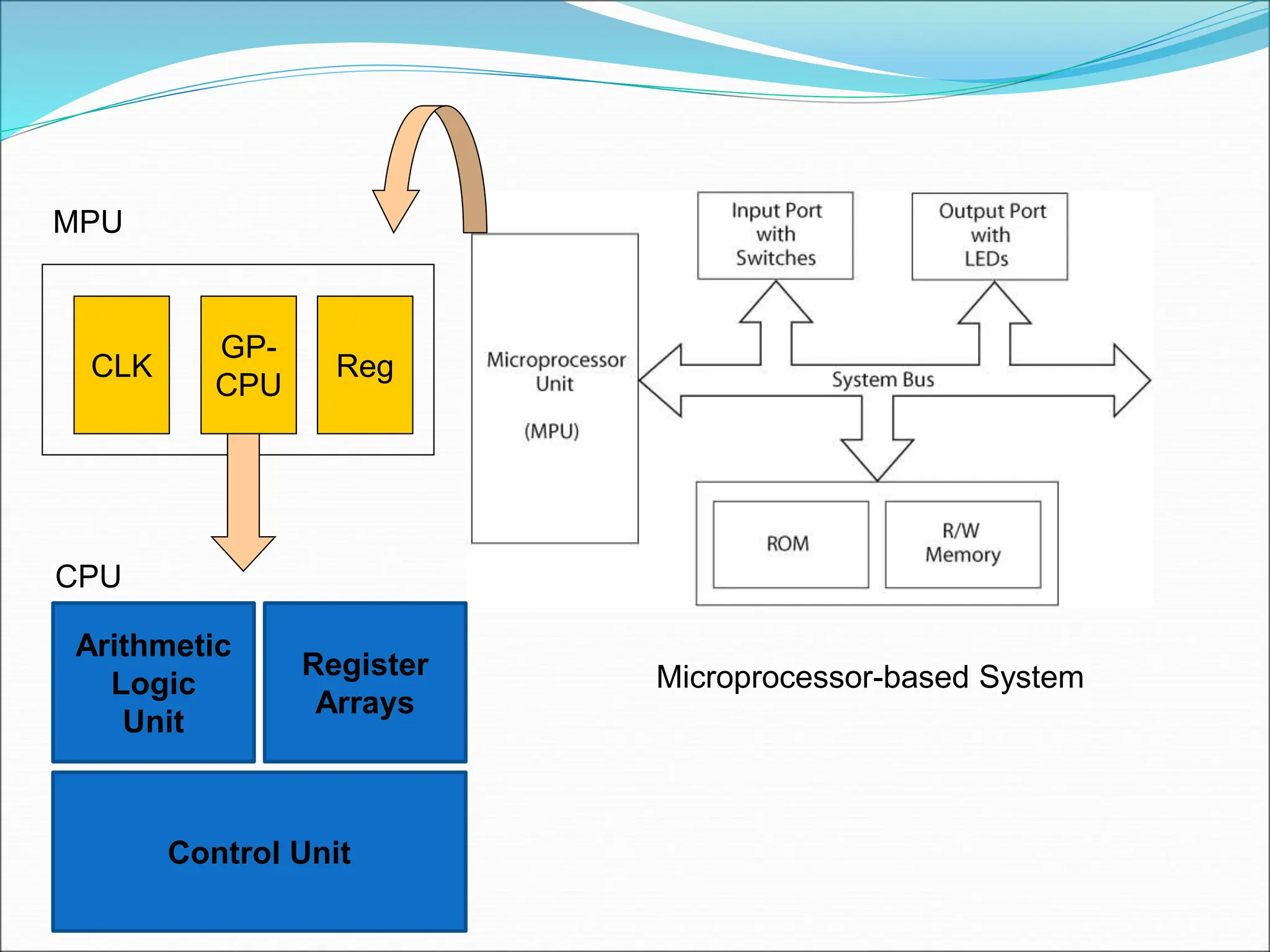
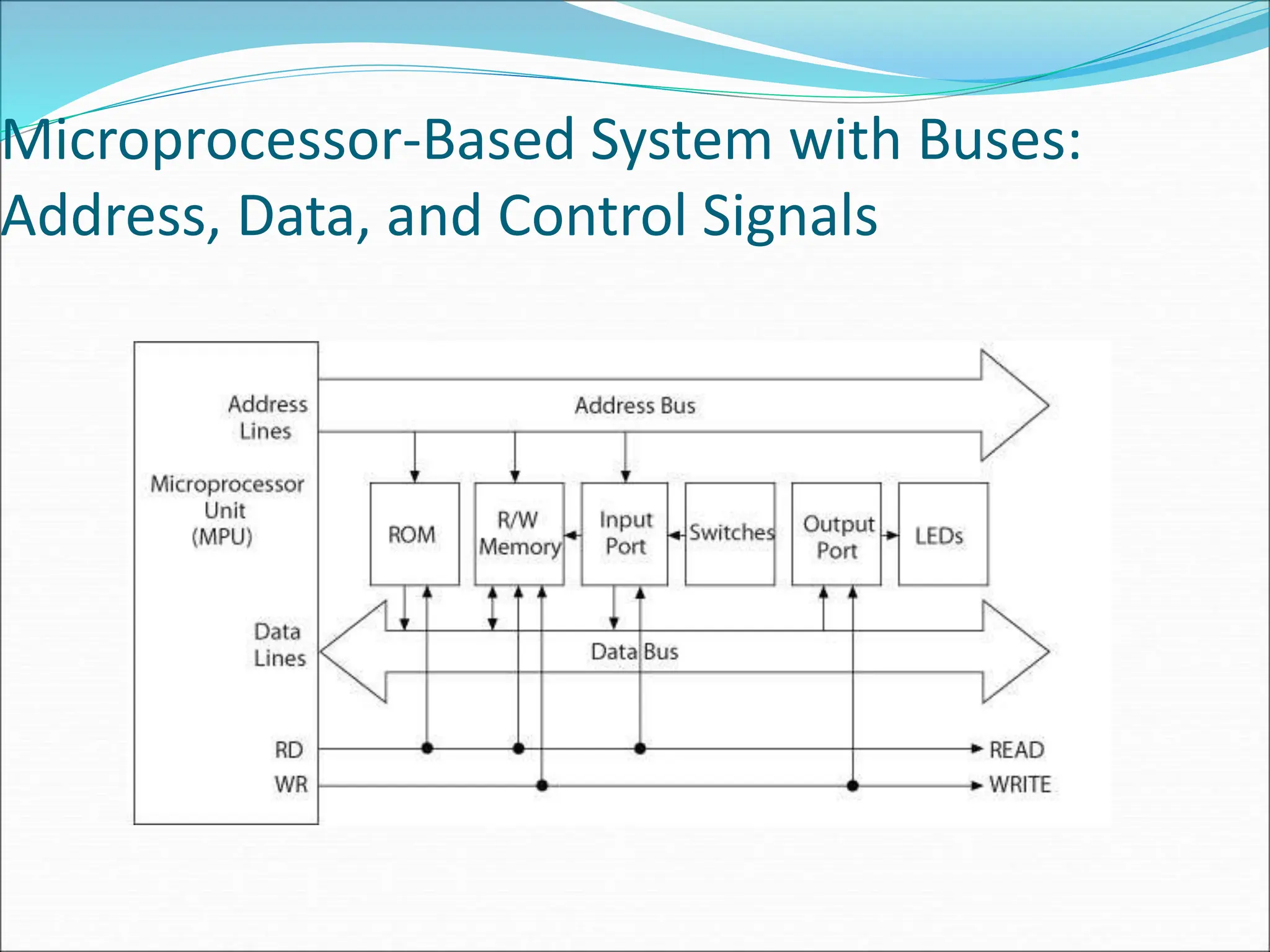
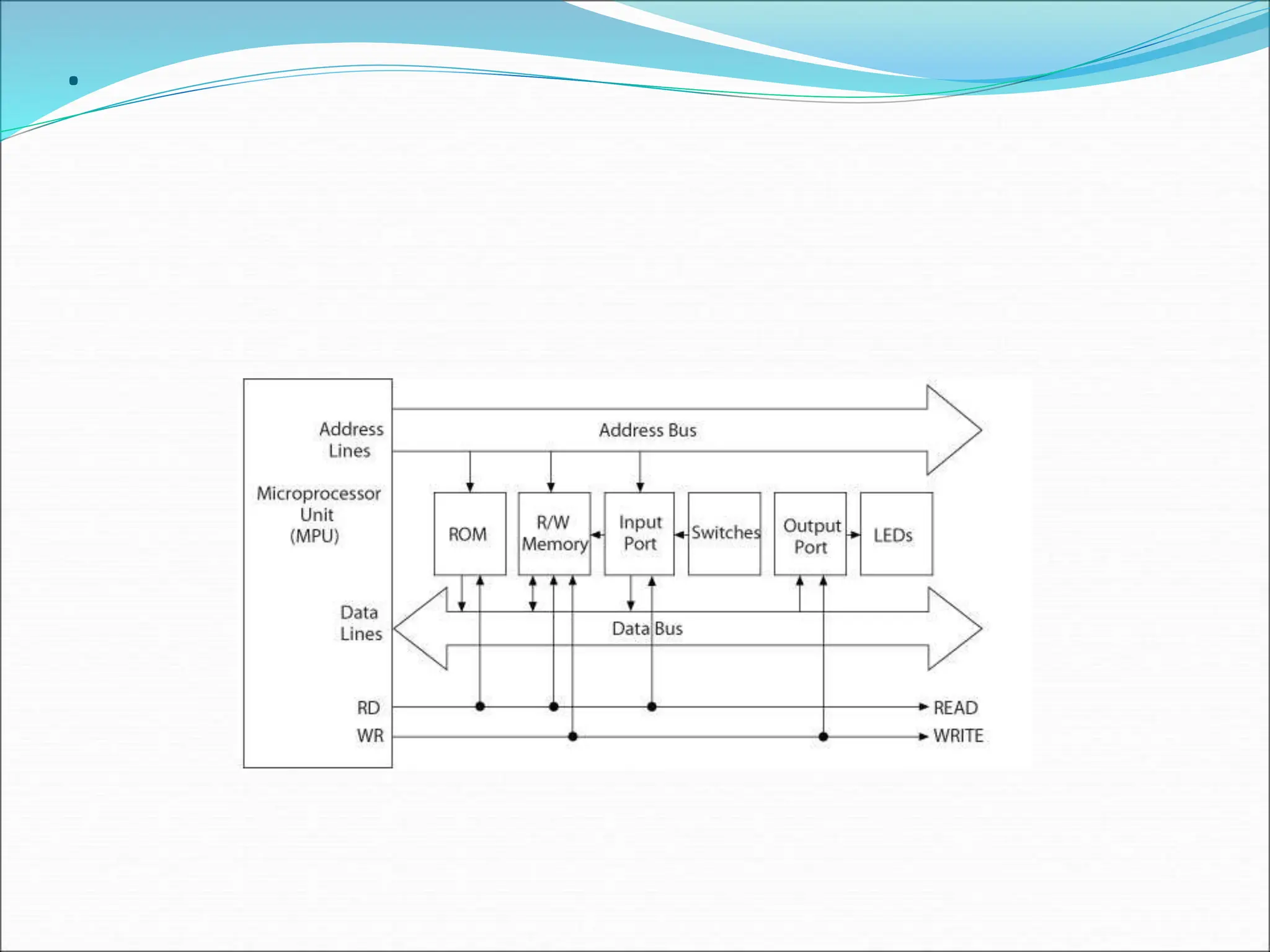
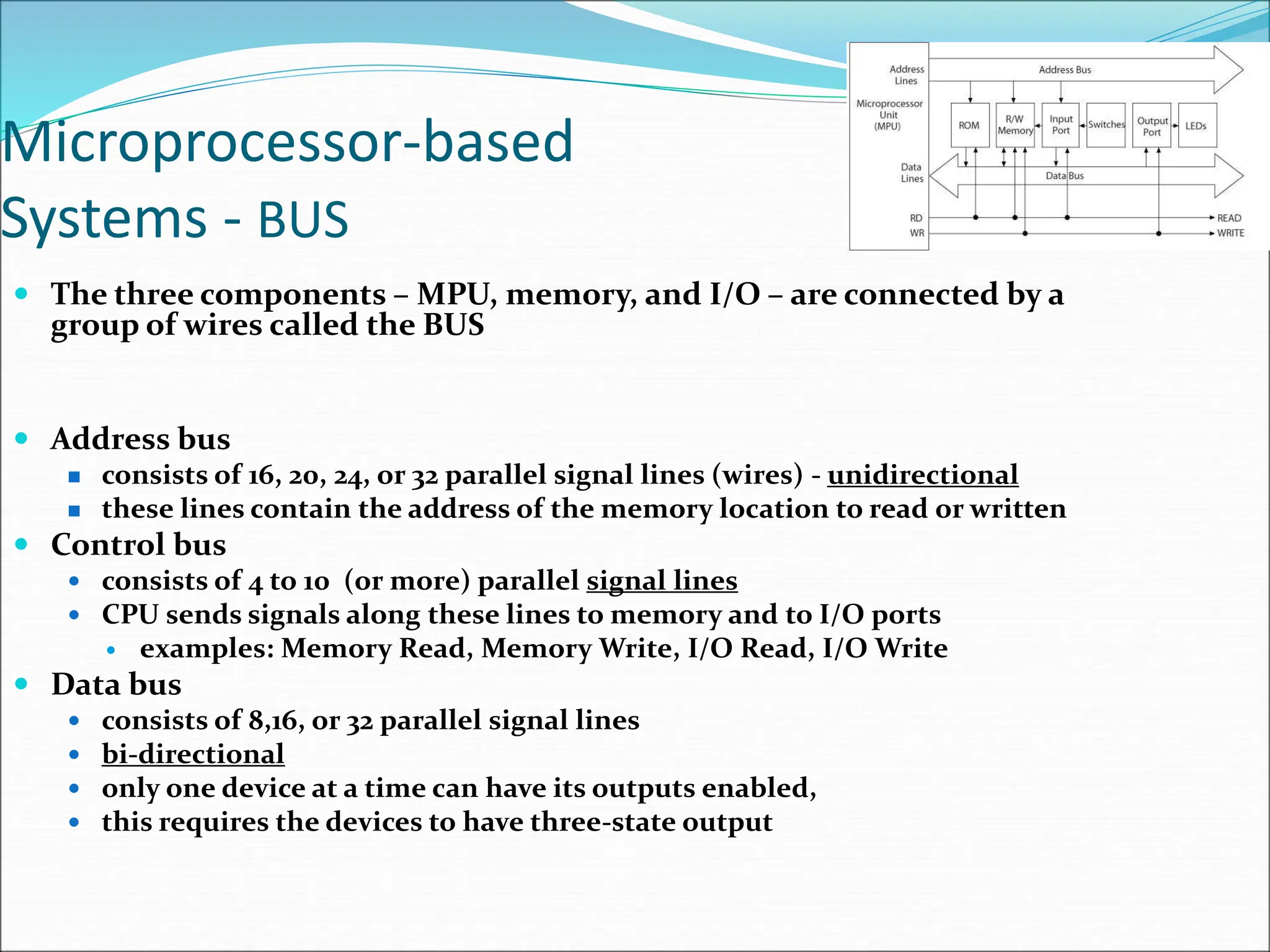
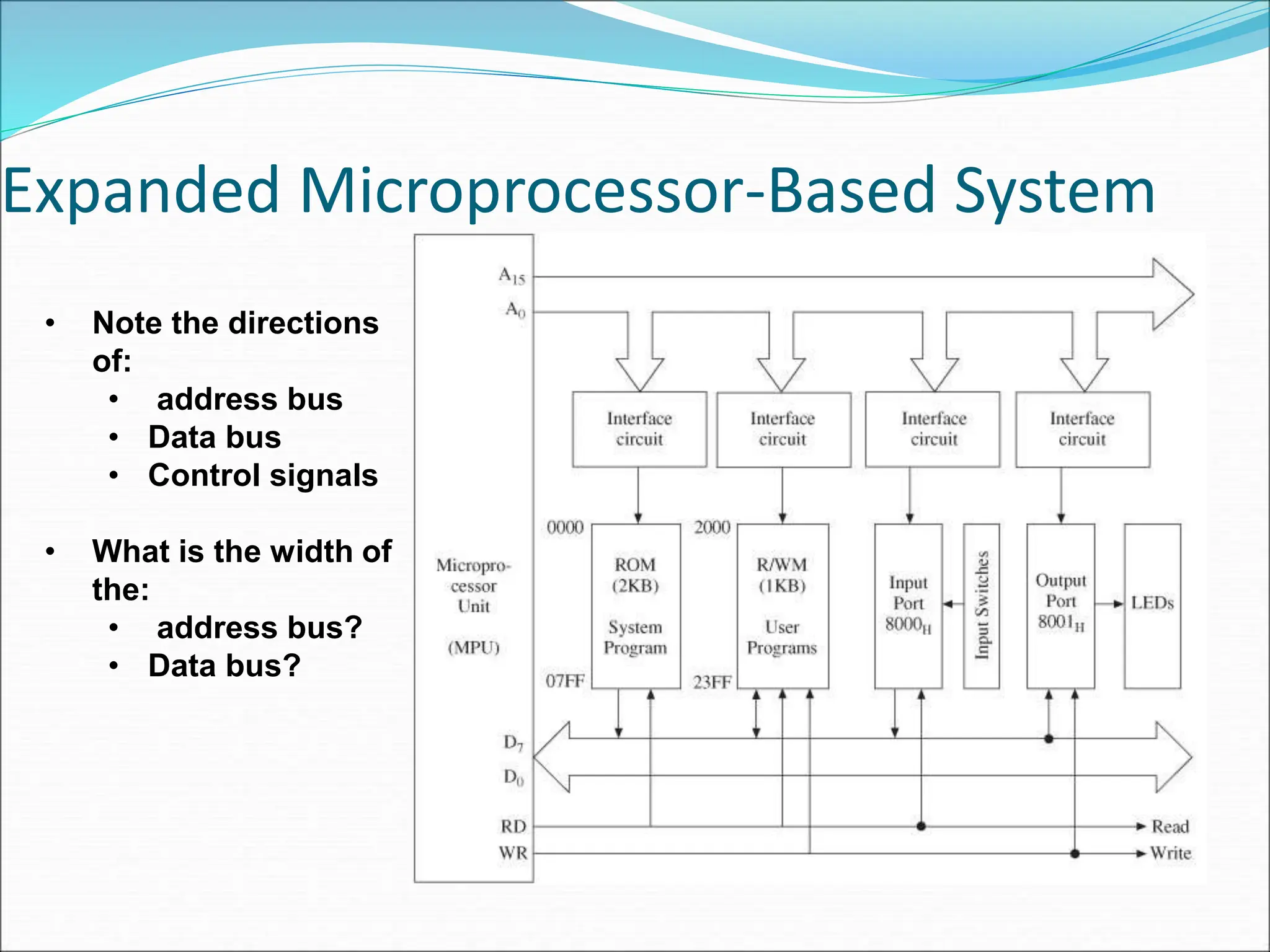
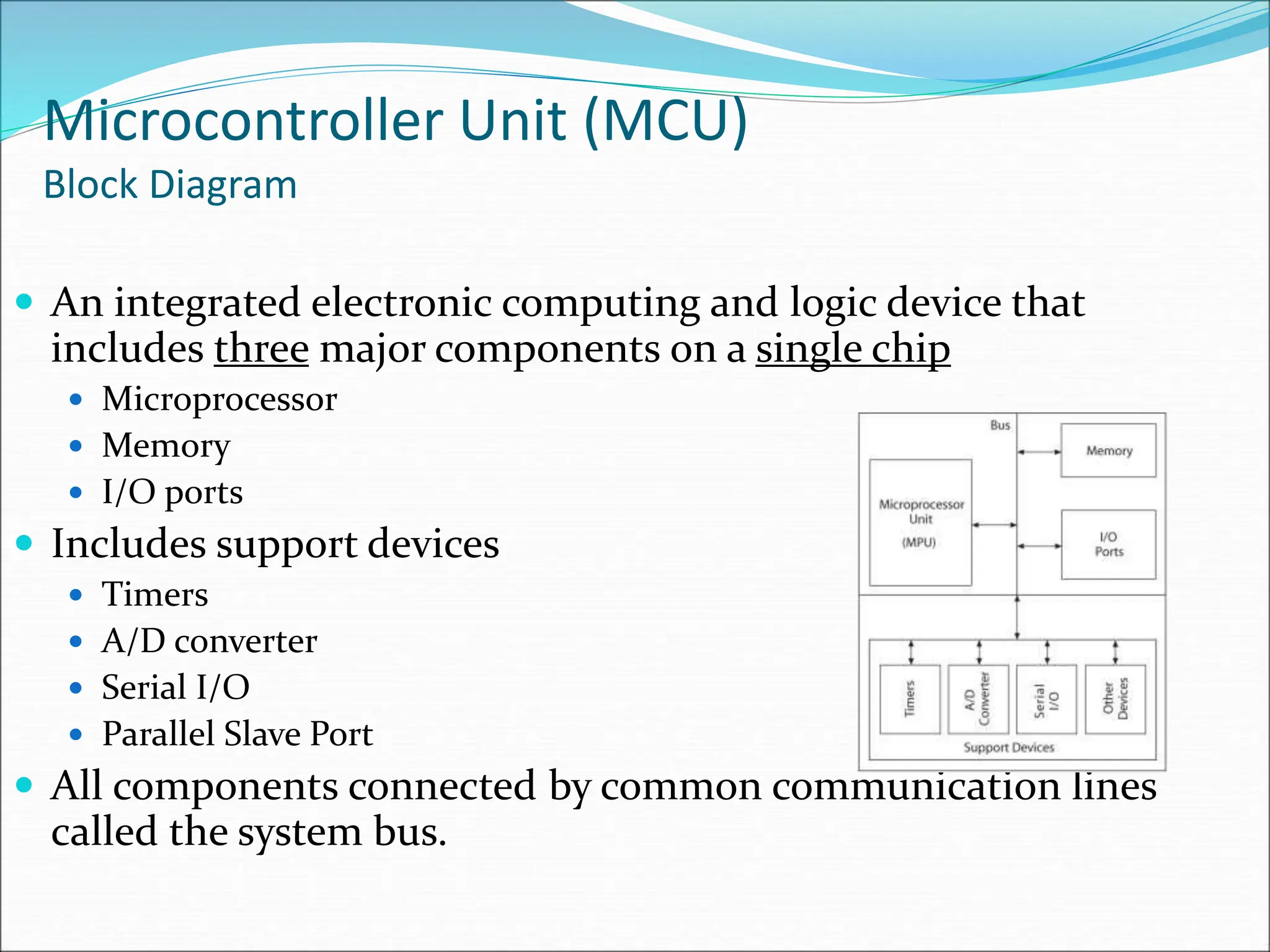
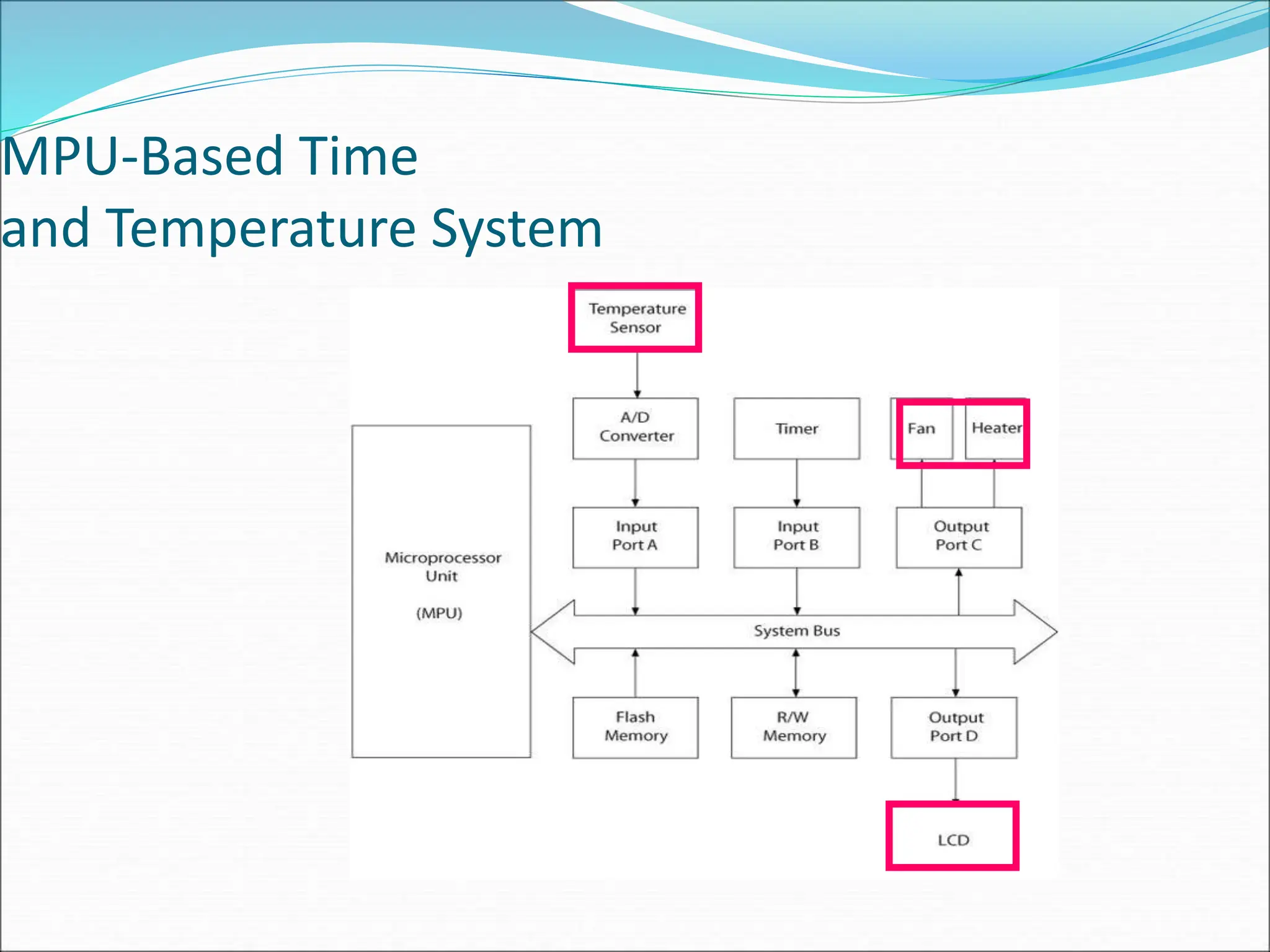
This document provides an introduction to microprocessors and microcontrollers. It begins with a brief history of computers and their classification including mainframes, personal computers, and supercomputers. Embedded controllers are introduced as dedicated systems that perform specific functions. The evolution of integrated circuits and transistors is discussed leading to the development of microprocessors. Key components of microprocessor-based systems including the CPU, memory, I/O ports, and buses are described. Microcontrollers are then introduced as integrated systems that combine a microprocessor with memory and peripherals on a single chip for embedded applications. Several examples of microprocessor and microcontroller-based systems are provided.