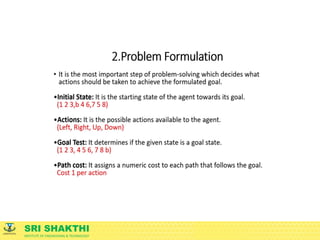
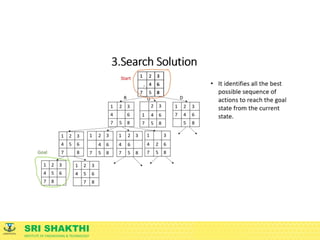
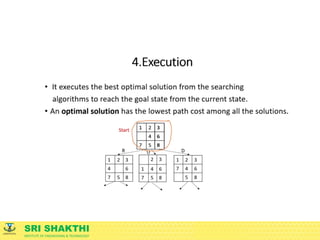
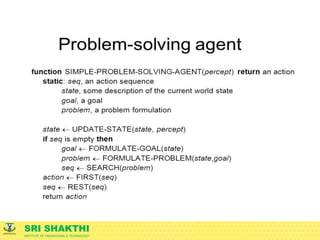
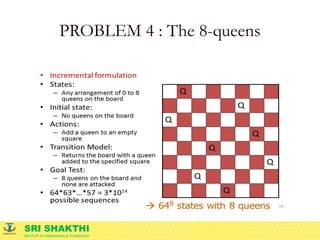
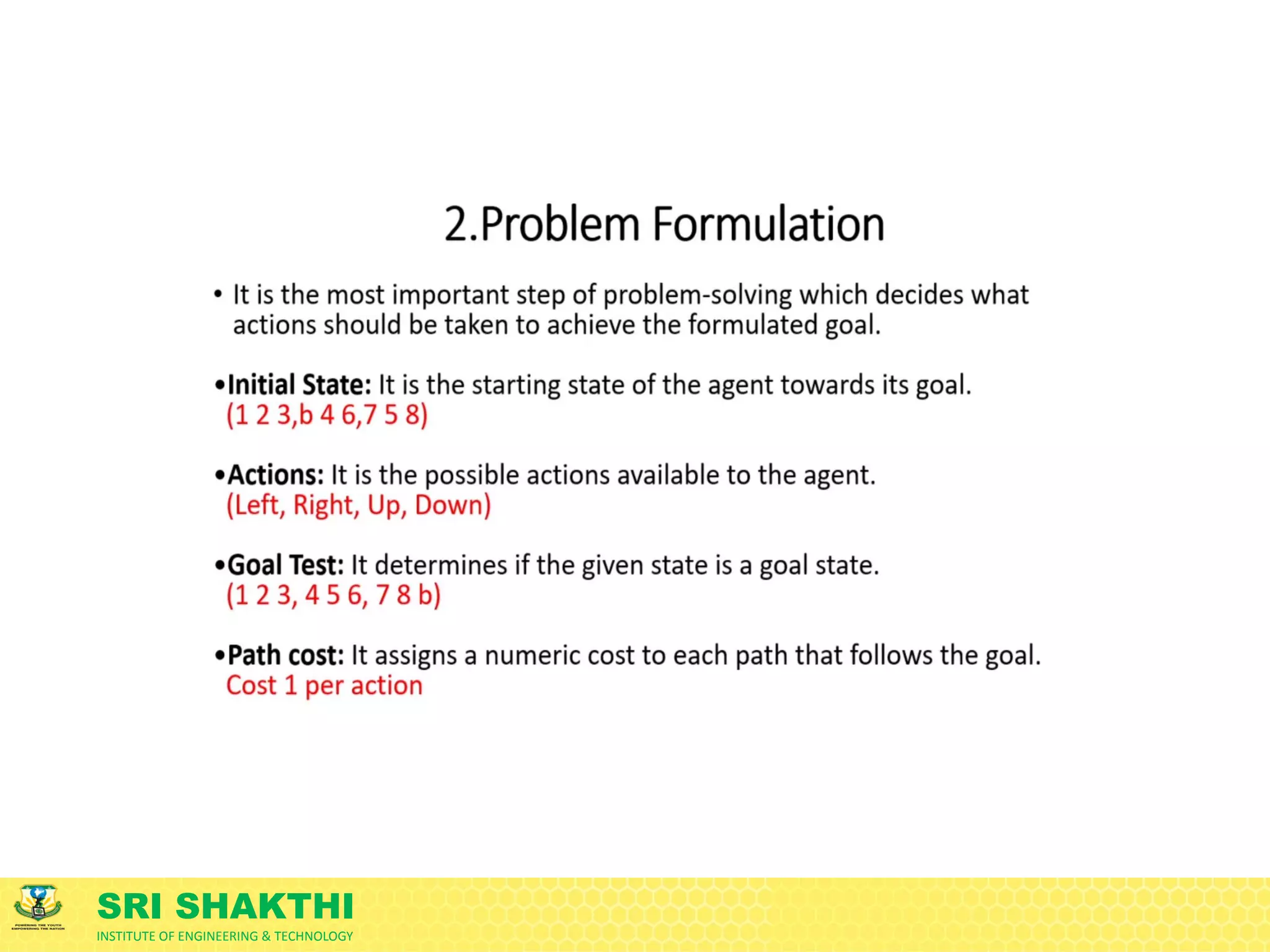
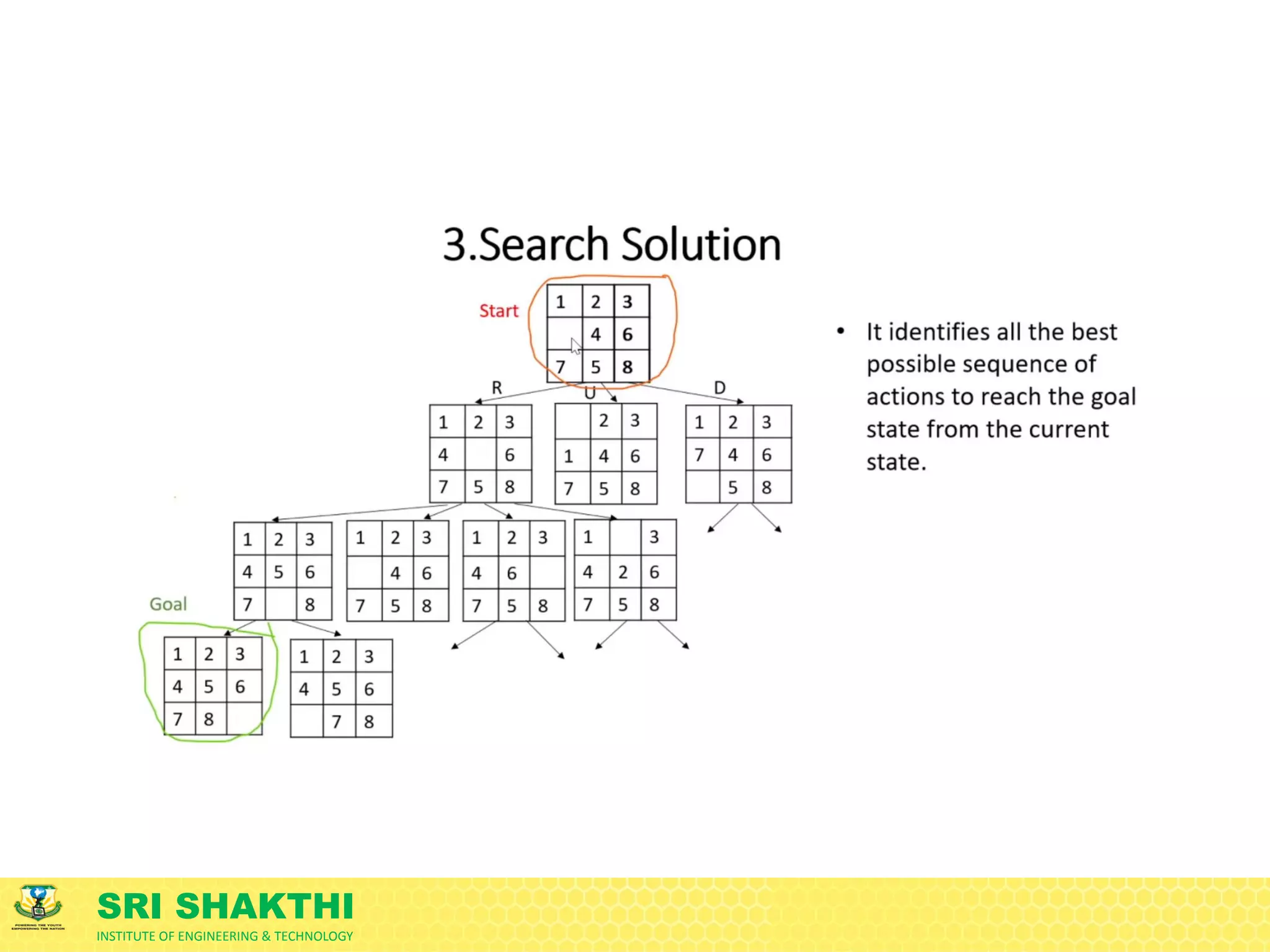
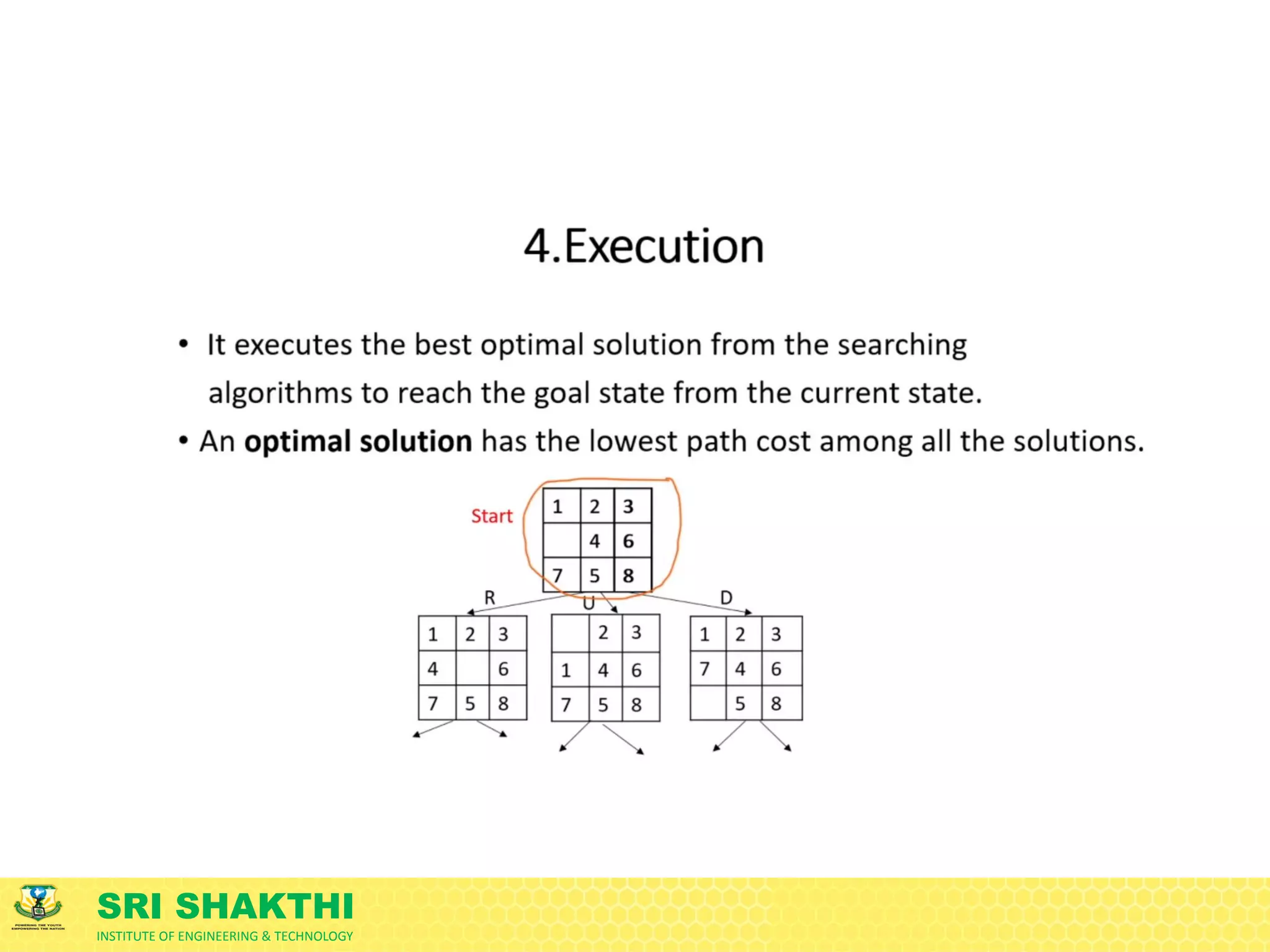
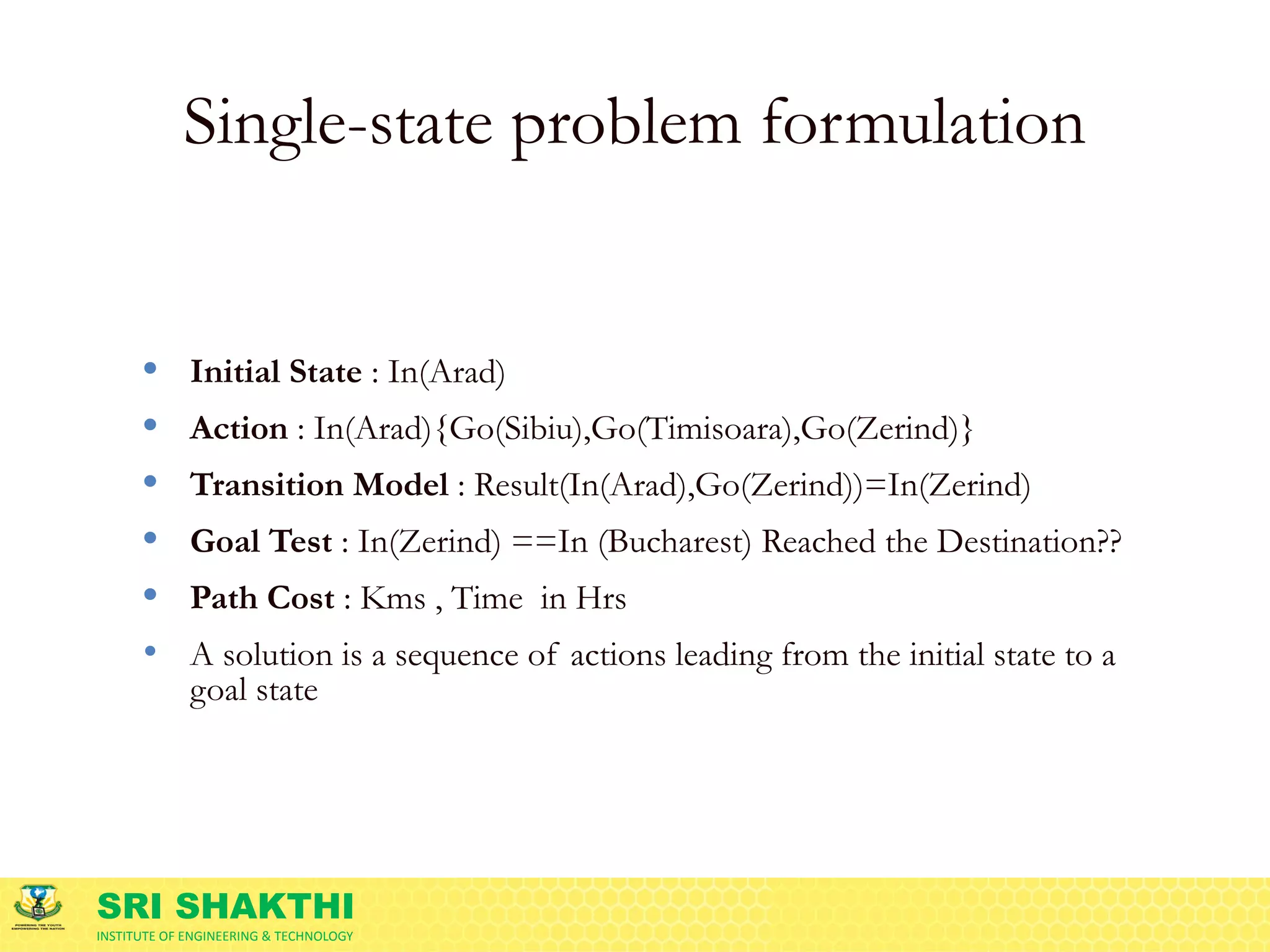
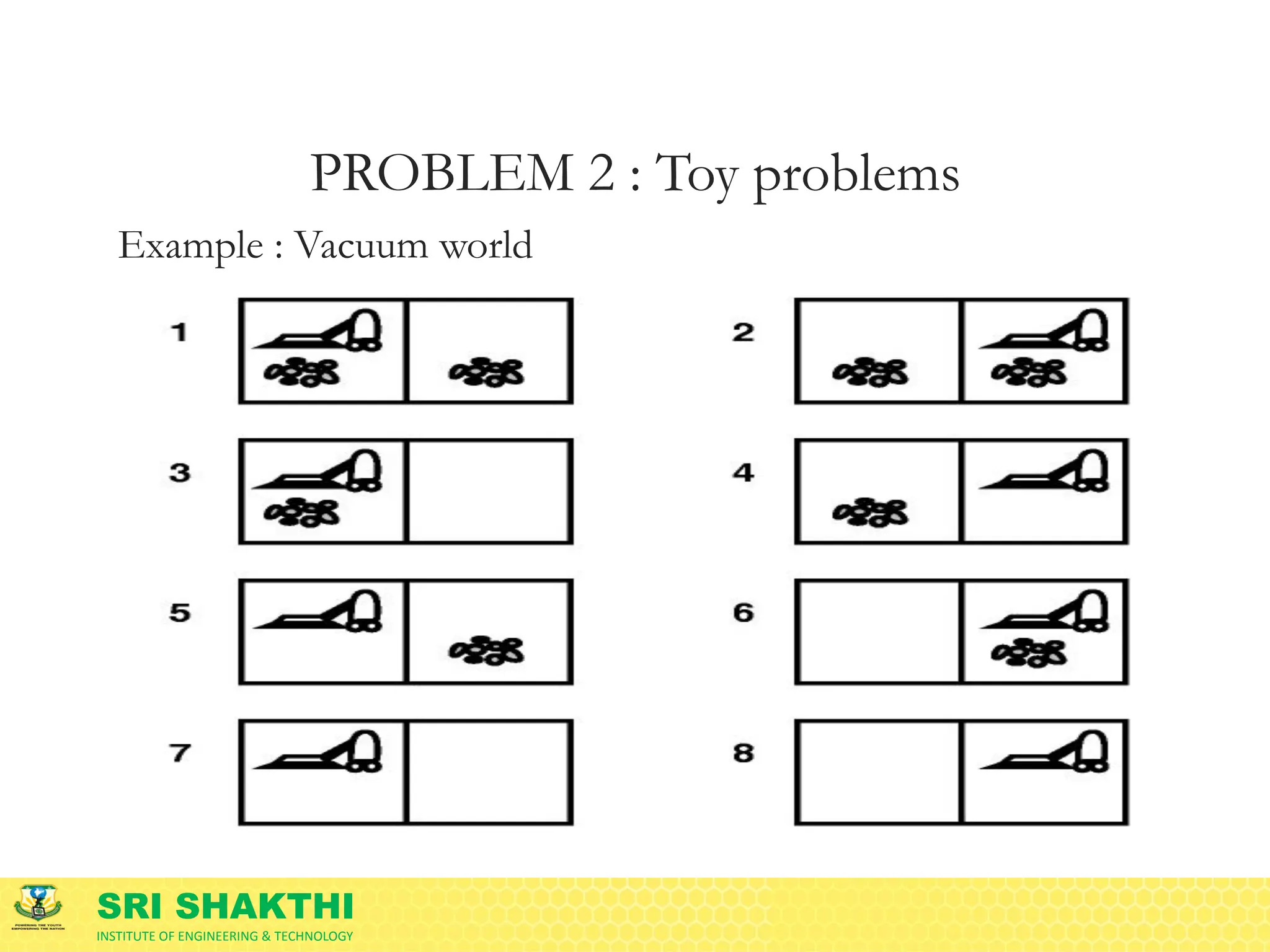
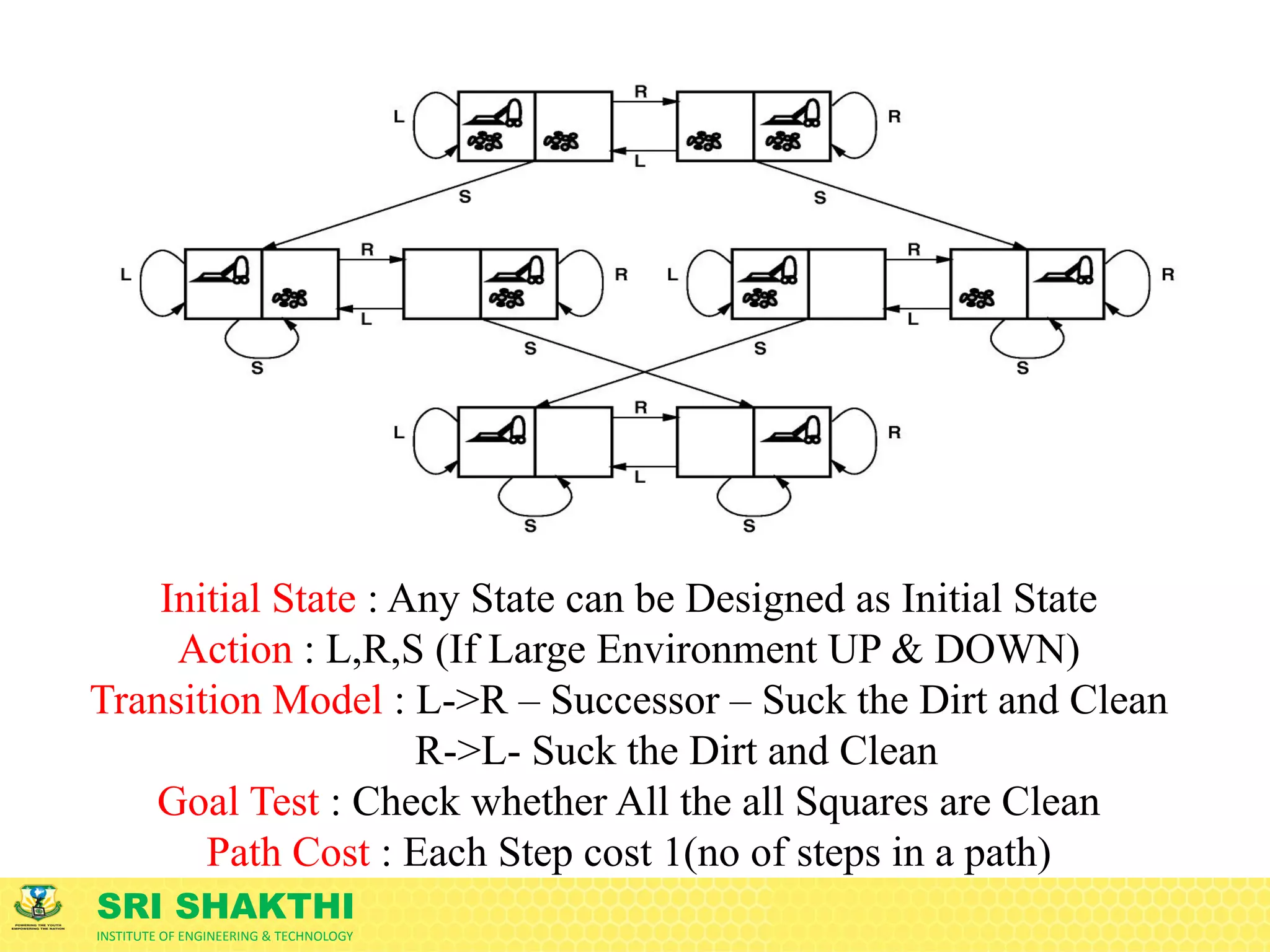
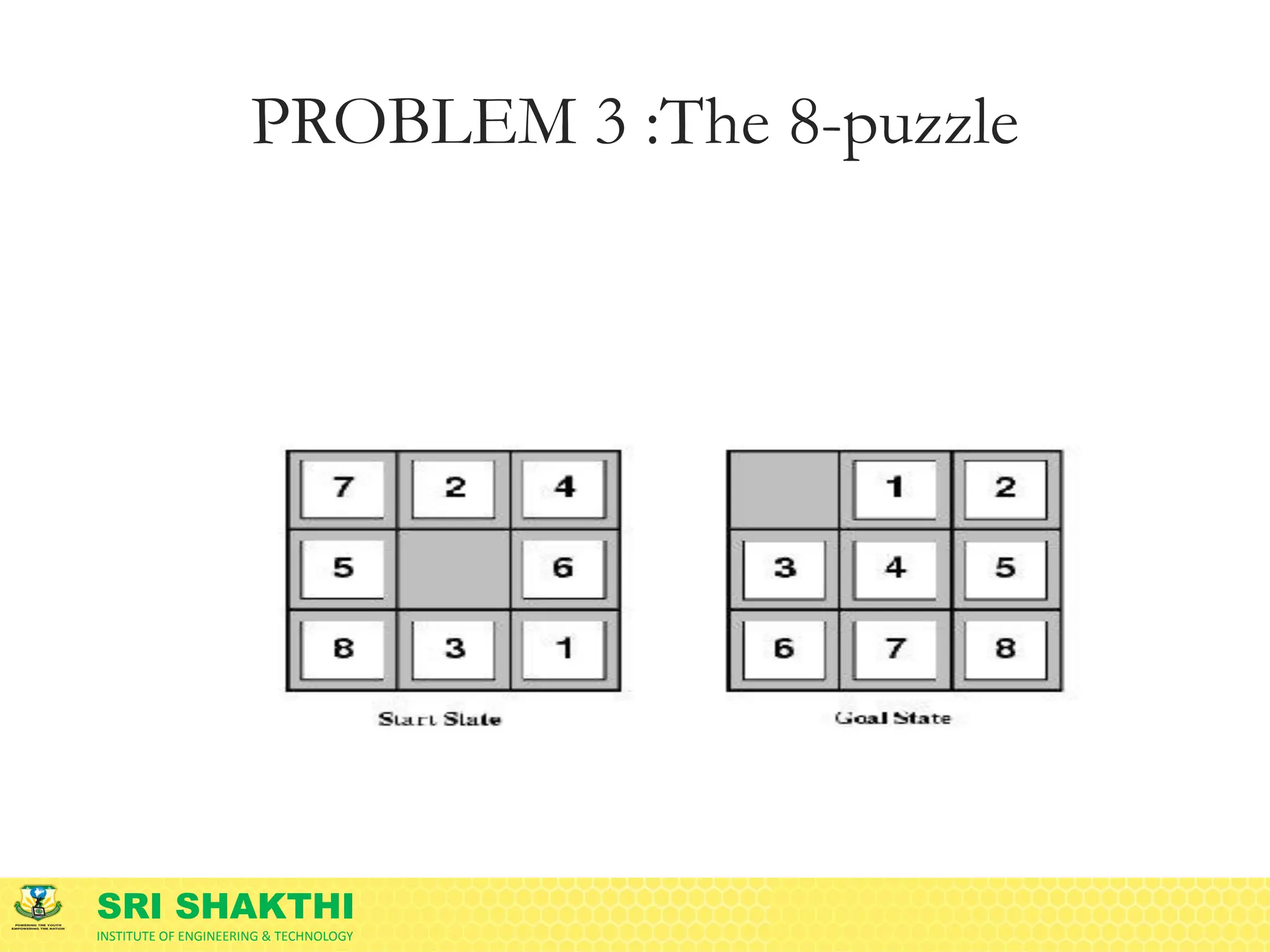
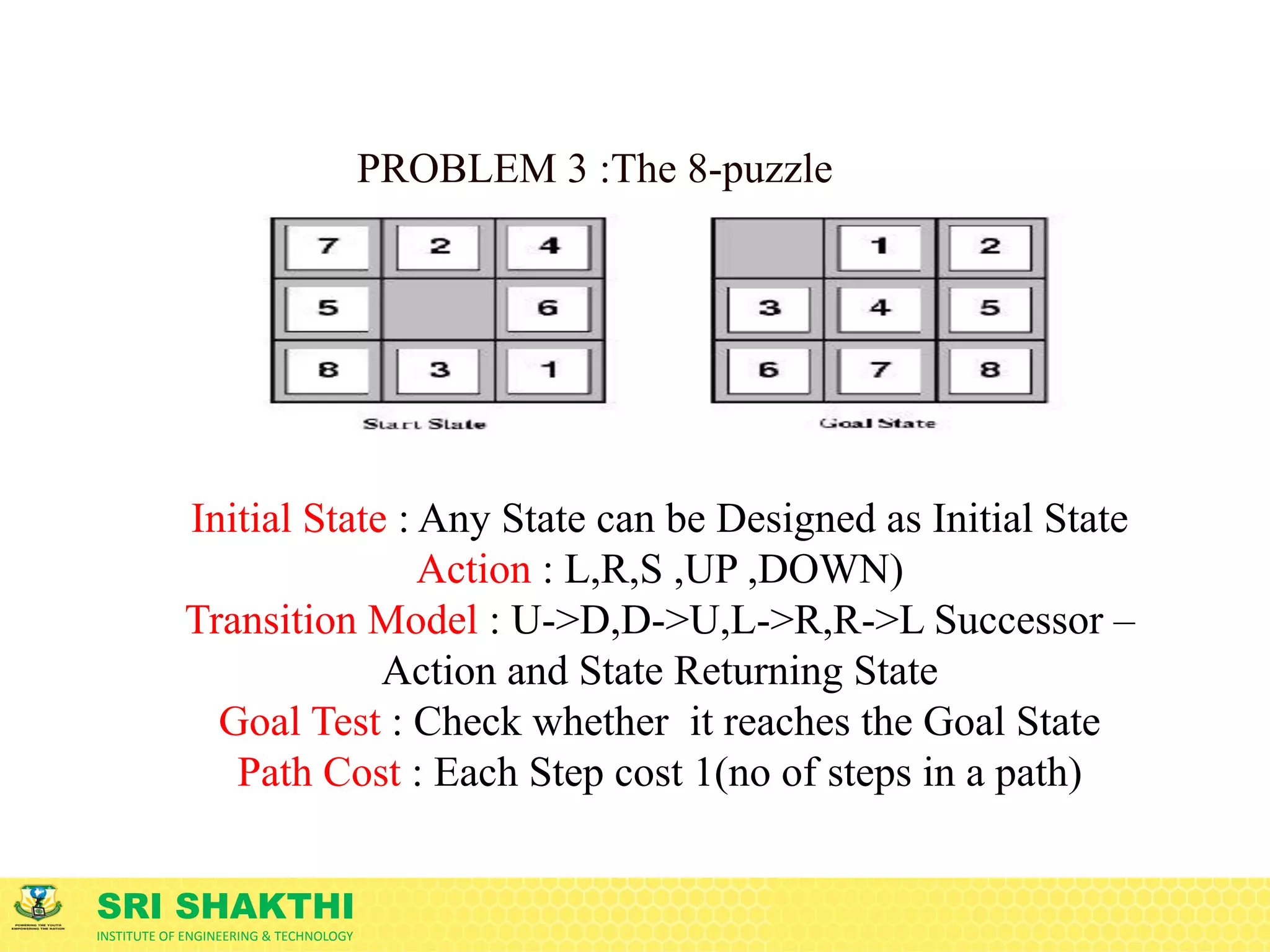
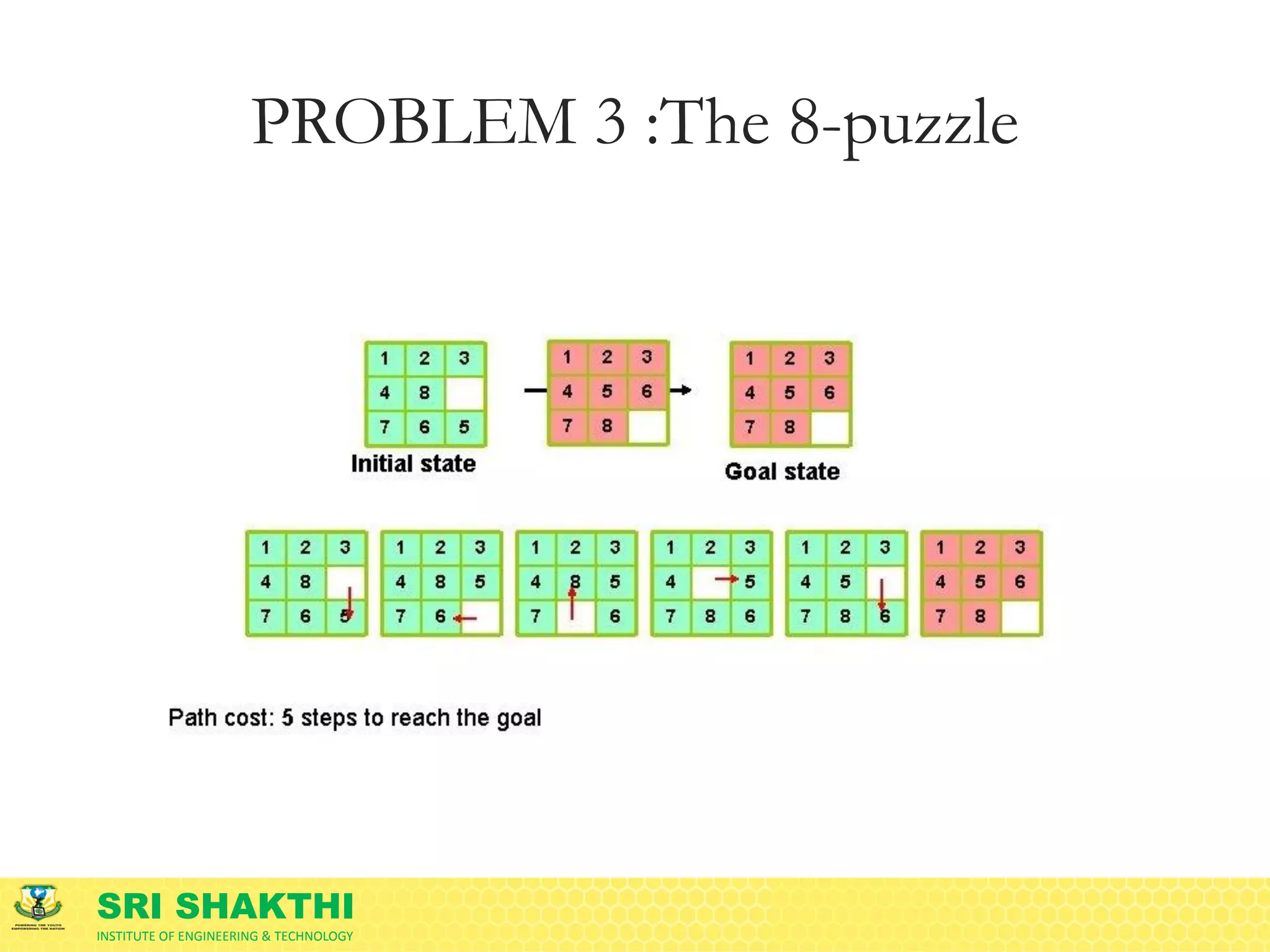
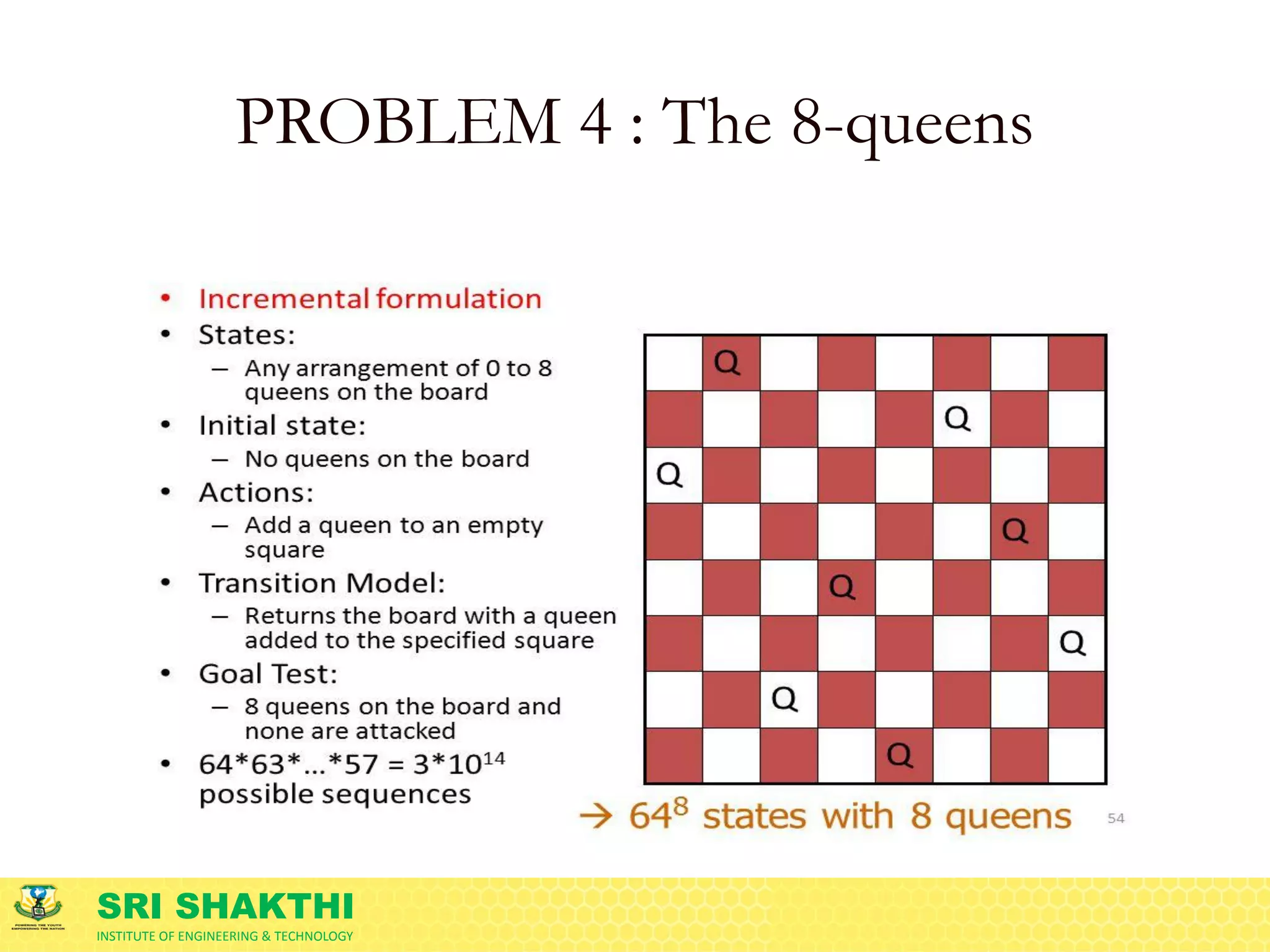
The document discusses problem-solving agents, particularly focusing on reflex and goal-based agents. It outlines the components necessary for well-defined problems, including initial state, actions, transition model, goal tests, and path costs, and emphasizes the importance of abstraction in problem formulation. Additionally, it provides examples of toy problems and real-world problems, illustrating the diverse applications of problem-solving techniques in fields like route finding and robot navigation.